AMAZON multi-meters discounts AMAZON oscilloscope discounts
..Because of the increasing popularity of solid-state inverters, the use of square waves to operate motors has become commonplace. A wide variation of results has attended such practice. At best, the substitution of such waveforms for the in tended sinusoidal excitation has caused no problems. At worst, it has been found that the motor would not start or operate properly. Between these two extremes, it’s not unusual to find that operation is essentially satisfactory but with greater temperature rise than is experienced with sine-wave operation. Much depends upon the type of motor and its construction. The harmonic energy in a square wave con tributes considerably to the eddy current and hysteresis losses m motors. It also tends to adversely affect commutation and torque characteristics. Just how adverse these effects are, usually has to be determined empirically. Fortunately, some motors have sufficient self-inductance to oppose the flow of heavy harmonic currents. In other instances, a primitive low-pass filter can provide this function. Thus, a provision such as shown in FIG. 19 can present a near enough sinusoid to the motor to alleviate certain difficulties.
One factor that is often overlooked when attempting square-wave operation of motors is the equivalency between sinusoidal and square waves. That is, what square-wave voltage would substitute for the rated sinusoidal voltage? The answer is not immediately obvious and if you resort to “common sense” you can easily be lead astray. In solving this dilemma, it’s best to assume that the fundamental component of the square wave is useful in operating the motor. As previously mentioned, the harmonics either “come along for the ride” or they produce detrimental effects. To simplify the situation, suppose the motor’s inductance keeps harmonic currents at a negligible level. The question that must then be answered is what the RMS value of the square wave’s fundamental frequency is relative to that of the square wave itself.
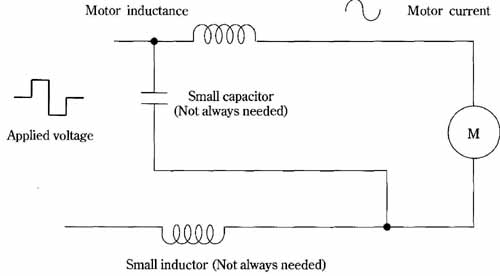
FIG. 19 Filtering of motor current by self-inductance of motor and/or
additional filtering. Actual motor current tends to be a rounded trapazoid.
Additional filtering might be needed, but small filter components generally
suffice because a high-quality sine wave is not necessary. Motor inductance,
Motor current, Small inductor (Not always needed)
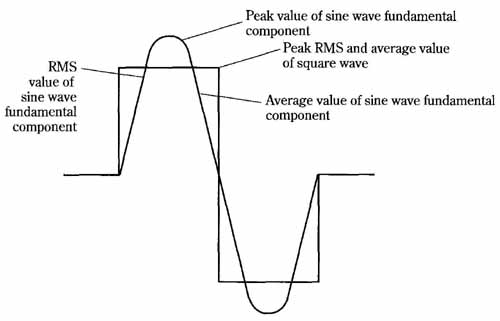 FIG. 20 A closer look at relationships between a square wave and its
fundamental. The peak of the fundamental sine wave is actually greater
than the peak of the square wave, yet the RMS and average values are
lower than those of the square wave. Peak value of sine wave fundamental
component; Peak RMS and average value of square wave; Average value of
sine wave fundamental component
FIG. 20 A closer look at relationships between a square wave and its
fundamental. The peak of the fundamental sine wave is actually greater
than the peak of the square wave, yet the RMS and average values are
lower than those of the square wave. Peak value of sine wave fundamental
component; Peak RMS and average value of square wave; Average value of
sine wave fundamental component
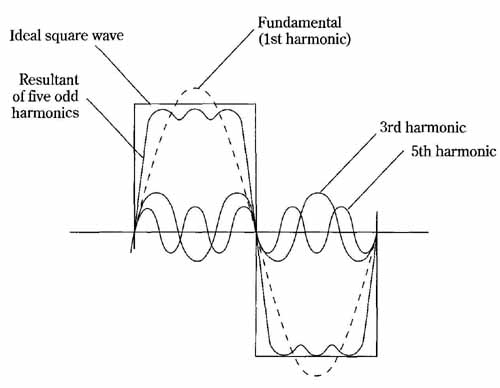 FIG. 21 The harmonic composition of a near square wave. The fundamental
(1st harmonic) produces motor torque. The higher harmonics generate eddy
current and hysteresis losses and tend to interfere with smooth torque.
RMS value of sine wave fundamental component; Ideal square wave; Resultant
of five odd harmonics; Fundamental (1st harmonic); 3rd harmonic; 5th
harmonic
FIG. 21 The harmonic composition of a near square wave. The fundamental
(1st harmonic) produces motor torque. The higher harmonics generate eddy
current and hysteresis losses and tend to interfere with smooth torque.
RMS value of sine wave fundamental component; Ideal square wave; Resultant
of five odd harmonics; Fundamental (1st harmonic); 3rd harmonic; 5th
harmonic
FIG. 20 shows the somewhat surprising fact that the peak value of the first harmonic in a square waveform exceeds that of the square wave itself. How can this be? The explanation is that the overall contributions of the fundamental and the many higher harmonics is such that the flat top of the square wave is developed. For example, if you considered the third harmonic, you would find that it subtracts from the peak of the fundamental. This is visually evident in FIG. 21. Again, the net result of many harmonics is the square wave, even though the peak of the fundamental actually exceeds the amplitude of the square wave itself.
It can be shown that the peak value of the fundamental sine wave exceeds the top of the square wave by the fraction 4/Pi, or 1.27. In other words, the peak value of the fundamental is 27 percent greater than the flat-top, or peak value, of the square wave. The important thing to note, however, is that despite this relationship between peak values, the RMS value of the fundamental sine wave is still below that of the square wave. This too can be ascertained from FIG. 20. A larger amplitude square wave is needed in order to yield a fundamental sine wave whose RMS value matches the rated RMS sine-wave voltage of the motor. Thus, a 115-volt motor will require a square wave with a greater value than 115 volts. But, how much greater?
Assuming only that a particular motor has sufficient inductive reactance to cause motor current to be “reasonably” sinusoidal, you can calculate the required square-wave voltage that must be applied to the motor to simulate its rated sine-wave performance. We’re not dealing with the low distortions expected in stereo equipment. Rather, distortions of 20 or 30 percent will enable entirely satisfactory motor operation. Referring again to FIG. 20, start with the fact that the peak value of the fundamental sine wave is 1.27 times the square-wave amplitude. The RMS value of this sine wave will then be 0.707 x 1.27, or 0.898 times the amplitude of the square wave. Thus, the sine-wave RMS value is actually less than the square-wave amplitude. (Square waves, RMS, average, and peak values are identical.)
The previous calculation shows that the requisite square wave must be 1/0.897, or 1.11 times the square-wave amplitude. For example, a motor rated for 115 volts from a sine-wave source will require 115 x 1.11, or 127.7 volts from a square-wave source, such as a solid-state inverter.
If there is not sufficient self-inductance, or external inductance associated with the motor, the above reasoning might not prove valid. Indeed, the first several harmonies of the squarewave might then contribute enough hysteresis and eddy-current heating, and might interfere sufficiently with the torque of the motor so that an actual reduction in square-wave voltage from the motor-rated voltage might prove necessary. Under such conditions, the optimum performance won’t likely be forth coming. A rudimentary low-pass filter in conjunction with a square-wave voltage of 110 percent rated motor voltage will yield good results in most instances.
