AMAZON multi-meters discounts AMAZON oscilloscope discounts
Section 15 dealt with the equipment used for electrical power control. Now, the operational power control systems will be discussed in this section. Some specific applications of the equipment and devices that were glossed over in Section 15 are further investigated below.
TERMINOLOGY
This section deals with operational power control systems. After studying this section, you should have an understanding of the following terms:
- Start-Stop Pushbutton
- Normally Open (NO) Pushbutton
- Normally Closed (NC) Pushbutton
- Overload Protection
- Jogging
- Limit Switch
- High-Low Speed Selection
- Magnetic Contactor
- Full-Voltage Starting
- Primary Resistance Starting
- Primary Reactor Starting
- Wye-Delta Starting
- Autotransformer Starting
- Part-Winding Starting
- Direct Current (DC) Starting Systems
- Forward-Reverse-Stop Control
- Three-phase Alternating Current (AC) Motors
- Single-phase AC Motors
- DC Motors
- Motor Starting Protection
- Dynamic Braking
- Speed Control Circuits
- Frequency Conversion Systems
- Programmable Logic Controller
BASIC CONTROL SYSTEMS
Electrical power control systems are used with many types of loads.
The most common electrical loads are motors, so our discussion will deal mainly with electric motor control. However, many of the basic control systems are also used to control lighting and heating loads. Generally, the controls for lighting and heating loads are less complex.
Several power control circuits are summarized in FIGs 1 through 9. FIG 1 is a start-stop pushbutton control circuit with overload protection (OL). Notice that the "start" pushbutton is normally open (NO), and the "stop" pushbutton is normally closed (NC). Single-phase lines L1 and L2 are connected across the control circuit. When the start pushbutton is pushed, a momentary contact is made between points 2 and 3. This causes the NO contact (M) to close. A complete circuit between L1 and L2 results, which causes the electromagnetic coil M to be energized. When the NC stop pushbutton is pressed, the circuit between L1 and L2 will open.
This causes contact M to open and turn the circuit off.
The circuit of FIG 2 is the same type of control as the circuit given in FIG 1. In the circuit of FIG 2, the start-stop control of a load can be accomplished from three separate locations. Notice that the start pushbuttons are connected in parallel, and the stop pushbuttons are connected in series. The control of one load, from as many locations as is desired, can be accomplished with this type of control circuit.
The next circuit ( FIG 3) is the same as the circuit in FIG 1, except that a "safe-run" switch is provided. The "safe" position assures that the start pushbutton won’t activate the load. A "start-safe" switch circuit often contains a key, which the machine operator uses to turn the control circuit on or off.
FIG 4 is also like the circuit of FIG 1, but with a "jog-run" switch added in series with the NO contact (M). In the "run" position, the circuit will operate just like the circuit of FIG 1. The "jog" position is used so that a complete circuit between L1 and L2 will be achieved and sustained only while the start pushbutton is pressed. With the selector switch in the "jog" position, a motor can be rotated a small amount at a time, for positioning purposes. Jogging or inching is defined as the momentary operation of a motor to provide small movements of its shaft.
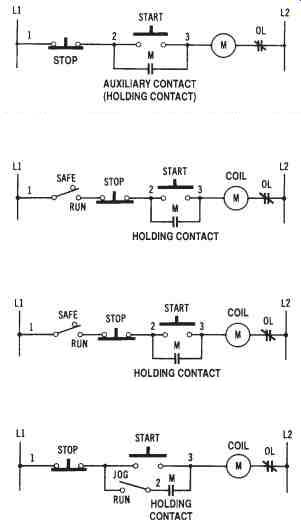
FIG 1. A start-stop pushbutton control circuit with overload
protection (one-line diagram) FIG 2. A start-stop control circuit
with low-voltage protection and control from three locations FIG
3. A start-stop control circuit with a safe-run selector switch
FIG 4. A start-stop pushbutton control circuit with a jog-run selector
switch.
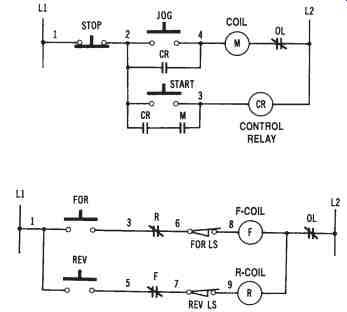
FIG 5. A pushbutton control circuit for start-stop-jogging; FIG
6. A forward-reverse pushbutton control circuit with forward
and re verse limit switches
FIG 5 shows a circuit that is another method of motor-jogging control. This circuit has a separate pushbutton (which relies upon an NO contact [CR] to operate) for jogging. Two control relays are used with this circuit.
