AMAZON multi-meters discounts AMAZON oscilloscope discounts
.Many so-called stepping motors have appeared on the market. Whether or not all of these devices qualify as motors tends to be a controversial question. Whatever their form, the common operational mode is that a discrete quantum of angular rotation occurs in response to a pulse. For continual rotation to take place, a properly coded pulse train must be applied so that there is a sequential “stepping” motion of the shaft. In essence, the pulse coding is such that a rotating field is produced. One of the salient features of these devices is the ability to repeat positional information. No feedback loop is required for such performance.
A particularly interesting device of this kind is the Slo-Syn motor made by the Superior Electric Company. Significantly, the Slo-Syn motor is marketed both as a stepping motor and as a synchronous motor. It is, indeed, both of these. Moreover, it’s described as a permanent-magnet inductor motor.
Figure 5-15 is an exploded view of the Slo-Syn motor. It’s evident that there are no commutator or brushes, no slip rings, and no windings on the rotor. Not evident is the nature of the stator windings. The stator is a four-pole, two-phase structure with a large number of “teeth.” The rotor is also toothed and is magnetized so that a south pole occupies one-half of the periphery while a north pole occupies the other half. Although the stator has only four poles and the rotor has only two poles, the presence of the teeth on both members affords a large number of opportunities for positional “lock up” of the rotor. A typical rotor-stator tooth configuration is shown in FIG. 16. In this illustration, poles Ni, S3, N5, and S7 form one phase; poles N2, S4, N6, and S8 form the other phase.
An insight into operation from both pulsed and sinusoidal power is provided by the arrangement shown in FIG. 17. In essence, the potentiometer constitutes a two-phase generator. One complete revolution of this potentiometer advances the angular position of the rotor by one tooth, in the same way that one cycle from a conventional ac supply would. With a rotor having 100 teeth (two 50-tooth sections), 100 revolutions of the potentiometer would be required for one complete revolution of the motor shaft. The positions of the potentiometer and motor always remain synchronously related—a given angular position of the motor can always be “recaptured” by turning the potentiometer back to its total angular displacement from “start” that previously corresponded to that motor position.
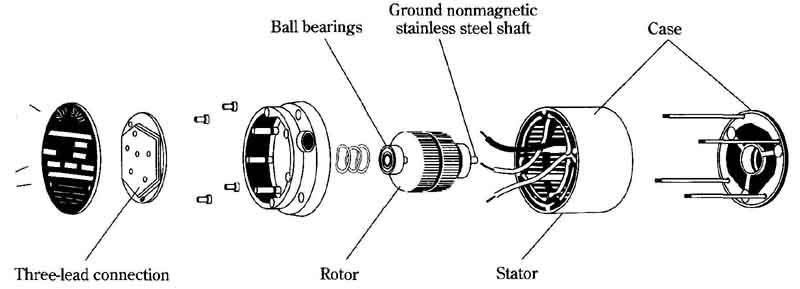
FIG. 15 Exploded view of the Slo-Syn motor. by Superior Electric Co.
(Three-lead connection; Rotor Stator)
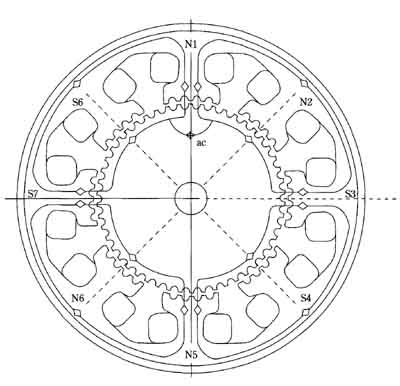 FIG. 16 The rotor-stator tooth configuration for a 72-RPM, 60-Hz Slo-Syn
motor.
FIG. 16 The rotor-stator tooth configuration for a 72-RPM, 60-Hz Slo-Syn
motor.
