AMAZON multi-meters discounts AMAZON oscilloscope discounts
This section discusses single-phase motors. While focusing on induction motors, synchronous-reluctance, hysteresis, and shaded-pole induction motors are also discussed. Note that another common single-phase motor, the series universal motor, is discussed in Section 7.10. Most induction motors of fractional-kilowatt (fractional horsepower) rating are single-phase motors. In residential and commercial applications, they are found in a wide range of equipment including refrigerators, air conditioners and heat pumps, fans, pumps, washers, and dryers.
In this section, we will describe these motors qualitatively in terms of rotating-field theory and will begin with a rigorous analysis of a single-phase motor operating off of a single winding. However, most single-phase induction motors are actually two-phase motors with unsymmetrical windings; the two windings are typically quite different, with different numbers of turns and/or winding distributions. Thus this section also discusses two-phase motors and includes a development of a quantitative theory for the analysis of single-phase induction motors when operating off both their main and auxiliary windings.
1. SINGLE-PHASE INDUCTION MOTORS: QUALITATIVE EXAMINATION
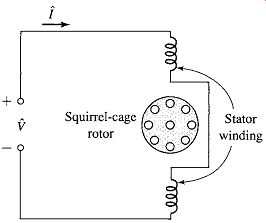
FIG. 1 Schematic view of a single-phase induction motor.
Structurally, the most common types of single-phase induction motors resemble polyphase squirrel-cage motors except for the arrangement of the stator windings.
An induction motor with a squirrel-cage rotor and a single-phase stator winding is represented schematically in FIG. 1. Instead of being a concentrated coil, the actual stator winding is distributed in slots to produce an approximately sinusoidal space distribution of mmf. As we saw in Section 4.5.1, a single-phase winding produces equal forward- and backward-rotating mmf waves. By symmetry, it is clear that such a motor inherently will produce no starting torque since at standstill, it will produce equal torque in both directions. However, we will show that if it is started by auxiliary means, the result will be a net torque in the direction in which it is started, and hence the motor will continue to run.
Before we consider auxiliary starting methods, we will discuss the basic properties of the schematic motor of FIG. 1. If the stator current is a cosinusoidal function of time, the resultant air-gap mmf is given by Eq. 4.18
(Eq. 1)
which, as shown in Section 4.5.1, can be written as the sum of positive- and negative-traveling mmf waves of equal magnitude. The positive-traveling wave is given by
(Eq. 2)
and the negative-traveling wave is given by
(Eq. 3)
Each of these component mmf waves produces induction-motor action, but the corresponding torques are in opposite directions. With the rotor at rest, the forward and backward air-gap flux waves created by the combined mmf's of the stator and rotor currents are equal, the component torques are equal, and no starting torque is produced. If the forward and backward air-gap flux waves were to remain equal when the rotor revolves, each of the component fields would produce a torque-speed characteristic similar to that of a polyphase motor with negligible stator leakage impedance, as illustrated by the dashed curves f and b in FIG. 2a. The resultant torque-speed characteristic, which is the algebraic sum of the two component curves, shows that if the motor were started by auxiliary means, it would produce torque in whatever direction it was started.
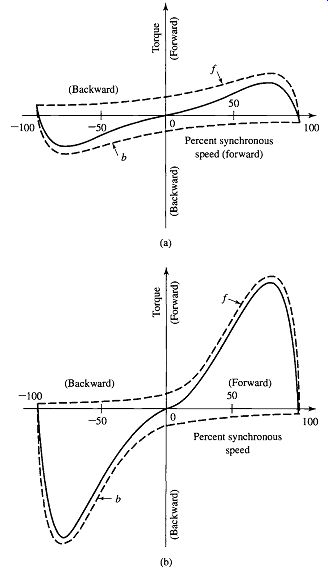
FIG. 2 Torque-speed characteristic of a single-phase induction motor
(a) on the basis of constant forward and backward flux waves, (b) taking
into account changes in the flux waves.
The assumption that the air-gap flux waves remain equal when the rotor is in motion is a rather drastic simplification of the actual state of affairs. First, the effects of stator leakage impedance are ignored. Second, the effects of induced rotor currents are not properly accounted for. Both these effects will ultimately be included in the detailed quantitative theory of Sect. 3. The following qualitative explanation shows that the performance of a single-phase induction motor is considerably better than would be predicted on the basis of equal forward and backward flux waves.
When the rotor is in motion, the component rotor currents induced by the backward field are greater than at standstill, and their power factor is lower. Their mmf,
detailed quantitative theory of Sect. 3. The following qualitative explanation shows that the performance of a single-phase induction motor is considerably better than would be predicted on the basis of equal forward and backward flux waves.
When the rotor is in motion, the component rotor currents induced by the backward field are greater than at standstill, and their power factor is lower. Their mmf, which opposes that of the stator current, results in a reduction of the backward flux wave. Conversely, the magnetic effect of the component currents induced by the forward field is less than at standstill because the rotor currents are less and their power factor is higher. As speed increases, therefore, the forward flux wave increases while the backward flux wave decreases. The sum of these flux waves must remain roughly constant since it must induce the stator counter emf, which is approximately constant if the stator leakage-impedance voltage drop is small.
Hence, with the rotor in motion, the torque of the forward field is greater and that of the backward field less than in FIG. 2a, the true situation being about that shown in FIG. 2b. In the normal running region at a few percent slip, the forward field is several times greater than the backward field, and the flux wave does not differ greatly from the constant-amplitude revolving field in the air gap of a balanced polyphase motor. In the normal running region, therefore, the torque-speed characteristic of a single-phase motor is not too greatly inferior to that of a polyphase motor having the same rotor and operating with the same maximum air-gap flux density.
In addition to the torques shown in FIG. 2, double-stator-frequency torque pulsations are produced by the interactions of the oppositely rotating flux and mmf waves which rotate past each other at twice synchronous speed. These interactions produce no average torque, but they tend to make the motor noisier than a polyphase motor. Such torque pulsations are unavoidable in a single-phase motor because of the pulsations in instantaneous power input inherent in a single-phase circuit. The effects of the pulsating torque can be minimized by using an elastic mounting for the motor.