The circuit in FIG 6 is a forward-reverse pushbutton control circuit with both forward and reverse limit switches (normally closed switches). When the "forward" pushbutton is pressed, the load will operate until the "forward" limit switch is actuated. The load will then be turned off, since the circuit from L1 to L2 will be opened. The reverse circuit operates in a similar manner. Two control relays are needed for forward-reverse operation.
The circuit of FIG 7 is the same as the circuit in FIG 6, except for the pushbutton arrangement. The forward and reverse pushbuttons are arranged in sets. Pressing the "forward" pushbutton automatically opens the reverse circuit, and pressing the "reverse" pushbutton automatically opens the forward circuit. Limit switches are also used with this circuit. Their function is the same as in the circuit shown in FIG 6. In the circuit in FIG 7, when the "forward" pushbutton is pressed, the top pushbutton will momentarily close, and the lower pushbutton will momentarily open. When points 2 and 3 are connected, current will flow from L1 to L2 through coil F. When coil F is energized, NO contact F will close, and the NC contact F will open. The "forward" coil will then remain energized. The reverse pushbuttons cause similar actions of the reversing circuit. Two control relays are also required in this case.
The circuit of FIG 8 is similar in function to the circuit in FIG 7. The pushbutton arrangement of this circuit is simpler. When the NO forward pushbutton is pressed, current will flow through coil F. When the forward control relay is energized, NO contact F will close, and NC contact F will open. This action will cause a motor to operate in the forward direction. When the NC stop pushbutton is pressed, the current through coil F is interrupted. When the NO reverse pushbutton is pressed, current will flow through coil R. When the reverse coil is energized, NO contact F will close, and NC contact F will open. This action will cause a motor to operate in the reverse direction, until the stop pushbutton is pressed again.
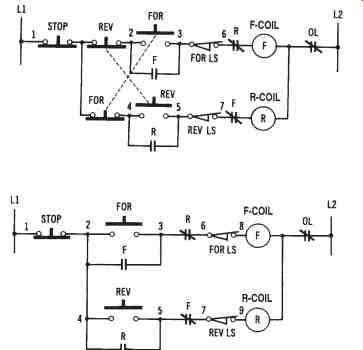
FIG 7. An instant forward-reverse-stop pushbutton control circuit; FIG
8. A forward-reverse-stop pushbutton control circuit
FIG 9 shows a circuit that is another method of forward-re verse-stop control. This control circuit has the added feature of a high- and low-speed selector switch for either the forward or reverse direction. The selector switch is placed in series with the windings of the motor. When the selector is changed from the HIGH position to the LOW position, a modification in the windings of the motor is made.
There are many other pushbutton combinations that can be used with control relays to accomplish motor control, or control of other types of loads. The circuits discussed in this section represent some basic power control functions, such as start-stop, forward-reverse-stop, jogging, and multiple-speed control.
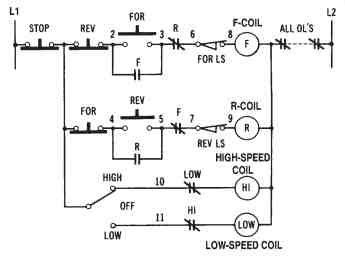
FIG 9. Pushbutton control circuit with a high- and low-speed
selector switch
MOTOR-STARTING SYSTEMS
The equipment used with motor-starting systems was studied in Section 15. Some specific systems used for starting electric motors are discussed in this section.
Function of Magnetic Contactors
Most motor-starting systems utilize one or more magnetic contactors. A schematic diagram of a magnetic contactor circuit used for control-ling a single-phase motor is shown in FIG 10. Note that a magnetic contactor relies upon an electromagnetic coil, which energizes when cur rent passes through it. The activated coil performs the function of closing a set of normally open contacts. These contacts are connected in series with the power input to the motor that is being controlled.
In FIG 10, the START pushbutton switch is an NO switch. When the start switch is pressed, current will flow through the coil of the magnetic contactor. This action energizes the coil, and the solenoid of the contactor is drawn inward to close the contacts, which are in series with the power lines. Once these contacts are closed, current will continue to flow through the electromagnetic coil through the holding contacts. Current will continue to flow until the STOP pushbutton switch is pressed. The stop switch is an NC switch. When it’s pressed, the circuit to the electro magnetic coil is broken. At this time, current no longer flows through the coil. The contacts now release and cause the flow of current through the power lines to be interrupted. Thus, the motor will be turned off. Magnetic contactor circuits are sometimes referred to as across-the-line starters. The relay principle is utilized, since a small current through the coil controls a larger current through a motor.
