AMAZON multi-meters discounts AMAZON oscilloscope discounts
.Inspect the circuitry of FIG. 10. Notice that the logic, as well as the power MOSFET switching bridge, remain essentially the same as in the circuit of FIG. 9. There have obviously been some circuit additions made in FIG. 10, but what is significant is what has been left out. Specifically, the 50-W, 9- current-limiting (and power-wasting) resistance has been omitted in FIG. 10. It’s no longer needed because current limiting is now accomplished by high-frequency interruption of the drive circuit. This is introduced by the two comparators that turn the MOSFET bridge off and on in response to preset current levels sensed as voltage drops across the 0.1-ohm resistances. As previously mentioned, this oscillatory mode enables fast current rise during the phase sequence of the motor, but maintains the average cur rent in the windings at a safe level. To advantageously use this switching technique, the dc supply voltage is increased to 70 V.
The schematics of both FIG. 9 and FIG. 10 only show the driver circuitry for one motor winding, it being understood that duplicate drivers are needed for the other motor winding. The “brains” or logic, however, suffice as shown , for both motor windings. By inspecting the parts list of Table 1B, you can quickly determine which circuit components must be had in duplicate, and which individually serve the needs of the entire motor.
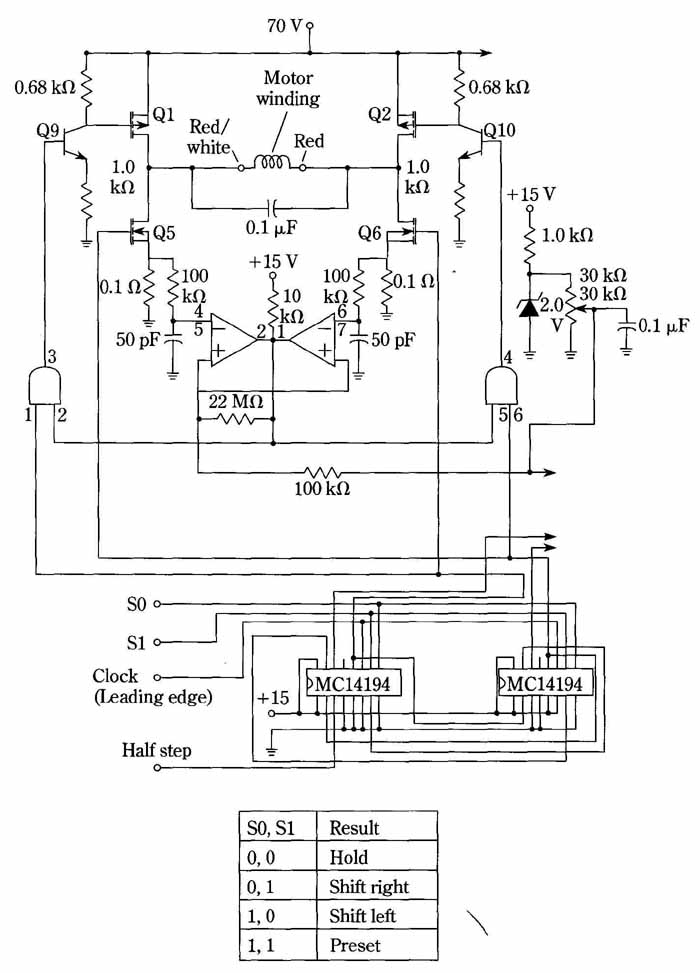
FIG. 10 Switched-current drive applied to the stepping motor system
of FIG. 9. Oscillatory interruption of the winding-current limits it
to a safe value, but allows it to rise rapidly. This enhances torque
at high stepping-rates. Unlike the resistive method of FIG. 9, power
dissipation is very low.
Table 1B. List of parts for the switched-current drive-system of FIG. 10.
Integrated circuits:
1. 2 x MC14194B, CMOS 4-bit shift register
2. 1 x MC14O81B, CMOS Quad “AND” gate
3. 1 x MLM399P, Quad comparator
TMOS power FETs:
1. Q1—Q4, 4 x MTP8PO8 or MTM8PO8, P-channel power FET
2. Q5—Q8, 4 x MTP12N08 or MTM12NO8, N-channel power FET
Transistors:
1. Q9—Q12, 4 x MPS8099, NPN small signal transistors
Resistors:
1. 4x0.1 ohm 2.0W
2. 4x680
3. 5x1.0 k-ohm
4. 2x10k
5. 1x30k
6. 1 x 30 k-ohm adjustable, 1 W
7. 6x100k ohm %W
8. 2x22M-ohm
Zener diode:
1. 1 x MZ4679, 2 V reference
Capacitors:
1. 3x0.1uF 100V
2. 4x50 pF 50V
The current-interruption rate generated by the comparator circuitry is not of prime importance; it’s only desirable that this rate be much higher than the stepping rate of the motor. The approximate current-rise speed will be V/L, where V is the supply voltage and L is the inductance of the driven motor winding. Although this does not take into account the ohmic resistance of the windings, it can be appreciated that drive current should rise about three times faster than when working from a 24-V supply. The practical consequence of these matters is that only 25 percent of supplied power gets to the motor in the setup of FIG. 9, whereas the switching technique used in FIG. 10 allows nearly 80 percent of supplied power to drive the motor. The comparison is fair inasmuch as the cited efficiencies apply for per-winding currents of two amperes in both cases.
As a practical hint, it should prove expedient to get the simpler circuit of FIG. 9 operative first. Then, the sophistications depicted in FIG. 10 can be added. In this way, troubleshooting, if required, is likely to be more straightforward.