The torque referred to on the torque-speed curves of a single-phase motor is the time average of the instantaneous torque.
2. STARTING AND RUNNING PERFORMANCE OF SINGLE-PHASE INDUCTION AND SYNCHRONOUS MOTORS
Single-phase induction motors are classified in accordance with their starting methods and are usually referred to by names descriptive of these methods. Selection of the appropriate motor is based on the starting- and running-torque requirements of the load, the duty cycle of the load, and the limitations on starting and running current from the supply line for the motor. The cost of single-phase motors increases with their rating and with their performance characteristics such as starting-torque-to-current ratio. Typically, in order to minimize cost, an application engineer will select the motor with the lowest rating and performance that can meet the specifications of the application. Where a large number of motors are to be used for a specific purpose, a special motor may be designed in order to ensure the least cost. In the fractional-kilowatt motor business, small differences in cost are important.
Starting methods and the resulting torque-speed characteristics are considered qualitatively in this section. A quantitative theory for analyzing these motors is developed in Sect. 4.2.
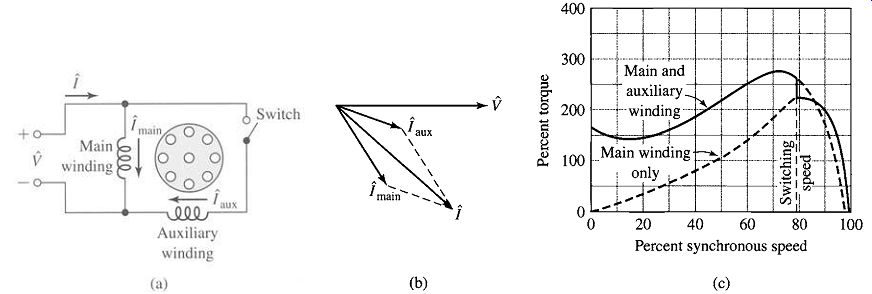
FIG. 3 Split-phase motor: (a) connections, (b) phasor diagram at starting,
and (c) typical torque-speed characteristic.
2.1 Split-Phase Motors
Split-phase motors have two stator windings, a main winding (also referred to as the run winding) which we will refer to with the subscript 'main' and an auxiliary winding (also referred to as the start winding) which we will refer to with the subscript 'aux'. As in a two-phase motor, the axes of these windings are displaced 90 electrical degrees in space, and they are connected as shown in FIG. 3a. The auxiliary winding has a higher resistance-to-reactance ratio than the main winding, with the result that the two currents will be out of phase, as indicated in the phasor diagram of FIG. 3b, which is representative of conditions at starting. Since the auxiliary-winding current I_aux leads the main-winding current I_main, the stator field first reaches a maximum along the axis of the auxiliary winding and then somewhat later in time reaches a maximum along the axis of the main winding.
The winding currents are equivalent to unbalanced two-phase currents, and the motor is equivalent to an unbalanced two-phase motor. The result is a rotating stator field which causes the motor to start. After the motor starts, the auxiliary winding is disconnected, usually by means of a centrifugal switch that operates at about 75 percent of synchronous speed. The simple way to obtain the high resistance-to-reactance ratio for the auxiliary winding is to wind it with smaller wire than the main winding, a permissible procedure because this winding operates only during starting. Its reactance can be reduced somewhat by placing it in the tops of the slots. A typical torque-speed characteristic for such a motor is shown in FIG. 3c.
Split-phase motors have moderate starting torque with low starting current. Typical applications include fans, blowers, centrifugal pumps, and office equipment. Typical ratings are 50 to 500 watts; in this range they are the lowest-cost motors available.
2.2 Capacitor-Type Motors
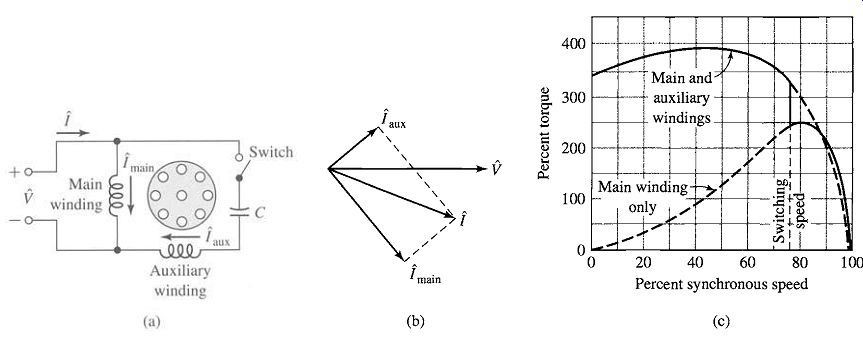
FIG. 4 Capacitor-start motor: (a) connections, (b) phasor diagram at
starting, and (c) typical torque-speed characteristic.
Capacitors can be used to improve motor starting performance, running performance, or both, depending on the size and connection of the capacitor. The capacitor-start motor is also a split-phase motor, but the time-phase displacement between the two currents is obtained by means of a capacitor in series with the auxiliary winding, as shown in FIG. 4a. Again the auxiliary winding is disconnected after the motor has started, and consequently the auxiliary winding and capacitor can be designed at minimum cost for intermittent service.
By using a starting capacitor of appropriate value, the auxiliary-winding current I aux at standstill can be made to lead the main-winding current I main by 90 electrical degrees, as it would in a balanced two-phase motor (see FIG. 4b). In practice, the best compromise between starting torque, starting current, and cost typically results with a phase angle somewhat less than 90 °. A typical torque-speed characteristic is shown in FIG. 4c, high starting torque being an outstanding feature. These motors are used for compressors, pumps, refrigeration and air-conditioning equipment, and other hard-to-start loads. A cutaway view of a capacitor-start motor is shown in FIG. 5.
In the permanent-split-capacitor motor, the capacitor and auxiliary winding are not cut out after starting; the construction can be simplified by omission of the switch, and the power factor, efficiency, and torque pulsations improved. For example, the capacitor and auxiliary winding could be designed for perfect two-phase operation (i.e., no backwards flux wave) at any one desired load. The losses due to the backward field at this operating point would then be eliminated, with resulting improvement in efficiency. The double-stator-frequency torque pulsations would also be eliminated, with the capacitor serving as an energy storage reservoir for smoothing out the pulsations in power input from the single-phase line, resulting in quieter operation.