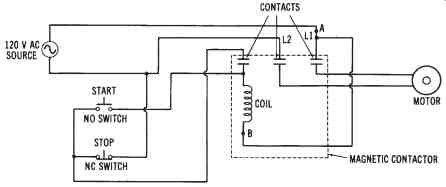
FIG 10. Magnetic contactor motor control circuit (Schematic diagram)
Types of Starting Systems
Motor starting, particularly for large motors, can play an important role in the efficient operation of an electrical power system. There are several systems used to start electric motors. The motor-starting equipment that is used is placed between the electrical power source and the motor.
Electric motors draw a larger current from the power lines during starting than during normal operation. Motor-starting equipment should attempt to reduce starting currents to a level that can be handled by the electrical power system where they are being used.
Full-voltage Starting--One method of starting electric motors is called full-voltage starting. This method is the least expensive and the simplest to install. Since full power-supply voltage is applied to the motor initially, maximum starting torque and minimum acceleration time result.
However, the power system must be able to handle the starting current drawn by the motor.
Full-voltage starting is illustrated by the diagram in FIG 11. In this power control circuit, a start-stop pushbutton station is used to control a three-phase motor. When the NO start pushbutton is pressed, cur rent will flow through the relay coil (M), causing the NO contacts to close.
The line contacts allow full voltage to be applied to the motor when they are closed. When the start pushbutton is released, the relay coil remains energized, because of the holding contact. This contact provides a current path from L1 through the NC stop pushbutton, through the holding con tact, through the coil (M), through a thermal overload relay, and back to L2. When the stop pushbutton is pressed, this circuit is opened, causing the coil to be de-energized.
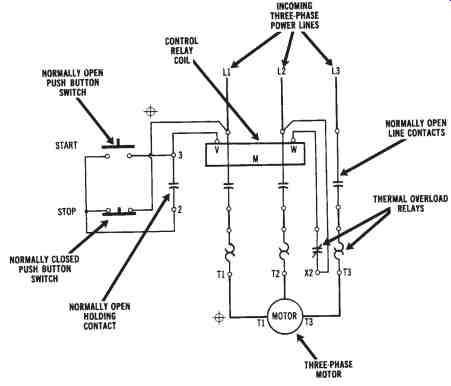
FIG 11. Full-voltage starting circuit for a three-phase motor.
Primary Resistance Starting--Another motor starting method is called primary resistance starting. This method uses resistors in series with the power lines to reduce the motor-starting current. Ordinarily, the resistance connected into the power lines may be reduced in steps until full voltage is applied to the motor. Thus, starting current is reduced according to the value of series resistance in the power lines. Since starting torque is directly proportional to the current flow, starting torque is reduced ac cording to the magnitude of current flow.
OPERATIONAL POWER CONTROL SYSTEMS
FIG 12 shows the primary resistance starting method used to control a three-phase motor. When the start pushbutton is pressed, coils Sand TR are energized. Initially, the start contacts (S) will close, applying voltage through the primary resistors to the motor. These resistors reduce the value of starting current. Once the time delay period of timing relay TR has elapsed, contact TR will close. The run contacts (R) will then close and apply full voltage to the motor. Notice that a step-down transformer is used for applying voltage to the control portion of the circuit. This is a commonly used technique for reducing the voltage applied to the relay coils.
Primary Reactor Starting--Another method, similar to primary resistance starting, is called the primary reactor starting method. Reactors (coils) are used in place of resistors, since they consume smaller amounts of power from the AC source. Usually, this method is more appropriate for large motors that are rated at 600 volts.
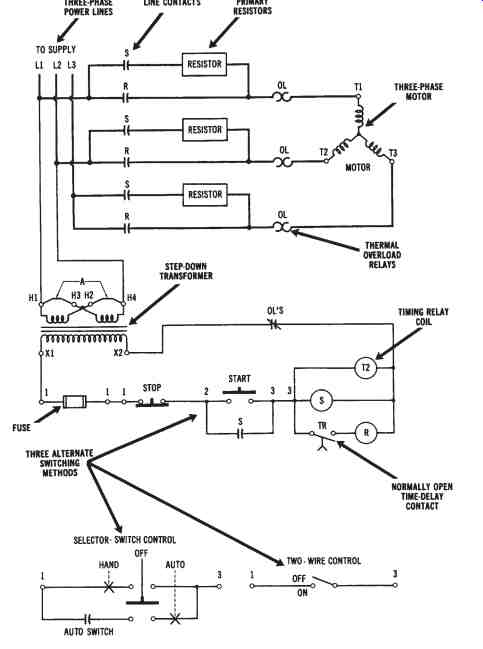
FIG 12. Primary resistance starter circuit
Autotransformer Starting--Autotransformer starting is another method used to start electric motors. This method employs one or more autotransformers to control the voltage that is applied to a motor. The auto transformers used are ordinarily tapped to provide a range of starting-cur-rent control. When the motor has accelerated to near its normal operating speed, the autotransformer windings are removed from the circuit. A major disadvantage of this method is the expense of the autotransformers.
