AMAZON multi-meters discounts AMAZON oscilloscope discounts
GOALS:
1. Understand the operation, installation, and setup for an alternating current (AC) motor drive.
2. Understand the operation, installation, and setup for a direct current (DC) motor drive.
3. Understand the operation, installation, and setup for PLC motor control.
The two most important emerging technologies associated with motor control are adjustable speed drives and programmable logic controllers. Adjustable-speed drives (also known as variable-speed drives) allow motor driven loads to operate within a wide range of speeds. Con trolling motor speeds to load requirements can increase both the efficiency and performance of a motor installation. A programmable logic controller (PLC) is a type of computer commonly used in motor control applications. The traditional motor control circuit is hard-wired while PLC control is program-based. This section deals with the unique installation requirements of these electronic control systems.
AC Motor Drive Fundamentals
The primary function of any electronic adjustable-speed drive is to control the speed, torque, acceleration, deceleration, and direction of rotation of a machine. Unlike constant-speed systems, the adjustable-speed drive permits the selection of an infinite number of speeds within its operating range.
The use of adjustable-speed drives in pump and fan systems can greatly increase their efficiency. Outdated technology most often used throttles or dampers to interrupt the flow as a means to control it. The fluid or air was held back by the throttle or damper but the energy used to move the fluid or air was then dissipated uselessly. That wasted energy was still accounted for and paid for. Running a system this way is like driving a car with the accelerator pressed to the floor while con trolling speed with the brake. An electronic adjustable speed drive, on the other hand, allows precise control of motor output. In the case of centrifugal fans and pumps, there is a significant savings in the power required to handle the load.
Ill.1 shows a variable-speed AC motor drive used for lower-power applications. Power wiring consists of the conductors supplying power to the drive (L/L1 and N/L2) and the conductors supplying power to the motor (U/T1, V/T2, and W/T3). The North American designation for load conductors is T1, T2, and T3; the European designation for load conductors is U, V, and W. While single-phase supplies power to the drive, the output to the motor is three-phase. Control wiring consists of inputs and outputs connected to the control terminal strip. Various control wiring configurations are used, depending on the make of controller and specific application. Branch circuit protection via circuit breaker or disconnect switch and fuses must be provided to comply with the National Electric Code (NEC) and all local codes.

ill.1 Variable-speed AC motor drive used for lower-power applications.
Variable-Frequency Drives (VFD)
Squirrel-cage induction motors are the most common three-phase motors used in commercial and industrial applications. The preferred method of speed control for squirrel-cage induction motors is to alter the frequency of the supply voltage. Since the basis of the drive's operation is to vary the frequency to the motor in order to vary the speed, the best-suited name for the system is the variable frequency drive (VFD). However, other names used to reference this type of drive include adjustable-speed drive (ASD), adjustable-frequency drive (AFD), variable-speed drive (VSD), and frequency converter (FC).
A VFD controls the speed, torque, and direction of an AC induction motor. It takes fixed voltage and frequency AC input and converts it to a variable voltage and frequency AC output. ill.2 shows the block diagram of a typical three-phase variable-frequency drive controller. The function of each block is as follows:
• Converter: A full-wave rectifier that converts the applied AC to DC.
• DC bus: Also referred to as a DC link, connects the rectifier output to the input of the inverter. The DC bus functions as a filter to smooth the uneven, rippled output to ensure that the rectified output resembles as closely as possible pure DC.
• Inverter: The inverter takes the filtered DC from the DC bus and converts it into a pulsating DC waveform. By controlling the output of the inverter, the pulsating DC waveform can simulate an AC waveform at different frequencies.
• Control logic: The control logic system generates the necessary pulses used to control the firing of the power semiconductor devices such as SCRs and transistors. Fairly involved control circuitry coordinates the switching of power devices, typically through a control board that dictates the firing of power components in the proper sequence. An embedded microprocessor is used for all internal logic and decision requirements.
Sometimes called the front end of the VFD, the converter is commonly a three-phase, full-wave bridge rectifier. However, one of the advantages of variable-frequency drives is being able to operate a three-phase AC motor from a single-phase AC supply. The key to this is process is the rectification of the AC input to a DC output. At this rectification point, the DC voltage has no phase characteristics; the VFD is simply producing a filtered pulsating DC waveform. The drive inverts the DC waveform into three different pulse-width modulated waveform signatures that duplicate an AC three-phase waveform. ill.3 shows three-phase and single-phase converter input connections.