Starting torque must be sacrificed because the choice of capacitance is necessarily a compromise between the best starting and running values. The resulting torque-speed characteristic and a schematic diagram are given in FIG. 6.
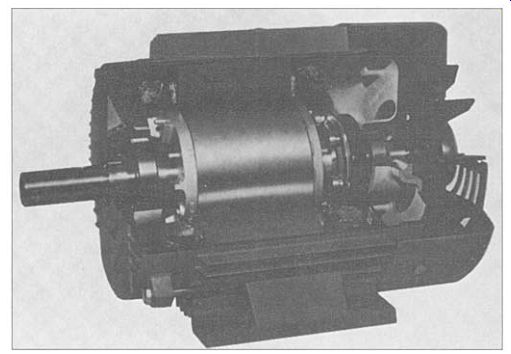
FIG. 5 Cutaway view of a capacitor-start induction motor.
The starting switch is at the right of the rotor. The motor is of drip-proof construction.
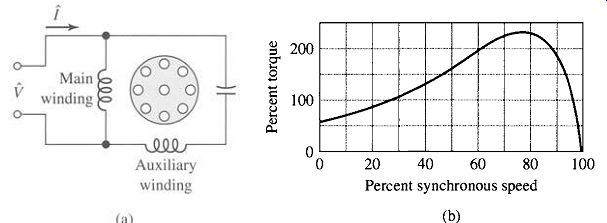
FIG. 6 Permanent-split-capacitor motor and typical torque-speed characteristic.
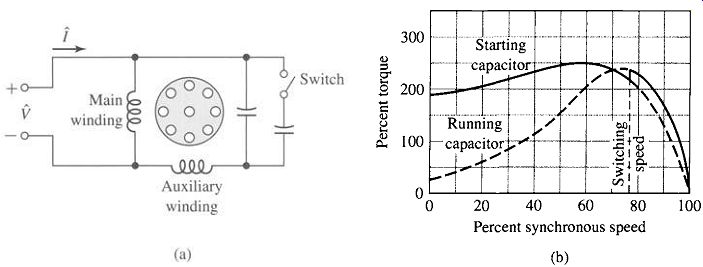
FIG. 7 Capacitor-start, capacitor-run motor and typical torque-speed
characteristic.
If two capacitors are used, one for starting and one for running, theoretically optimum starting and running performance can both be obtained. One way of accomplishing this result is shown in FIG. 7a. The small value of capacitance required for optimum running conditions is permanently connected in series with the auxiliary winding, and the much larger value required for starting is obtained by a capacitor connected in parallel with the running capacitor via a switch with opens as the motor comes up to speed. Such a motor is known as a capacitor-start, capacitor-run motor.
The capacitor for a capacitor-start motor has a typical value of 300 #F for a 500-W motor. Since it must carry current for just the starting time, the capacitor is a special compact ac electrolytic type made for motor-starting duty. The capacitor for the same motor permanently connected has a typical rating of 40 #E and since it operates continuously, the capacitor is an ac paper, foil, and oil type. The cost of the various motor types is related to performance: the capacitor-start motor has the lowest cost, the permanent-split-capacitor motor next, and the capacitor-start, capacitor-run motor the highest cost.
-----------------
Practice Problem 1
Consider the motor of Example 1. Find the phase angle between the main- and auxiliary-winding currents if the 177-uF capacitor is replaced by a 200-uF capacitor.
Solution
85.2 °
----------------
2.3 Shaded-Pole Induction Motors
As illustrated schematically in FIG. 8a, the shaded-pole induction motor usually has salient poles with one portion of each pole surrounded by a short-circuited turn of copper called a shading coil. Induced currents in the shading coil cause the flux in the shaded portion of the pole to lag the flux in the other portion. The result is similar to a rotating field moving in the direction from the unshaded to the shaded portion of the pole; currents are induced in the squirrel-cage rotor and a low starting torque is produced. A typical torque-speed characteristic is shown in FIG. 8b. Their efficiency is low, but shaded-pole motors are the least expensive type of sub-fractional-kilowatt motor. They are found in ratings up to about 50 watts.
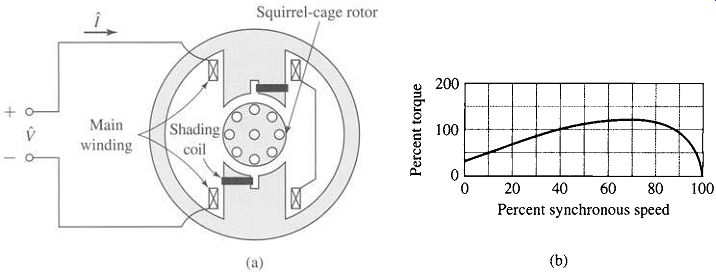
FIG. 8 Shaded-pole induction motor and typical torque-speed characteristic.
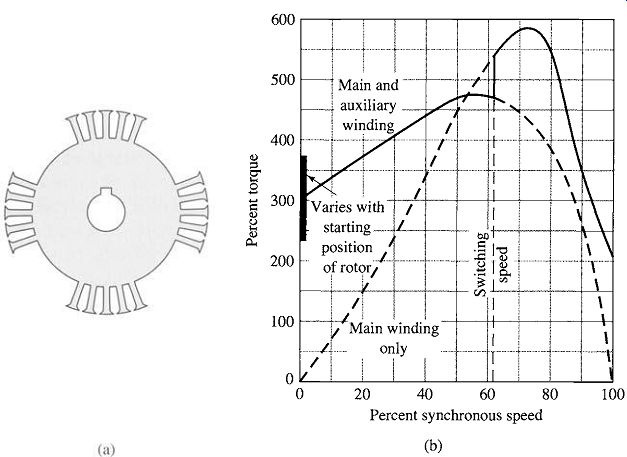
FIG. 9 Rotor punching for four-pole synchronous-reluctance motor and
typical torque-speed characteristic.