An autotransformer starting circuit is shown in FIG 13. This is an expensive type of control that uses three autotransformers and four relays. When the start pushbutton is pressed, current will flow through coils 1S, 2S, and TR. The 1S and 2S contacts will then close. Voltage will be applied through the autotransformer windings to the three-phase motor. One NC and one NO contact are controlled by timing relay TR. When the specified time period has elapsed, the NC TR contact will open, and the NO TR contact will close. Coil R will then energize, causing the NO R contacts to close and apply full voltage to the motor. NC R contacts are connected in series, with coils 1S, 2S, and TR to open their circuits when coil R is energized.
When the stop pushbutton is pressed, the current to coil R will be interrupted, thus opening the power line connections to the motor.
Notice that the 65 percent taps of the autotransformer are used in FIG 13. There are also taps for 50 percent, 80 percent, and 100 percent, to provide more flexibility in reducing the motor-starting current.
Wye-delta Starting--It’s possible to start three-phase motors more economically by using the wye-delta-starting method. Since, in a wye configuration, line current is equal to the phase current divided by 1.73 (or 3), it’s possible to reduce the starting current by using a wye connection rather than a delta connection. This method, shown in FIG 14, em ploys a switching arrangement that places the motor windings in a wye configuration during starting, and in a delta arrangement for running. In this way, starting current is reduced. Although starting torque is reduced, running torque is still high, since full voltage appears across each winding when the motor is connected in a delta configuration.
In FIG 14, when the start pushbutton is pressed, coil S is energized. The normally open S contacts will close. This action connects the motor windings in a wye (or star) configuration and also activates timing relay TR and coil 1M. The NO 1M contacts then close to apply voltage to the wye-connected motor windings. After the time delay period has elapsed, the TR contacts will change state. Coil S will de-energize, and coil 2M will energize. The S contacts, which hold the motor windings in a wye arrangement, will then open. The 2M contacts will close and cause the mo tor windings to be connected in a delta configuration. The motor will then continue to run with the motor connected in a delta arrangement.
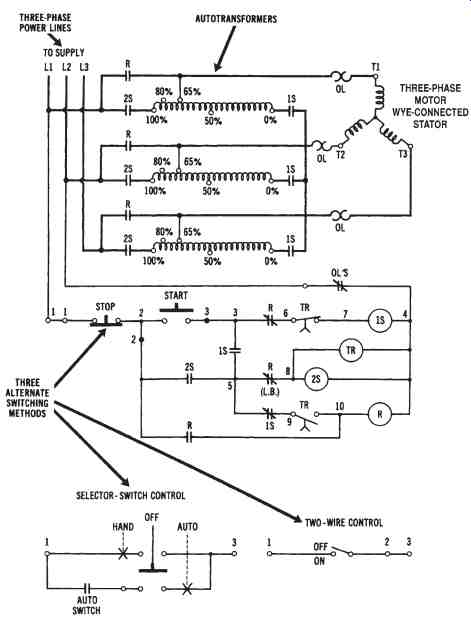
FIG 13. Autotransformer starter circuit used with a three-phase
motor
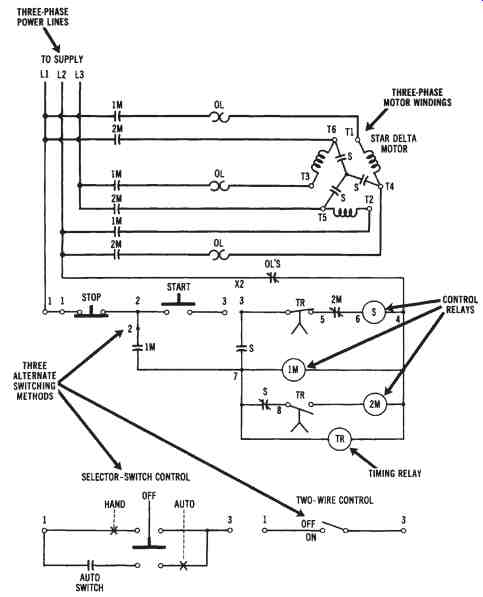
FIG 14. Wye-to-delta three-phase starter circuit.
