AMAZON multi-meters discounts AMAZON oscilloscope discounts
.As already shown, speed is not the only motor operating parameter amendable to electronic control. Others are starting, stopping, reversal, positioning, torque, and horsepower. Another interesting and useful control technique is shown in FIG. 10. Here, again, the torque of a dc motor (usually a permanent-magnet or a shunt type) is controlled independently of speed. This is achieved with current feedback. The scheme is analogous to that employed in current-regulated power supplies. The torque command voltage is, in essence, an adjustable reference source. For any given value of torque-command voltage, the current in the armature of the motor is maintained at a constant value. Because the torque is proportional to armature cur rent, it also is “programmed” by the torque-command voltage.
The motor is by its nature a current-to-torque transducer. The power converter is, because of the current feedback loop, a voltage-to-current converter. Therefore, the overall arrangement produces torque in response to input voltage. Although speed is at the mercy of the applied mechanical load, the speed regulation of permanent-magnet and shunt motors justifies the classification of these types as constant-speed machines. Of course, such a designation has the aspect of relativity—compared with series motors, the permanent-magnet and shunt motors are quite deserving of such classification. Also, they compare favorably to induction motors in this respect. However, com pared with synchronous motors, such “constancy” would prove misleading for many applications.
The motor employed in such a torque-control system will actually display poorer speed regulation than it normally would without control. This is because any current-regulating process degrades the voltage regulation across the load through which the current is stabilized. Inasmuch as motor speed is proportional to armature voltage, it follows that the speed in such a system will tend to be an undisciplined performance parameter. However, this is generally not of detrimental consequence in many torque-control applications such as winders, unwinders, tension mechanisms, and others.
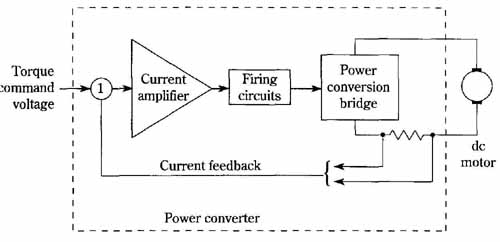
FIG. 10 Torque control of a permanent-magnet or shunt dc motor.
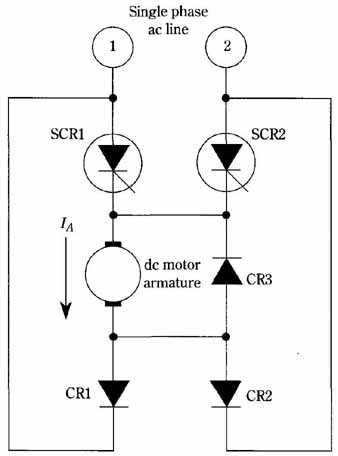
FIG. 11 SCR power-conversion bridge.
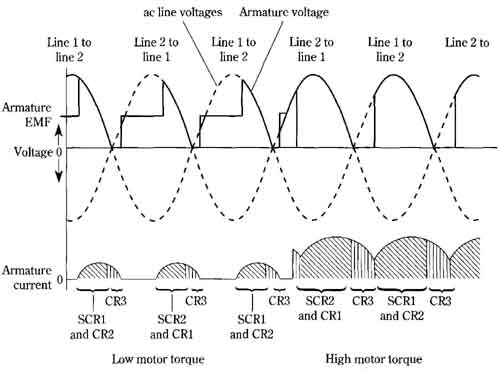
FIG. 12 Single-phase, full-wave bridge waveforms.
A simplified schematic diagram of a power-conversion bridge suitable for the torque-control technique is shown in FIG. 11. The bridge is unidirectional in the sense that current always flows in the same direction through the motor. The wave forms pertaining to low- and high-torque conditions are illustrated in FIG. 12.