2.4 Self-Starting Synchronous-Reluctance Motors
Any one of the induction-motor types described above can be made into a self-starting synchronous-reluctance motor. Anything which makes the reluctance of the air gap a function of the angular position of the rotor with respect to the stator coil axis will produce reluctance torque when the rotor is revolving at synchronous speed. For example, suppose some of the teeth are removed from a squirrel-cage rotor, leaving the bars and end tings intact, as in an ordinary squirrel-cage induction motor. FIG. 9a shows a lamination for such a rotor designed for use with a four-pole stator. The stator may be polyphase or any one of the single-phase types described above.
The motor will start as an induction motor and at light loads will speed up to a small value of slip. The reluctance torque arises from the tendency of the rotor to try to align itself in the minimum-reluctance position with respect to the synchronously revolving forward air-gap flux wave, in accordance with the principles discussed in Section 3. At a small slip, this torque alternates slowly in direction; the rotor is accelerated during a positive half cycle of the torque variation and decelerated during the succeeding negative half cycle. If the moment of inertia of the rotor and its mechanical load are sufficiently small, the rotor will be accelerated from slip speed up to synchronous speed during an accelerating half cycle of the reluctance torque.
The rotor will then pull into synchronism and continue to run at synchronous speed.
The presence of any backward-revolving stator flux wave will produce torque ripple and additional losses, but synchronous operation will be maintained provided the load torque is not excessive.
A typical torque-speed characteristic for a split-phase-start synchronous-reluctance motor is shown in FIG. 9b. Notice the high values of induction-motor torque. The reason for this is that in order to obtain satisfactory synchronous-motor characteristics, it has been found necessary to build synchronous-reluctance motors in frames which would be suitable for induction motors of two or three times their synchronous-motor rating. Also notice that the principal effect of the salient-pole rotor on the induction-motor characteristic is at standstill, where considerable "cogging" is evident; i.e., the torque varies considerably with rotor position.
2.5 Hysteresis Motors
The phenomenon of hysteresis can be used to produce mechanical torque. In its simplest form, the rotor of a hysteresis motor is a smooth cylinder of magnetically hard steel, without windings or teeth. It is placed inside a slotted stator carrying distributed windings designed to produce as nearly as possible a sinusoidal space distribution of flux, since undulations in the flux wave greatly increase the losses. In single-phase motors, the stator windings usually are of the permanent-split-capacitor type, as in FIG. 6. The capacitor is chosen so as to result in approximately balanced two-phase conditions within the motor windings. The stator then produces a primarily space-fundamental air-gap field revolving at synchronous speed.
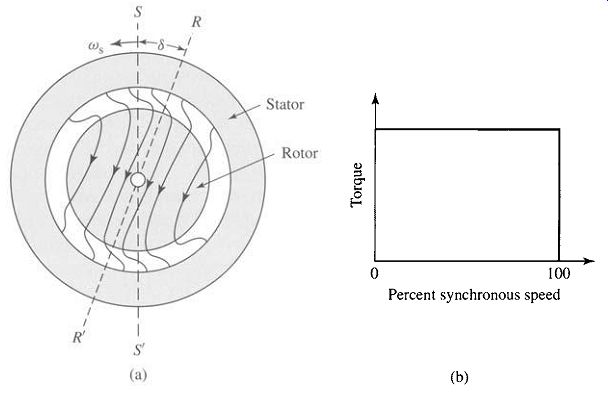
FIG. 10 (a) General nature of the magnetic field in the air gap and
rotor of a hysteresis motor; (b) idealized torque-speed characteristic.
Instantaneous magnetic conditions in the air gap and rotor are indicated in FIG. 10a for a two-pole stator. The axis S S' of the stator-mmf wave revolves at synchronous speed. Because of hysteresis, the magnetization of the rotor lags behind the inducing mmf wave, and therefore the axis R R' of the rotor flux wave lags behind the axis of the stator-mmf wave by the hysteretic lag angle 6 (FIG. 10a). If the rotor is stationary, starting torque is produced proportional to the product of the fundamental components of the stator mmf and rotor flux and the sine of the torque angle 6. The rotor then accelerates if the torque of the load is less than the developed torque of the motor.
As long as the rotor is turning at less than synchronous speed, each region of the rotor is subjected to a repetitive hysteresis cycle at slip frequency. While the rotor accelerates, the lag angle 6 remains constant if the flux is constant, since the angle 6 depends merely on the hysteresis loop of the rotor material and is independent of the rate at which the loop is traversed. The motor therefore develops constant torque right up to synchronous speed, as shown in the idealized torque-speed characteristic of FIG. 10b. This feature is one of the advantages of the hysteresis motor. In contrast with a reluctance motor, which must "snap" its load into synchronism from an induction-motor torque-speed characteristic, a hysteresis motor can synchronize any load which it can accelerate, no matter how great the inertia. After reaching synchronism, the motor continues to run at synchronous speed and adjusts its torque angle so as to develop the torque required by the load.
The hysteresis motor is inherently quiet and produces smooth rotation of its load. Furthermore, the rotor takes on the same number of poles as the stator field. The motor lends itself to multispeed synchronous operation when the stator is wound with several sets of windings and utilizes pole-changing connections. The hysteresis motor can accelerate and synchronize high-inertia loads because its torque is uniform from standstill to synchronous speed.
3. REVOLVING-FIELD THEORY OF SINGLE-PHASE INDUCTION MOTORS
As discussed in Sect. 1, the stator-mmf wave of a single-phase induction motor can be shown to be equivalent to two constant-amplitude mmf waves revolving at synchronous speed in opposite directions. Each of these component stator-mmf waves induces its own component rotor currents and produces induction-motor action just as in a balanced polyphase motor. This double-revolving-field concept not only is useful for qualitative visualization but also can be developed into a quantitative theory applicable to a wide variety of induction-motor types. We will not discuss the full quantitative theory here. 1 However, we will consider the simpler, but important case of a single-phase induction motor running on only its main winding.