AC input voltage levels that are different from that required to operate the motor require the converter section to raise or lower the voltage to the proper operating level of the motor. As an example, an electric motor drive supplied with 115 V AC that must deliver 230 V AC to the motor requires a transformer capable of stepping up the input voltage.
The VFD offers an alternative to other forms of power conversion in areas where three-phase power is unavailable. Since it converts incoming AC power to DC, the VFD really doesn't care if its source is single or three phase. Regardless of the input power, its output will always be three phase. Drive sizing, however, is a factor since it must be capable of rectifying the higher-current, single-phase source. As a rule of thumb, most manufacturers recommend doubling the normal three-phase capacity of a drive that will be operating on a single-phase input.
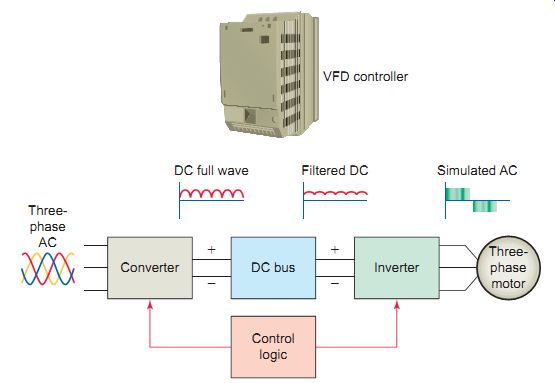
ill.2 Block diagram of a typical three-phase variable-frequency drive.
DC full wave Filtered DC Simulated AC; Three-phase AC; VFD controller;
Converter DC bus Inverter; Control logic
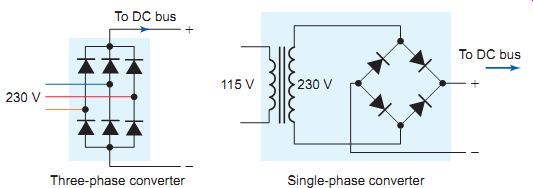
ill.3 Three-phase and single-phase converter input connections. Three-phase
converter; Single-phase converter; To DC bus
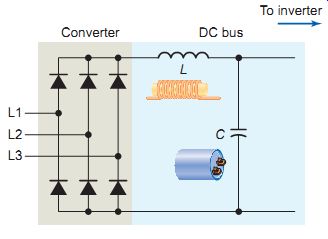
ill.4 Inductor and capacitor connections within the DC bus. DC bus Converter;
To inverter
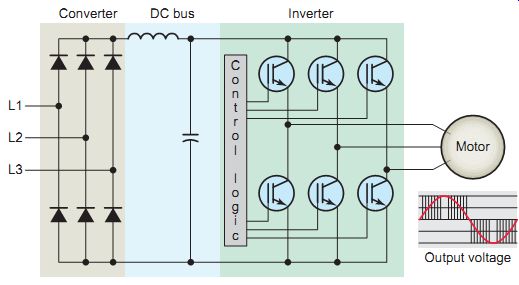
ill.5 The three sections of a variable-speed drive. Converter DC bus
Inverter
ill.6 Simplified circuit of a PWM inverter.
Single-phase operation is limited to smaller-horsepower motors. Some manufacturers offer some models for single phase input only and others that are fully rated for both single-phase and three-phase input.
After full-wave rectification of an AC supply into a VFD, the DC output passes through a DC bus. ill.4 shows the inductor ( L ) and capacitor ( C ) connections within the DC bus. They work together to filter out any AC component of the DC waveform. The principal energy storage element is the bus capacitors. Any ripple that is not smoothed out will show up as distortion in the motor output waveform. Most VFD manufacturers provide a special terminal block for DC bus voltage measurement.
With a 460-V AC input you should read an average DC bus voltage of about 650 to 680 V DC. The DC value is calculated by taking the root mean square (RMS) value of the line voltage and multiplying it by 1.414. AC voltage readings of more than 4 V AC on the bus may indicate a possible capacitor filtering problem or a problem with the diode bridge converter section.
