AMAZON multi-meters discounts AMAZON oscilloscope discounts
.The second type of stepping motor is the variable-reluctance structure in which the rotor is made of non-magnetized soft iron. Such a machine is illustrated in FIG. 11. The salient operating feature is that permanent rotor poles don’t develop. Physically, there are other differences from the permanent-magnet stepping motor. What might initially appear to be error on the part of a not-too-alert draftsman is actually representative of this type of variable-reluctance stepping motor—there are fewer rotor teeth than stator poles. Also, the stator poles have nonuniform widths. These design features help produce steady torque throughout the rotation. These stepping motors are generally equipped with unipolar stator windings, but center taps are not necessary.
At first consideration, it might be a brainteaser to determine the number of degrees the rotor must turn for a full step of rotation. Actually, a similar calculation is used as with permanent-magnet stepping motors. Simply divide 360° by the product of the rotor teeth and the number of pairs of stator windings (each pair of stator windings constitutes a phase). Reduced to numbers, you have:
360 / 8 x 4
… or 15°. Don’t be confused by the momentary life span of the magnetic poles induced in the soft-iron rotor, or by the unequal number of poles in the stator and the rotor. Note also that 15° is the difference in angular pitch between stator and rotor teeth. That is, 60° — 45° = 15°.
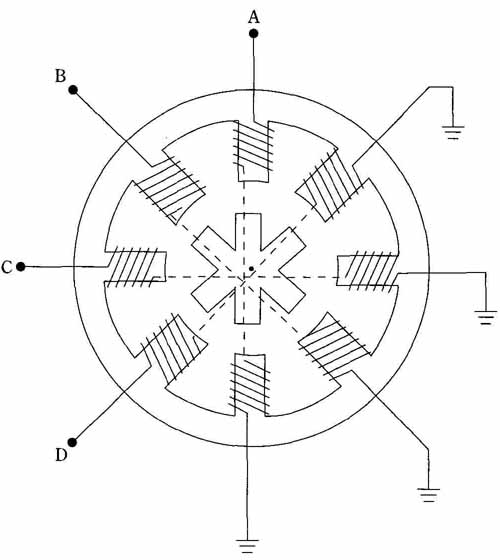
FIG. 11 A variable-reluctance stepping motor. Torque production requires
certain departures from the structures used in the permanent-magnet stepping
motor. Note the variance in the stator poles. Also, it’s seen that there
are fewer rotor than stator poles. Unipolar windings are used in this
example.
The drive logic of the variable-reluctance stepping motor is similar to that of the permanent-magnet types. Because unipolar windings are used on the stator, there are no polarity-reversals in the drive pulses. The three optional phase sequences for producing rotation are as follows: The one-phase on, or wave sequence, is simply A/B/C/D. The two-phase on sequence is AC/CB/BD/DA. These are both full-step sequences. They differ by a half step in the angular displacement of the rotor. By combining these two full-step sequences, you obtain the half-step sequence, A/A C/C/B C/B/BD/D/DA.
An important difference in behavior between permanent-magnet stepping motors and the reluctance type is that the latter don’t posses detente torque, sometimes called “position memory.” That is, the permanent-magnet type, when unenergized, will nonetheless exhibit resistance to movement. In contrast, the unenergized reluctance stepping motor “forgets” its most recently energized position.
There are more complicated variable-reluctance designs than that of FIG. 11. A common structural scheme comprises three ganged rotors all locked to the common shaft. Each such rotor has the same number of teeth as a stator concentric with it. However, each of the rotors is slightly staggered so that the rotor teeth don’t line up. The stator structures have their individual windings. By supplying appropriately sequenced excitation to the three stator windings, one of the rotors will turn in order to attain a position of minimum reluctance. In this way, the motor develops incremental steps of torque, and continuous rotation can be produced.