Consider conditions with the rotor stationary and only the main stator winding excited. The motor then is equivalent to a transformer with its secondary short-circuited. The equivalent circuit is shown in FIG. 11 a, where R1,main and X 1,main are, respectively, the resistance and leakage reactance of the main winding, Xm, main is the magnetizing reactance, and R2, main and X2,main are the standstill values of the rotor resistance and leakage reactance referred to the main stator winding by use of the appropriate turns ratio. Core loss, which is omitted here, will be accounted for later as if it were a rotational loss. The applied voltage is f', and the main-winding current is I_main. The voltage J_main is the counter emf generated in the main winding by the stationary pulsating air-gap flux wave produced by the combined action of the stator and rotor currents.
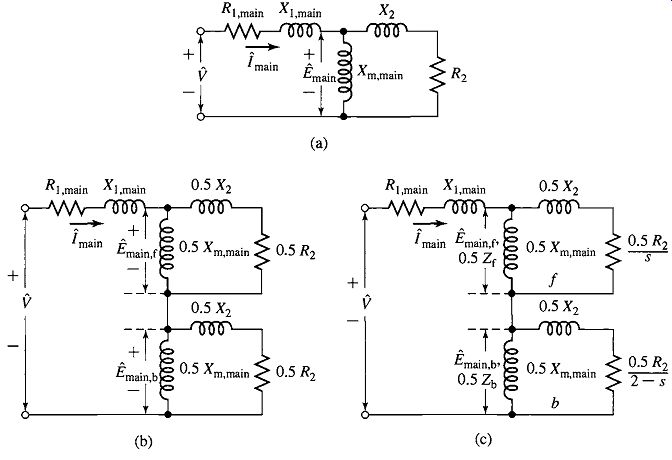
FIG. 11 Equivalent circuits for a single-phase induction motor: (a)
rotor blocked (b) rotor blocked, showing effects of forward and backward
fields; (c) running conditions.
In accordance with the double-revolving-field concept of Sect. 1, the stator mmf can be resolved into half-amplitude forward and backward rotating fields. At standstill the amplitudes of the forward and backward resultant air-gap flux waves both equal half the amplitude of the pulsating field. In FIG. 11 b the portion of the equivalent circuit representing the effects of the air-gap flux is split into two equal portions, representing the effects of the forward and backward fields, respectively.
Now consider conditions after the motor has been brought up to speed by some auxiliary means and is running on only its main winding in the direction of the forward field at a per-unit slip s. The rotor currents induced by the forward field are of slip frequency sfe, where fe is the stator applied electrical frequency. Just as in any polyphase motor with a symmetric polyphase or squirrel-cage rotor, these rotor currents produce an mmf wave traveling forward at slip speed with respect to the rotor and therefore at synchronous speed with respect to the stator. The resultant of the forward waves of stator and rotor mmf creates a resultant forward wave of air-gap flux, which generates a counter emf J_main, f in the main winding of the stator. The reflected effect of the rotor as viewed from the stator is like that in a polyphase motor and can be represented by an impedance 0.5R2,main/S Jr j0.5X2, main in parallel with j0.5Xm,main as in the portion of the equivalent circuit of FIG. 1 lc labeled 'f'. The factors of 0.5 come from the resolution of the pulsating stator mmf into forward and backward components.
Now consider conditions with respect to the backward field. The rotor is still turning at a slip s with respect to the forward field, and its per-unit speed n in the direction of the forward field is n = 1 s. The relative speed of the rotor with respect to the backward field is 1 + n, or its slip with respect to the backward field is 1 + n = 2 s. The backward field then induces rotor currents whose frequency is (2 s)fe. For small slips, these rotor currents are of almost twice stator frequency.
At a small slip, an oscilloscope trace of rotor current will therefore show a high-frequency component from the backward field superposed on a low-frequency component from the forward field. As viewed from the stator, the rotor-mmf wave of the backward-field induced rotor current travels at synchronous speed but in the backward direction. The equivalent-circuit representing these internal reactions from the viewpoint of the stator is like that of a polyphase motor whose slip is 2 s and is shown in the portion of the equivalent circuit (FIG. 11c) labeled 'b'. As with the forward field, the factors of 0.5 come from the resolution of the pulsating stator mmf into forward and backward components. The voltage J~main,b across the parallel combination representing the backward field is the counter emf generated in the main winding of the stator by the resultant backward field.
By use of the equivalent circuit of FIG. 11 c, the stator current, power input, and power factor can be computed for any assumed value of slip when the applied voltage and the motor impedances are known. To simplify the notation, let
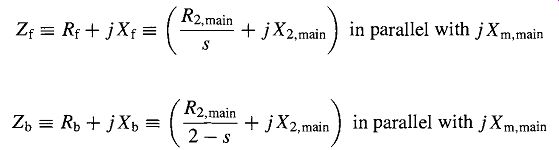
(Eq. 4)
(Eq. 5)
The impedances representing the reactions of the forward and backward fields from the viewpoint of the single-phase main stator winding are 0.5Zf and 0.5Zb, respectively, in FIG. 11 c.
Examination of the equivalent circuit (FIG. 11c) confirms the conclusion, reached by qualitative reasoning in Sect. 1 (FIG. 2b), that the forward airgap flux wave increases and the backward wave decreases when the rotor is set in motion. When the motor is running at a small slip, the reflected effect of the rotor resistance in the forward field, 0.5 R2,main/S, is much larger than its standstill value, while the corresponding effect in the backward field, 0.5R2,main/(2 s), is smaller.
The forward-field impedance therefore is larger than its standstill value, while that of the backward field is smaller. The forward-field counter emf Emain, f therefore is larger than its standstill value, while the backward-field counter emf /~main,b is smaller; i.e., the forward air-gap flux wave increases, while the backward flux wave decreases.
Mechanical power and torque can be computed by application of the torque and power relations developed for polyphase motors in Section 6. The torques produced by the forward and backward fields can each be treated in this manner. The interactions of the oppositely rotating flux and mmf waves cause torque pulsations at twice stator frequency but produce no average torque.
[...]
Examination of the order of magnitude of the numerical values in Example 2 suggests approximations which usually can be made. These approximations pertain particularly to the backward-field impedance. Note that the impedance 0.5(Rb + j Xb) is only about 5 percent of the total motor impedance for a slip near full load.