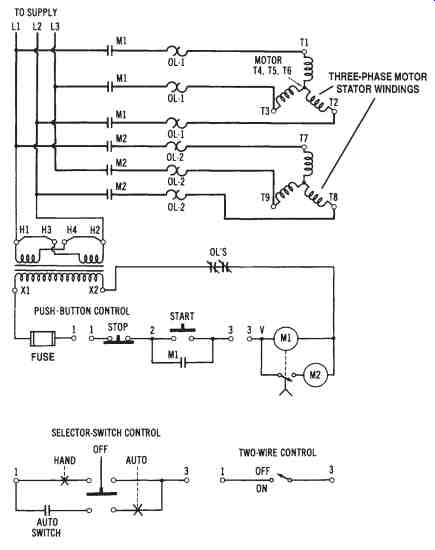
FIG 15. Part-winding circuit for three-phase motor starting.
Part-winding Starting- FIG 15 shows the part-winding starting method, which is usually simpler and less expensive than other starting methods. However, motors must be specifically designed to operate in this manner. During starting, the power-line voltage is applied across only part of the parallel-connected motor windings, thus reducing starting cur rent. Once the motor has started, the line voltage is placed across all of the motor windings. This method is undesirable for many heavy-load applications, because of the reduction of starting torque.
In FIG 15, when the start pushbutton is pressed, current will flow through coil M1 of the time-delay relay. This will cause the NO contacts of M1 to close, and a three-phase voltage will be applied to windings T1, T2, and T3. After the time-delay period has elapsed, the NO contact located below coil M1 in FIG 15 will close. This action energizes coil M2 and causes its NO contacts to close. The M2 contacts then connect the T7, T8, and T9 windings in parallel with the T1, T2, and T3 windings.
When the stop pushbutton is pressed, coils M1 and M2 will be de-energized.
Direct Current Starting Systems--Since DC motors have no counter-electromotive force (cemf) when they are not rotating (see Section 14), they have tremendously high starting currents. Therefore, they must use some type of control system to reduce the initial starting current.
Ordinarily, a series resistance is used. This resistance can be manually or automatically reduced until a full voltage is applied. The four types of control systems commonly used with DC motors are (1) current limit, (2) definite time, (3) counter-emf, and (4) variable voltage. The current-limit method allows the starting current to be reduced to a specified level, and then advanced to the next resistance step. The definite-time method causes the motor to increase speed in timed intervals, with no regard to the amount of armature current or to the speed of the motor. The counter emf method samples the amount of cemf generated by the armature of the motor to reduce the series resistance accordingly. This method can be used effectively, since cemf is proportional to both the speed and the armature current of a DC motor. The variable-voltage method employs a variable DC power source to apply a reduced voltage to the motor initially, and then to gradually increase the voltage. No series resistances are needed when the latter method is used.
SPECIALIZED CONTROL SYSTEMS
Electrical power control is usually desired for some specific application. In this section, we will discuss some common types of specialized, electrical power control systems that are used today.
Forward and Reverse Operation of Motors
Most types of electrical motors can be made to rotate in either forward or reverse direction by some simple modifications of their connections.
Ordinarily, motors require two magnetic contactors to accomplish forward and reverse operation. These contactors are used in conjunction with a set of three pushbutton switches--FORWARD, REVERSE, and STOP. When the FORWARD pushbutton switch is depressed, the forward contactor will be energized. It’s deactivated when the STOP pushbutton switch is depressed.
A similar procedure takes place during reverse operation.
DC Motor Reversing
DC motors can have their direction of rotation reversed by changing either the armature connections, or the field connections to the power source. In FIG 16, a DC shunt-motor-control circuit is shown. When the forward pushbutton is pressed, the F coil will be energized, causing the F contacts to close. The armature circuit is then completed from L1 through the lower F contact, up through the armature, through the upper F contact, and back to L2. Pressing the stop pushbutton will de-energize the F coil.
The direction of rotation of the motor is reversed when the reverse pushbutton is pressed. This is due to the change of the current direction through the armature. Pressing the reverse pushbutton energizes the R coil and closes the R contacts. The armature current path is then from L1 through the lower R contact, down through the armature, through the up per R contact, and back to L2. Pressing the stop button will de-energize the R coil.
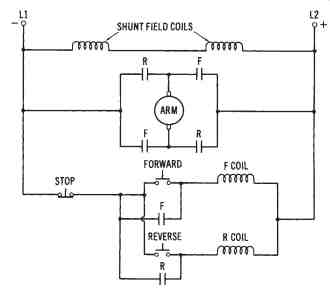
FIG 16. Control circuit for the forward and reverse operation
of a DC shunt motor
Single-phase Induction Motor Reversing
Single-phase AC induction motors that have start and run windings can have their direction of rotation reversed by the circuit in FIG 18.
