AMAZON multi-meters discounts AMAZON oscilloscope discounts
. In the shunt motor, and the permanent-magnet motor as well, the electromagnetic torque developed in the armature is almost directly proportional to armature current. Therefore, limiting the armature current also defines the maximum torque that can be developed. This follows from the equation for torque T, where T = k Ia PHI. In this relationship, constant I is a function of the design parameters of a given motor, such as the number of poles, the characteristics of the magnetic material, the dimensions of the air gap, etc. Because field strength PHI is, or can be, nearly constant in a shunt motor or a permanent-magnet motor, it follows that torque is directly controllable by means of armature current. Of course, the control of speed is generally assumed to be derived from torque control and the two performance parameters might appear to be interdependent.
However, the speed of a shunt motor or permanent-magnet motor is fairly constant with respect to the torque extracted from the shaft. Moreover, the speed of these motors can actually be controlled by armature voltage while holding armature current constant. What is needed is a controller that will produce abrupt current limiting as is attainable from laboratory power supplies that have current-limiting controls.
The setup shown in FIG. 8 allows a dc permanent-magnet or shunt motor to be independently controlled in either speed or torque. The technique is straightforward with a linear power supply. Greater overall efficiency can be realized with a regulated supply using thyristors or premised on the switchmode principle. The voltage and current controls on the regulated supply must be set high enough to enable the mo tor to operate at the maximum desired speed and torque. Inasmuch as these motors naturally have fairly flat speed versus load curves, it’s possible to dispense with the tachometer voltage-feedback loop in some practical cases. With both feedback loops operative, the speed vs. torque characteristics will be much as depicted in the curves of FIG. 9. Here, torque depends on the level of constant current delivered to the armature, speed depends on the level of constant voltage applied to the armature.
Voltage-regulated dc supply with adjustable current-limit. Torque control
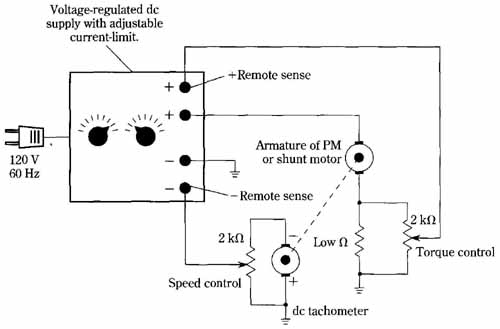
FIG. 8 Independent speed and torque control/regulation of pm or shunt
dc motor. Speed is primarily a function of armature voltage. Torque is
primarily a function of armature cur rent. The voltage-regulated dc supply
automatically becomes a current regulator when a preset level of armature
current is reached.
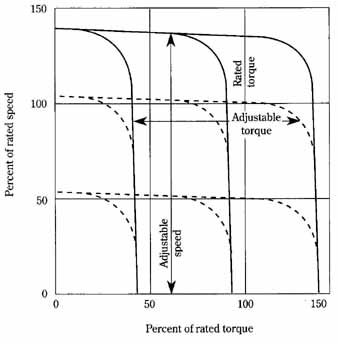
FIG. 9 Curves showing independent speed and torque control of a pm
or shunt dc motor.
If a shunt motor rather than a permanent-magnet motor is used, an independent field current source is needed. Inasmuch as field current tends to be a small fraction of armature current, minimal cost and complexity are involved. Indeed, it need not even be regulated in most instances because tendencies for small variations in speed or torque will be stabilized via the action of the two feedback loops.
The torque adjustment has many uses. With essentially frictional loads, if the load demand exceeds the torque adjustment setting, the motor will slow down drastically, or stop. This prevents overloading the horsepower rating of the motor. Similarly, the motor won’t overexert itself when presented with loads requiring higher starting torques than those allowed by the setting of the torque potentiometer. These safety features are valuable in many industrial processes where damage and/or injury could result from the attempt of a drive motor to overcome a “jam-up” in the driven machinery. Gearmotors, in particular, can be protected from transmitting dangerous torque levels through their speed-reduction units. The torque-control feature can also be used for “softening” the starting interval and for controlling acceleration to a preset speed when essentially inertial loads are used.