Consequently, an approximation as large as 20 percent of this impedance would cause only about 1 percent error in the motor current. Although, strictly speaking, the backward-field impedance is a function of slip, very little error usually results from computing its value at any convenient slip in the normal running region, e.g., 5 percent, and then assuming Rb and Xb to be constants.
Corresponding to a slightly greater approximation, the shunting effect of j Xm, main on the backward-field impedance can often be neglected, whence

(Eq. 15)
This equation gives values of the backward-field resistance that are a few percent high, as can be seen by comparison with the exact expression given in Example 2.
Neglecting s in Eq. 9.15 would tend to give values of the backward-field resistance that would be too low, and therefore such an approximation would tend to counteract the error in Eq. 9.15. Consequently, for small slips

(Eq. 16)
In a polyphase motor (Section 6.5), the maximum internal torque and the slip at which it occurs can easily be expressed in terms of the motor parameters; the maximum internal torque is independent of rotor resistance. No such simple expressions exist for a single-phase motor. The single-phase problem is much more involved because of the presence of the backward field, the effect of which is twofold: (1) it absorbs some of the applied voltage, thus reducing the voltage available for the forward field and decreasing the forward torque developed; and (2) the backward field produces negative torque, reducing the effective developed torque. Both of these effects depend on rotor resistance as well as leakage reactance. Consequently, unlike the polyphase motor, the maximum internal torque of a single-phase motor is influenced by rotor resistance; increasing the rotor resistance decreases the maximum torque and increases the slip at which maximum torque occurs.
Principally because of the effects of the backward field, a single-phase induction motor is somewhat inferior to a polyphase motor using the same rotor and the same stator core. The single-phase motor has a lower maximum torque which occurs at a lower slip. For the same torque, the single-phase motor has a higher slip and greater losses, largely because of the backward-field rotor 12R loss. The volt-ampere input to the single-phase motor is greater, principally because of the power and reactive volt-amperes consumed by the backward field. The stator 12R loss also is somewhat higher in the single-phase motor, because one phase, rather than several, must carry all the current. Because of the greater losses, the efficiency is lower, and the temperature rise for the same torque is higher. A larger frame size must be used for a single-phase motor than for a polyphase motor of the same power and speed rating. Because of the larger frame size, the maximum torque can be made comparable with that of a physically smaller but equally rated polyphase motor. In spite of the larger frame size and the necessity for auxiliary starting arrangements, general-purpose single-phase motors in the standard fractional-kilowatt ratings cost approximately the same as correspondingly rated polyphase motors because of the much greater volume of production of the former.
4. TWO-PHASE INDUCTION MOTORS
As we have seen, most single-phase induction motors are actually constructed in the form of two-phase motors, with two stator windings in space quadrature. The main and auxiliary windings are typically quite different, with a different number of turns, wire size, and turns distribution. This difference, in combination with the capacitor that is typically used in series with the auxiliary winding, guarantees that the mmfs produced by the two winding currents will be quite unbalanced; at best they may be balanced at one specific operating point. We will thus discuss various analytical techniques for two-phase motors, both to expand our understanding and insight into machine performance and also to develop techniques for the analysis of single- and two-phase motors.
Under balanced operating conditions, a symmetrical two-phase motor can be analyzed using techniques developed in Section 6 for three-phase motors, modified only slightly to take into account the fact that there are two phases rather than three.
In this section, we will first discuss one technique that can be used to analyze a symmetrical two-phase motor operating under unbalanced operating conditions. We will then formally derive an analytical model for an unsymmetrical two-phase motor that can be applied to the general case single-phase motors operating off both their main and auxiliary windings.
4.1 Unbalanced Operation of Symmetrical Two-Phase Machines; The Symmetrical-Component Concept
When operating from the main winding alone, the single-phase motor is the extreme case of a motor operating under unbalanced stator-current conditions. In some cases, unbalanced voltages or currents are produced in the supply network to a motor, e.g., when a line fuse is blown. In other cases, unbalanced voltages are produced by the starting impedances of single-phase motors, as described in Sect. 2. The purpose of this section is to develop the symmetrical-component theory of two-phase induction motors from the double-revolving-field concept and to show how the theory can be applied to a variety of problems involving induction motors having two stator windings in space quadrature.
First consider in review what happens when balanced two-phase voltages are applied to the stator terminals of a two-phase machine having a uniform air gap, a symmetrical polyphase or cage rotor, and two identical stator windings ot and fl in space quadrature. The stator currents are equal in magnitude and in time quadrature.
When the current in winding ot is at its instantaneous maximum, the current in winding fl is zero and the stator-mmf wave is centered on the axis of winding or. Similarly, the stator-mmf wave is centered on the axis of winding fl at the instant when the current in winding fl is at its instantaneous maximum. The stator-mmf wave therefore travels 90 electrical degrees in space in a time interval corresponding to a 90 ° phase change of the applied voltage, with the direction of its travel depending on the phase sequence of the currents. A more complete analysis in the manner of Section 4.5 shows that the traveling wave has constant amplitude and constant angular velocity. This fact is, of course, the basis for the theory of the balanced operation of induction machines.
The behavior of the motor for balanced two-phase applied voltages of either phase sequence can be readily determined. Thus, if the rotor is turning at a slip s in the direction from winding alpha toward winding r, the terminal impedance per phase is given by the equivalent circuit of FIG. 12a when the applied voltage fz~ lags the applied voltage fed by 90 ° . Throughout the rest of this treatment, this phase sequence is called positive sequence and is designated by the subscript 'f' since positive-sequence currents result in a forward field. With the rotor running at the same speed and in the same direction, the terminal impedance per phase is given by the equivalent circuit of FIG. 12b when fz~ leads fed by 90 °. This phase sequence is called negative sequence and is designated by subscript 'b', since negative-sequence currents produce a backward field.
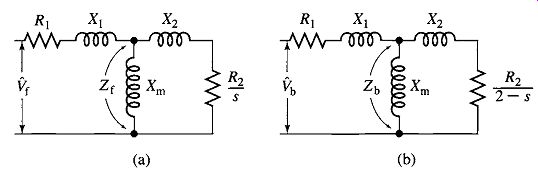
FIG. 12 Single-phase equivalent circuits for a two-phase motor under
unbalanced conditions (a) forward field and (b) backward field.