If we modify the diagram by replacing the shunt field coils with the run windings, and the armature with the start windings, directional reversal of a single-phase AC motor can be accomplished. Single-phase induction motors are reversed by changing the connections of either the start windings or the run windings, but not of both at the same time.
Three-phase Induction-Motor Reversing
Three-phase motors can have their direction of rotation reversed by simply changing the connections of any two power input lines. This changes the phase sequence applied to the motor. A control circuit for three-phase induction-motor reversing is shown in FIG 17.
When the forward pushbutton is pressed, the forward coil will energize and close the F contacts. The three-phase voltage is applied from L1 to T1, L2 to T2, and L3 to T3, to cause the motor to operate. The stop pushbutton de-energizes the forward coil. When the reverse pushbutton is pressed, the reverse coil is energized, and the R contacts will close. The voltage is then applied from L1 to T3, L2 to T2, and L3 to T1. This action reverses the L1 and L3 connections to the motor, and causes the motor to rotate in the reverse direction.
Starting Protection
Overload protection was discussed previously. Protection of expensive electric motors is necessary to extend the lifetime of these machines.
The cost of overload protection is small compared to the cost of replacing large electric motors. Motors present unique problems for protection since their starting currents are much higher than their running currents during normal operation. Solid-state overload protection and microprocessor based monitoring systems are now available to provide motor protection.
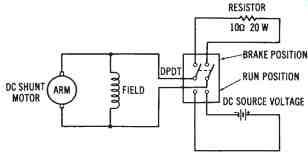
FIG 17. Control circuit for the forward and reverse operation
of a three phase AC induction motor
Dynamic Braking
When a motor is turned off, its shaft will continue to rotate for a short period of time. This continued rotation is undesirable for many applications. Dynamic braking is a method used to bring a motor to a quick stop whenever power is turned off. Motors with wound armatures utilize a resistance connected across the armature as a dynamic braking method.
When power is turned off, the resistance is connected across the armature.
This causes the armature to act as a loaded generator, making the mo tor slow down immediately. This dynamic braking method is shown in FIG 18.
AC induction motors can be slowed down rapidly by placing a DC voltage across the winding of the motor. This DC voltage sets up a constant magnetic field, which causes the rotor to slow down rapidly. A circuit for the dynamic braking of a single-phase AC induction motor is shown in FIG 19.
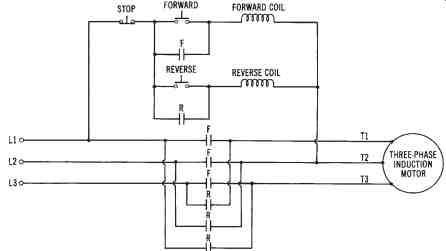
FIG 18. Dynamic braking circuit for a DC shunt motor.
Universal Motor Speed Control
An important advantage of a universal AC/DC motor is the ease of speed control. The universal motor has a brush/commutator assembly, with the armature circuit connected in series with the field windings. By varying may be varied from zero to maximum.
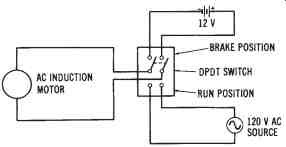
FIG 19. Dynamic braking circuit for a single-phase AC induction motor.
The circuit used for this purpose, shown in FIG 20 uses a gate controlled triac. The triac is a semiconductor device whose conduction may be varied by a trigger voltage applied to its gate. A silicon-controlled rectifier (SCR) could also be used as a speed-control device for a universal motor. Speed-control circuits like this one are used for many applications, such as electric drills, sewing machines, electric mixers, and industrial applications.
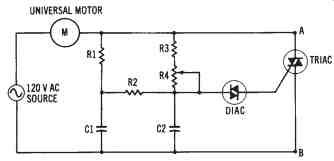 FIG 20. Speed control circuit for a universal motor
FIG 20. Speed control circuit for a universal motor
FREQUENCY-CONVERSION SYSTEMS
The power system frequency used in the United State is 60 hertz, or 60 cycles per second. However, there are specific applications that require other frequencies in order to operate properly. Mechanical frequency converters may be used to change an incoming frequency into some other frequency. Frequency converters are motor/generator sets that are connected together, or solid-state variable frequency drives.