The Slo-Syn motor will operate from a single-phase line when a suitable phase- shifting network is provided, such as that depicted in FIG. 18A. The basic idea, of course, is to make the motor stator “see” a two-phase supply. The motor then operates at subsynchronous speed, which is 72 RPM with a 60-Hz line when the rotor has 100 teeth. The fact that the stator has four poles is not the significant speed-determining factor, as it’s with conventional synchronous motors. The 100-tooth rotor is equivalent to a 100-pole rotor, and the motor operates as if the stator also had this number of poles. The subsynchronous principle has been known for a long time and has previously been utilized in timing applications where constant speed was necessary and where it was desired to avoid complex, torque-consuming gear trains for speed reduction.
In the event of any appreciable change in frequency, either R or C in the phase- shift network must be changed. A compromise network is feasible for use with both 50- and 60-Hz lines. Additionally, when a constant-torque output is desired, the volt age applied from the line must be varied as shown in FIG. 19 because the winding impedance of the stator is a function of frequency. If constant-torque output is not of primary interest, it’s conceivable that a range of speed variation can be obtained with fixed voltage. In such a case, the low-speed operation limit is imposed by temperature-rise considerations, because greater current will be carried by the stator windings at low frequencies. A favorable factor here is that starting, running, and stall currents are, for all practical purposes, the same.
A more convenient way to obtain a wide range of speed adjustment is shown in FIG. 18B. In this circuit, a two-phase source of power is used. No phase-shift net work is needed. Applied voltage must still be increased with frequency if constant- torque output is desired.
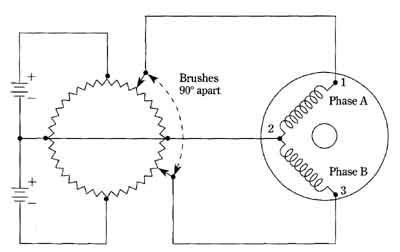
FIG. 17 An arrangement for the “slow-motion” rotation of the Slo-Syn
motor. Superior Electric Co.
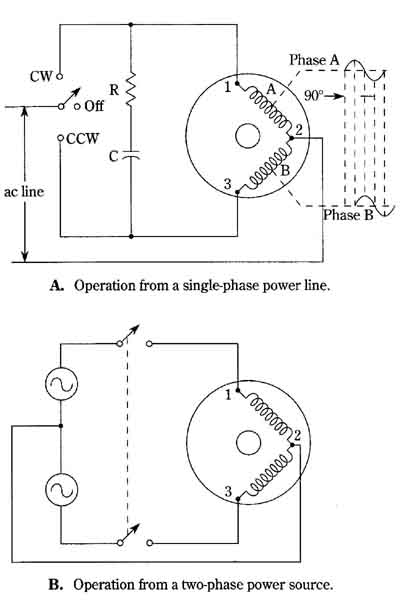 FIG. 18 ac operation of the Slo-Syn motor.
FIG. 18 ac operation of the Slo-Syn motor.
Unlike various other timing and positioning motors, the Slo-Syn motor is capable of delivering considerable mechanical power—the Slo-Syn is made in frame sizes to accommodate torque outputs from 25 to 1800 ounce-inches.
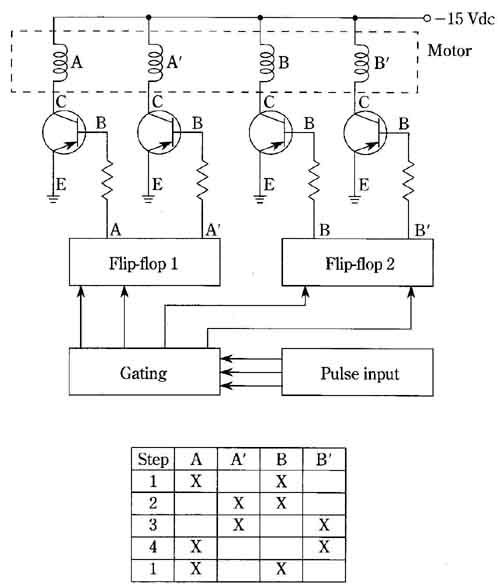
The switching logic for sequential stepping of the Slo-Syn motor is shown in FIG. 20. These motors are also made with bifilar windings so that a single-ended power supply can be used. The stator retains its two-phase, four-pole winding format, and the basic operation of the motor is unchanged. Figure 21 illustrates the way logic is applied for sequential stepping of the bifilar-wound Slo-Syn motor.
{kind=link}