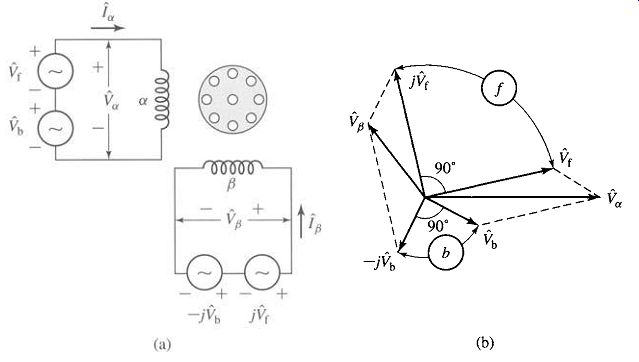
FIG. 13 Synthesis of an unbalanced two-phase system from the sum of
two balanced systems of opposite phase sequence.
Suppose now that two balanced two-phase voltage sources of opposite phase sequence are connected in series and applied simultaneously to the motor, as indicated in FIG. 13a, where phasor voltages Vf and j Vf applied, respectively, to windings ot and fl form a balanced system of positive sequence, and phasor voltages "V'b and -j l?b form another balanced system but of negative sequence.
The resultant voltage V,~ applied to winding ct is, as a phasor,

(Eq. 17)
...and that applied to winding fl is...
(Eq. 18)
FIG. 13b shows a generalized phasor diagram in which the forward, or positivesequence, system is given by the phasors ~'r and j l~'r and the backward, or negativesequence, system is given by the phasors ~'b and -j ~'b. The resultant voltages, given by the phasors 12~ and V/~ are not, in general, either equal in magnitude or in time quadrature. From this discussion we see that an unbalanced two-phase system of applied voltages V~ and V# can be synthesized by combining two balanced voltage sets of opposite phase sequence.
The symmetrical-component systems are, however, much easier to work with than their unbalanced resultant system. Thus, it is easy to compute the component currents produced by each symmetrical-component system of applied voltages because the induction motor operates as a balanced two-phase motor for each component system.
By superposition, the actual current in a winding then is the sum of its components. Thus, if if and Ib are, respectively, the positive- and negative-sequence component phasor currents in winding or, then the corresponding positive- and negative-sequence component phasor currents in winding fl are, respectively, jif and -j ib, and the actual winding currents i~ and i# are
[...]
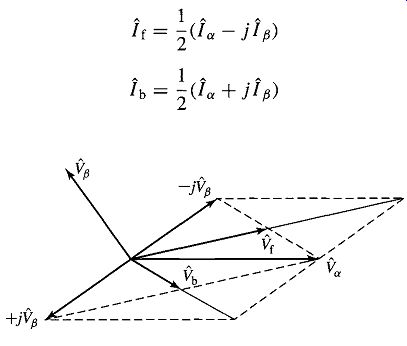
FIG. 14 Resolution of unbalanced two-phase voltages into symmetrical
components.
4.2 The General Case: Unsymmetrical Two-Phase Induction Machines
As we have discussed, a single-phase induction motor with a main and auxiliary winding is an example of an unsymmetrical two-phase induction motor. In this section we will develop a model for such a two-phase motor, using notation appropriate to the single-phase motor. We will assume, as is commonly the case, that the windings are in space quadrature but that they are unsymmetrical in that they may have a different number of turns, a different winding distribution, and so on.
Our analytical approach is to represent the rotor by an equivalent two-phase winding as shown in schematic form in FIG. 16 and to start with flux-linkage/current relationships for the rotor and stator of the form

(Eq. 25)
where 0me is the rotor angle measured in electrical radians.
Lmain = Self-inductance of the main winding
FIG. 16 Schematic representation of a two-phase induction motor with an equivalent two-phase rotor.
[...]
5. SUMMARY
One theme of this section is a continuation of the induction-machine theory of Section 6 and its application to the single-phase induction motor. This theory is expanded by a step-by-step reasoning process from the simple revolving-field theory of the symmetrical polyphase induction motor. The basic concept is the resolution of the stator mmf wave into two constant-amplitude traveling waves revolving around the air gap at synchronous speed in opposite directions. If the slip for the forward field is s, then that for the backward field is (2 s). Each of these component fields produces induction-motor action, just as in a symmetrical polyphase motor. From the viewpoint of the stator, the reflected effects of the rotor can be visualized and expressed quantitatively in terms of simple equivalent circuits. The ease with which the internal reactions can be accounted for in this manner is the essential reason for the usefulness of the double-revolving-field theory.
For a single-phase winding, the forward- and backward-component mmf waves are equal, and their amplitude is half the maximum value of the peak of the stationary pulsating mmf produced by the winding. The resolution of the stator mmf into its forward and backward components then leads to the physical concept of the single-phase motor described in Sect. 1 and finally to the quantitative theory developed in Sect. 3 and to the equivalent circuits of FIG. 11.
In most cases, single-phase induction motors are actually two-phase motors with unsymmetrical windings operated off of a single phase source. Thus to complete our understanding of single-phase induction motors, it is necessary to examine the performance of two-phase motors. Hence, the next step is the application of the double-revolving-field picture to a symmetrical two-phase motor with unbalanced applied voltages, as in Sect. 4.1. This investigation leads to the symmetrical-component concept, whereby an unbalanced two-phase system of currents or voltages can be resolved into the sum of two balanced two-phase component systems of opposite phase sequence. Resolution of the currents into symmetrical-component systems is equivalent to resolving the stator-mmf wave into its forward and backward components, and therefore the internal reactions of the rotor for each symmetrical-component system are the same as those which we have already investigated. A very similar reasoning process, not considered here, leads to the well-known three-phase symmetrical-component method for treating problems involving unbalanced operation of three-phase rotating machines. The ease with which the rotating machine can be analyzed in terms of revolving-field theory is the chief reason for the usefulness of the symmetrical-component method.
Finally, the section ends in Sect. 4.2 with the development of an analytical theory for the general case of a two-phase induction motor with unsymmetrical windings. This theory permits us to analyze the operation of single-phase motors running off both their main and auxiliary windings.