For example, a frequency of 60 Hz could be applied to a synchro nous motor that rotates at a specific speed. A generator connected to its shaft could have the necessary number of poles to cause it to produce a frequency of 25 Hz. Recall that frequency is determined by the following relationship:
Freq. (Hz) = [Speed of Rotation (rpm) × No. of poles] / 120
A frequency-conversion system is shown in FIG 21. Synchronous units, such as the one shown, are used wherever precise frequency control is required. It’s also possible to design units that are driven by induction motors, if some frequency variation can be tolerated. Variable frequency drives are now being used to control many types of industrial machinery. They are used because they are not as expensive as variable speed controllers have been in the past. Solid-state variable frequency drives are used to control overhead cranes, hoists, and many other types of industrial equipment that operate from AC power lines. Variable speed can be accomplished less expensively, in most cases, with solid-state drives than with DC motors or electromechanical variable-frequency drives. Solid state drives can be used with AC induction motors to change their speed by varying the input frequency to the motor. There are fewer maintenance problems with AC induction motors than with DC motors. In addition, fewer electromechanical parts are involved in the control operation; thus, equipment has a longer life expectancy.
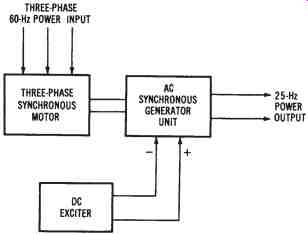
FIG 21. A 60 hertz to 25 hertz frequency conversion system
PROGRAMMABLE LOGIC CONTROLLERS (PLCs)
For a number of years, industrial control was achieved by electro mechanical devices, such as relays, solenoid valves, motors, linear actuators, and timers. These devices were used to control large production machines where only switching operations were necessary. Most controllers were used simply to turn the load device on or off. In addition, some basic logic functions could also be achieved. Production line sequencing operations were achieved by motor-driven drum controllers with timers. As a rule, nearly all electromagnetic controllers were hardwired into the system, and responded as permanent fixtures. Modification of the system was rather difficult to accomplish and somewhat expensive. In industries where production changes were frequent, this type of control was rather costly. It was, however, the best way-and in many cases the only way-that control could be effectively achieved with any degree of success.
In the late 1960s, solid-state devices and digital electronics began to appear in controllers. These innovations were primarily aimed at replacing the older electromechanical control devices. The transition to solid state electronics has, however, been much more significant than expect ed. The use of solid-state electronic devices, digital logic integrated circuits (ICs), and microprocessors has led to the development of programmable logic controllers (PLCs). These devices have capabilities that far exceed the older relay controllers. Programmable logic controllers are extremely flexible, have reduced downtime when making changeovers, occupy very little space, and have improved operational efficiency.
A programmable logic controller is very similar to a small computer. In fact, most programmable logic controllers are classified as dedicated computers. This type of unit is usually designed to perform a number of specific control functions in the operation of a machine or industrial process. The degree of sophistication or "power" of a programmable logic controller is dependent on its application. Many PLCs respond like a computer terminal and interface with a mainframe computer. Other units are completely independent and respond only to those things that are needed to control a specific machine's operation.
Programmable Logic Controller Components
A programmable logic controller is basically a software-based equivalent of the older electromagnetic relay control panel. Essentially, the PLC is a flexible system that can be easily modified and still be used as a general-purpose control device. Most PLCs can be programmed to control a variety of machine functions at one time. When a production change is necessitated, the program can be altered by a keyboard to make the system conform to the needed changes. The new control procedure may be entirely different from the original.
Mini-Programmable Logic Controller Systems
Recent improvements in large-scale IC and power transistor manufacturing technology are responsible for the development of mini-PLCs.
These systems can be used economically to control simple machine operations and numerous manufacturing processes. A number of companies are now producing mini-PLCs.
Mini-PLCs are classified as systems that can economically replace as few as four relays in a control application. They are capable of pro viding timer and counter functions, as well as relay logic, and are small enough to ?t into a standard rack assembly. Most systems of this type have fewer than 32 I/O ports or modules. Some units can be expanded to drive up to 400 I/O devices. Typically, the I/O of this type of system responds to digital signals. Some units are capable of responding to analog information. This makes it possible for the system to respond to temperature, pressure, flow, level, light, weight, and practically any analog control application.
Mini-PLCs, in general, can achieve the same control functions as the larger programmable controllers, only on a smaller basis. Mini-PLCs are usually smaller, less expensive, simpler to use, and rather efficient, compared with mainframe programmable controllers. Mini-units are now beginning to make their way into the PLC field. In the future, these systems will obviously playa greater role in the control of industrial systems.
PROGRAMMING THE PLC
Instructions for the operation of a programmable logic controller are given to the PLC through pushbuttons, a keyboard programmer, magnetic disks, or cassette tape. Each PLC has a special set of instructions and procedures that makes it functional. How the PLC performs is based on the design of its programming procedure. In general, PLCs can be programmed by relay ladder diagrams or logic diagrams. These procedures can be expressed as language words or as symbolic expressions on a CRT display. One manufacturer describes these methods of programming as assembly language and relay language. Assembly language is generally used by the microprocessor of the system. Relay language is a symbolic logic system that employs the relay ladder diagram as a method of programming. This method of programming relies heavily on relay symbols instead of words and letter designations.
