AMAZON multi-meters discounts AMAZON oscilloscope discounts
.The inherent droop in the speed torque characteristics curve of the permanent-mag net motor can be largely overcome by means of a feedback arrangement such as that depicted in the schematic diagram of FIG. 6 (this scheme is also applicable to shunt motors, in which case it would probably be preferable to excite the field from a constant-current source). The improvement obtainable with this technique is shown in the curves of FIG. 7. It’s relevant to point out that the downward slopes of the curves in FIG. 7A would be even steeper if rheostatic control of armature current were used.
This is an 'on-off' system in which operating current is parceled out to the mo tor armature in such a way as to maintain a near-constant speed. It bears a resemblance to pulse-width modulation but is not ordinarily so designated because both the on time and the current vary. It shares the salient feature of pulse-width modulation, however, in that motor current is either on or off—there is no power dissipation from intermediate current values as in rheostatic control. The average value of armature current is the controlled parameter, and this is a function of the average duty cycle.
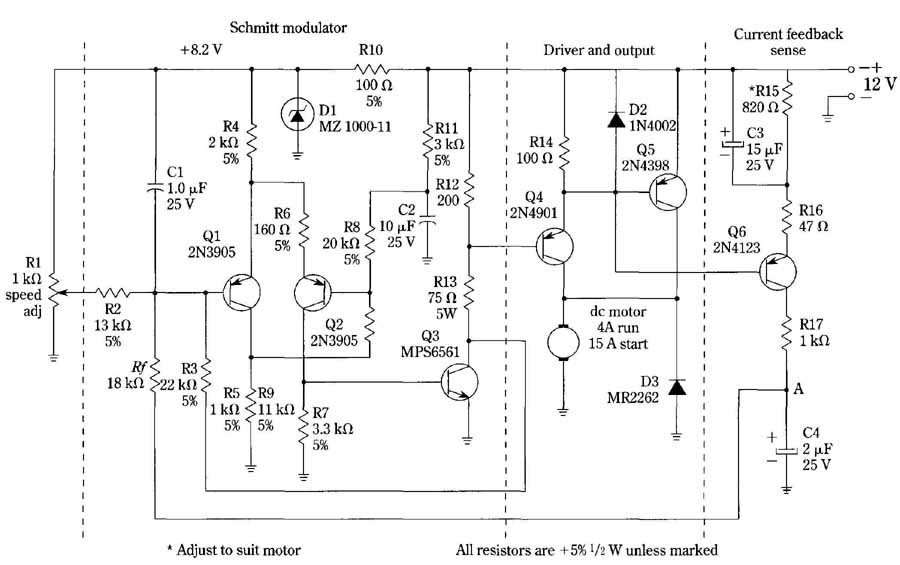
FIG 6 dc motor speed-control circuit utilizing current feedback. * Adjust
to suit motor All resistors are + 5% 1/2 W unless marked; Schmitt modulator;
Driver and output; Current feedback sense
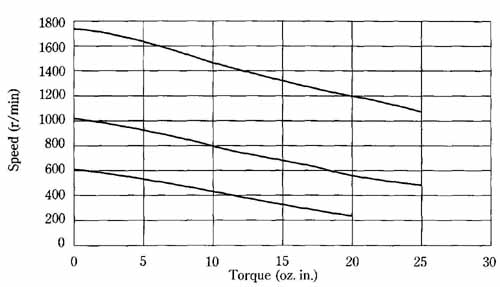
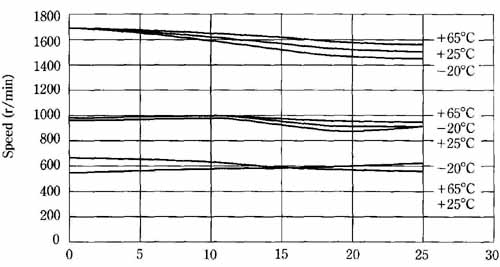
FIG 7 Speed-regulation characteristics of a permanent-magnet dc motor.
A. “Natural” characteristics when motor is powered from a tapped battery
or a voltage, regulated power supply. B. Speed-torque characteristics
when the same motor is controlled by the feedback circuit in FIG. 6.
The sensed parameter is not directly motor speed, rather, it’s the voltage drop across the base-emitter junction of power-output transistor Q5. This quantity, T varies with motor current. For example, if increased mechanical load is applied to the motor, it tends to slow down and decrease its counter EMF so that it can consume more torque-producing current. Voltage drop V_BE in Q5 then becomes greater because of higher collector current. The sense transistor is Q6, and the dc voltage that represents motor speed is developed at point “A.” This voltage is applied to the input of a Schmitt-trigger circuit that includes transistors Q 1 and Q2. A “comparison” voltage derived from the speed-adjust control, R1, is also applied to this input. The conduction state of transistor Q2 is therefore governed by the net dc voltage sampled by the base of input transistor Q1. Transistor Q3 is a simple dc amplifier stage for more effective actuation of drive transistor Q4. Transistor Q5 is the power-output stage that actually “meters” current to the motor armature. The final essential element is the free-wheeling diode, D3. This diode provides a path for armature current during intervals when transistor Q5 is in its off state. The source of this current is the energy stored in the magnetic field of the motor. A more-constant torque results from this current path through D3. Without D3, this stored energy would manifest it self as a destructive voltage spike.
From the foregoing discussion, the operating principle of this speed-regulating circuit can now be understood. As already pointed out, an increased motor load results in a higher base-emitter voltage, V_BE, in power-output transistor Q5. This voltage is sampled by feedback-sense stage Q6, and a dc voltage that is proportional to the average V_BE in Q5 is developed across capacitor C4. When a higher voltage is thus developed across capacitor C4, it causes input stage Q1 of the Schmitt trigger to shorten its conduction intervals. The resultant increase in on time for stage Q2, and for all subsequent stages through Q5, causes a higher average current to be delivered to the motor armature, thereby restoring much of the depleted speed. The opposite reactions take place when the load on the motor is relaxed.
A little contemplation reveals that the circuit of FIG. 6 involves positive feed back (an increase in armature current begets a further increase). However, the feed back factor is not sufficient to cause any instability. The motor itself tends to discourage a cumulative buildup to either a “hung-up” or an oscillatory condition be cause as each increment of additional current produces increased speed, the counter EMF is increased, thereby inhibiting development of runaway current.
The Schmitt-trigger voltage divider, made up of R5, R8, R9, and R11, connects across the 12-volt power source. Because of this, if the voltage from the power source becomes higher, transistor Q2 will be biased on for a shorter time, thereby tending to prevent increased average current from being delivered to the motor. Al though this compensating action is not perfect, it makes motor speed much less de pendent on supply voltage than would otherwise be the case.
Because of varying characteristics in motors and wide tolerances in transistor parameters, the optimum value for resistance R15 will generally require trial-and-error determination.