6. QUIZ
1 A 1-kW, 120-V, 60-Hz capacitor-start motor has the following parameters for the main and auxiliary windings (at starting):
Zmain = 4.82 + j7.25 Zau x --7.95 + j9.21 ohm main winding auxiliary winding
a. Find the magnitude and the phase angles of the currents in the two windings when rated voltage is applied to the motor under starting conditions.
b. Find the value of starting capacitance that will place the main- and auxiliary-winding currents in time quadrature at starting.
c. Repeat part (a) when the capacitance of part (b) is inserted in series with the auxiliary winding.
2. Repeat Problem 1 if the motor is operated from a 120-V, 50-Hz source.
3. Given the applied electrical frequency and the corresponding impedances Zmain and Zaux of the main and auxiliary windings at starting, write a MATLAB script to calculate the value of the capacitance, which, when connected in series with the starting winding, will produce a starting winding current which will lead that of the main winding by 90 ° .
4. Repeat Example 2 for slip of 0.045.
5. A 500-W, four-pole, 115-V, 60-Hz single-phase induction motor has the following parameters (resistances and reactances in ohm/phase):
R1, main = 1.68 R2,main = 2.96
X1, main ~-1.87 Xm, main = 60.6 X2,main = 1.72
Core loss = 38 W
Friction and windage = 11.8 W
Find the speed, stator current, torque, power output, and efficiency when the motor is operating at rated voltage and a slip of 4.2 percent.
6. Write a MATLAB script to produce plots of the speed and efficiency of the single-phase motor of Problem 5 as a function of output power over the range 0 < Pout < 500 W.
7. At standstill the rms currents in the main and auxiliary windings of a four-pole, capacitor-start induction motor are/main = 20.7 A and laux = 11.1 A respectively. The auxiliary-winding current leads the main-winding current by 53 ° . The effective turns per pole (i.e., the number of turns corrected for the effects of winding distribution) are N_main -42 and N_aux = 68. The windings are in space quadrature.
a. Determine the peak amplitudes of the forward and backward stator-mmf waves.
b. Suppose it were possible to adjust the magnitude and phase of the auxiliary-winding current. What magnitude and phase would produce a purely forward mmf wave? 9.8 Derive an expression in terms of a2,main for the nonzero speed of a single-phase induction motor at which the internal torque is zero. (See Example 2.)
9. The equivalent-circuit parameters of an 8-kW, 230-V, 60-Hz, four-pole, two-phase, squirrel-cage induction motor in ohms per phase are Rl = 0.253 Xl = 1.14 Xm = 32.7 R2 = 0.446 X2 = 1.30 This motor is operated from an unbalanced two-phase, 60-Hz source whose phase voltages are, respectively, 223 and 190 V, the smaller voltage leading the larger by 73 °. For a slip of 0.045, find:
a. the phase currents in each of the windings and
b. the internal mechanical power.
10. Consider the two-phase motor of Example 3.
a. Find the starting torque for the conditions specified in the example.
b. Compare the result of part (a) with the starting torque which the motor would produce if 220-V, balanced two-phase voltages were applied to the motor.
c. Show that if the stator voltages f'~ and V_beta of a two-phase induction motor are in time quadrature but unequal in magnitude, the starting torque is the same as that developed when balanced two-phase voltages of magnitude v/V~ V~ are applied.
11. The induction motor of Problem 9 is supplied from an unbalanced two-phase source by a four-wire feeder having an impedance Z = 0.32 + j 1.5 ohm/phase. The source voltages can be expressed as fe d -235L0 ° f'~ = 212/78 ° For a slip of 5 percent, show that the induction-motor terminal voltages correspond more nearly to a balanced two-phase set than do those of the source.
12. The equivalent-circuit parameters in ohms per phase referred to the stator for a two-phase, 1.0 kW, 220-V, four-pole, 60-Hz, squirrel-cage induction motor are given below. The no-load rotational loss is 65 W. R1 = 0.78 R2 = 4.2 X1 = X2 = 5.3 Xm = 93
a. The voltage applied to phase c~ is 220L0 ° V and that applied to phase/3 is 220L65 ° V. Find the net air-gap torque at a slip s = 0.035.
b. What is the starting torque with the applied voltages of part (a)?
c. The applied voltages are readjusted so that f'~ 220L65 ° V and f't~ -220L90° V.
Full load on the machine occurs at s = 0.048. At what slip does maximum internal torque occur? What is the value of the maximum torque?
d. While the motor is running as in part (c), phase fl is open-circuited. What is the power output of the machine at a slip s = 0.04?
e. What voltage appears across the open phase-fl terminals under the conditions of part (d)?
13. A 120-V, 60-Hz, capacitor-run, two-pole, single-phase induction motor has the following parameters: Lmain = 47.2 mH
Rmain = 0.38
Laux = 102 mH
Raux -1.78 ohm
Lr = 2.35/zH
Rr = 17.2/zohm
Lmain,r -0.342 mH
Laux,r = 0.530 mH
You may assume that the motor has 48 W of core loss and 23 W of rotational losses. The motor windings are connected with the polarity shown in FIG. 17 with a 40 #F run capacitor.
a. Calculate the motor starting torque.
With the motor operating at a speed of 3490 r/min, calculate
b. the main and auxiliary-winding currents,
c. the total line current and the motor power factor,
d. the output power and
e. the electrical input power and the efficiency.
Note that this problem is most easily solved using MATLAB.
14. Consider the single-phase motor of Problem 13. Write a MATLAB script to search over the range of capacitor values from 25 uF to 75 uF to find the value which will maximize the motor efficiency at a motor speed of 3490 r/min. What is the corresponding maximum efficiency?
15. In order to raise the starting torque, the single-phase induction motor of Problem 13 is to be converted to a capacitor-start, capacitor-run motor.
Write a MATLAB script to find the minimum value of starting capacitance required to raise the starting torque to 0.5 N-m.
16. Consider the single-phase induction motor of Example 5 operating over the speed range 3350 r/min to 3580 r/min.
a. Use MATLAB to plot the output power over the given speed range.
b. Plot the efficiency of the motor over this speed range.
c. On the same plot as that of part (b), plot the motor efficiency if the run capacitor is increased to 45 uF.