Assembly Language
Assembly language is a basic instructional set that is specific to the type of the microprocessor used in the construction of the PLC. For one type of microprocessor, the assembly language program is a combination of mnemonics and labels that the programmer uses to solve a control problem. If the system is programmed directly with binary numbers, the programmer will probably use a lookup table to write the pro gram in assembly language. It’s usually easier to keep track of loops and variables in an assembly language. It’s also easier for others to look at the program when they are trying to see how it works. Ultimately, the programmer must type the coded information into the computer in binary form. This generally means that an assembly language program needs to be translated into binary data before it can be entered. This can be done by laboriously writing down each mnemonic and label, line by line, and then entering the translation into memory. A convenient alter native to this procedure is to have a program that takes lines of assembly language as its input and does the translation for the programmer automatically. A program called "assembler" functionally performs this operation. It actually puts together the operational codes and the addresses that take the place of mnemonics and labels. When the procedure is complete, the assembler has a duplicate of the assembly language in the machine language of the microprocessor. These data can then be entered by the programmer manually, but they are generally applied directly to the input, since it’s in memory when the translation is completed.
Relay Language or Logic
The processor of a programmable logic controller dictates the language and programming procedure to be followed by the system.
Essentially, it’s capable of doing arithmetic and logic functions. It can also store and handle data, and continuously monitor the status of its input and output signals. The resulting output being controlled is based on the response of the signal information being handled by the system.
The processor is generally programmed by a keyboard panel program panel, or CRT terminal.
In a relay language system, the basic element of programming is the relay contact. This contact may be NO or NC. Typically, each contact has a four-digit reference number. This number is used to identify specific contacts being used in the system. The contact is then connected in either series or parallel to form a horizontal rung of a relay ladder diagram.
Once a relay program has been entered into the PLC, it may be monitored on the CRT and modified by a keystroke. Monitoring the operation of a program is achieved by illuminating the current path by making it brighter than the remainder of the circuit components. Modification of the diagram can be achieved by simply placing the cursor of the CRT on the device to be altered, and making the change with a keystroke. Cursor control is achieved by manipulation of the four arrow keys on the right of the keyboard. Contact status can be changed or bypassed, and different outputs can be turned on or off, by this procedure. Each input or output has a four-digit number that can be altered by the numerical data entry part of the keyboard.
All the control components of a PLC are identified by a numbering system. As a rule, each manufacturer has a unique set of component numbers for its system. One manufacturer has a four-digit numbering system for referencing components. The numbers are divided into discrete component references and register references. A discrete component is used to achieve on and off control operations. Limit switches, pushbuttons, relay contacts, motor starters, relay coils, solenoid valves, and solid-state devices are examples of discrete component references.
Registers are used to store some form of numerical data or information.
Timing counts, number counts, and arithmetic data may be stored in register devices. All component references and register references are identified by a numbering system. Each manufacturer has a particular way of identifying system components.
Programming Basics
Programmable logic controllers are provided with the capability to program or simulate the function of relays, timers, and counters.
Programming is achieved on a format of up to 10 elements in each horizontal row or rung of a relay diagram, and up to seven of these rungs may be connected to form a network. A network can be as simple as a single rung, or can be a combination of several rungs, as long as there is some interconnection between the elements of each rung. The left rail of the ladder can be the common connecting element. Each network can have up to seven coils connected in any order to the right rail of the ladder. These coils can be assigned any valid number for identification.
The coil number can only by used once in the operational sequence. The quantity of discrete devices and registers available for use depends on the power or capacity of the system.
When programming a relay ladder diagram into a PLC, the discrete devices and registers are placed in component format. Each component in this case is assigned a four-digit identification number. The specific reference number depends on the memory size of the system. In a low capacity system, number assignments could be 0001 to 0064 for output coils, and 0258 to 0320 for internal coils. A system with a larger capacity might use number assignments of 0001 to 0256 for output coils, and 0258 to 0512 for internal coils. Any coil output or internal coil can only be used once in the system. References to contacts controlled by a specific coil can be used as many times as needed to complete the control operation. Output coils that are not used to drive a specific load can be used internally in the programming procedure.
When the response of a particular input module is programmed, it may be identified as a relay contact. In this regard, the symbol may be a NC contact or a NO contact. The coil or actuating member of the con tact takes on the same numbering assignment as the coil. The coil, how ever, is identified as a circle on the diagram, and the contacts are identified by the standard contact symbol. The contacts can be programmed to achieve either the NO or NC condition, according to their intended functions.