The inverter is the final output section of a VFD. This is the point where the DC bus voltage is switched on and off at specific intervals. In doing so, the DC energy is changed into three channels of AC energy that an AC motor uses to operate. Today's inverters use insulated-gate bipolar transistors (IGBTs) to switch the DC bus on and off. ill.5 shows a simplified diagram of the three sections of a variable-speed drive. The control logic and inverter section control the output voltage and frequency to the motor. Six switching transistors are used in the inverter section. The control logic uses a microcontroller to switch the transistors on and off at the proper time. The main objective of the VFD is to vary the speed of the motor while providing the closest approximation to a sine wave for current.
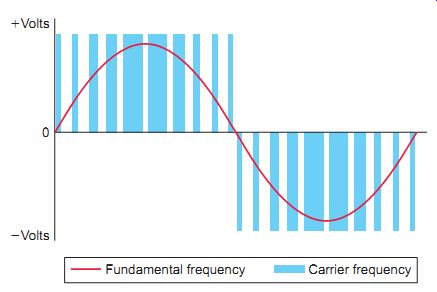
ill.7 Sine-wave line voltage superimposed on the PWM inverter output.
Fundamental frequency Carrier frequency

ill.8 Inverter motor and control.
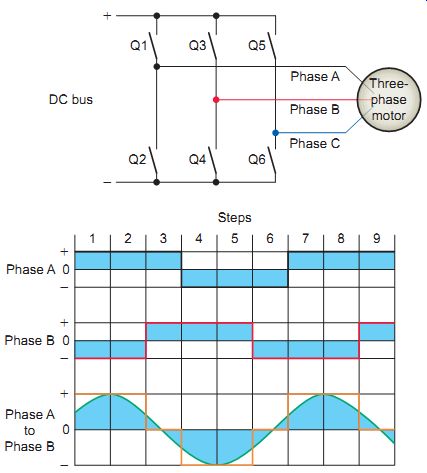
In the simplest circuit implementation, two IGBTs are placed in series across the DC supply and are switched on and off to generate one phase of the three phases for the motor. Two other identical circuits generate the other two phases. ill.6 shows a simplified circuit of a pulse width modulation (PWM) inverter. Switches are used to illustrate the way that the transistors are switched to pro duce one phase (A to B) of the three-phase output. The output voltage is switched from positive to negative by opening and closing the switches in a specific sequence of steps. The operation can be summarized as follows:
• During steps 1 and 2, transistor switches Q1 and Q4 are closed.
• The voltage from phase A to B is positive.
• During step 3, transistor switches Q1 and Q3 are closed.
• The difference in voltage between phase A and phase B is zero, resulting in zero output voltage.
• During steps 4 and 5, transistor switches Q2 and Q3 are closed.
• This results in a negative voltage between phases A and B.
• The other steps continue in a similar manner.
• Output voltage is dependent on the state of the switches (open or closed), and the frequency is dependent on the speed of switching.
ill. 7 shows the sine-wave (AC) line voltage, superimposed on the pulsed inverter output, or simulated AC. Notice that the pulses are the same height for each pulse. This is because the DC bus voltage the drive uses to create these pulses is constant. Output voltage is varied by changing the width and polarity of the switched pulses.
Output frequency is adjusted by changing the switching cycle time. The resulting current in an inductive motor simulates a sine wave of the desired output frequency.
Most true RMS-measuring multimeters are fast enough to measure the RMS value of the PWM voltage and current.
There are two frequencies associated with a PWM variable-frequency drive: the fundamental frequency and the carrier frequency. The fundamental frequency is the variable frequency a motor uses to vary speed. In a typical VFD, the fundamental frequency will vary from a few hertz up to a few hundred hertz. The inductive reactance of an AC magnetic circuit is directly proportional to the frequency ( XL = 2 fL ). Therefore, when the frequency applied to an induction motor is reduced, the applied voltage must also be reduced to limit the current drawn by the motor at reduced frequencies. The microprocessor control adjusts the output voltage waveform to simultaneously change the voltage and frequency to maintain the constant volts/hertz ratio.
The carrier frequency (also known as the switch frequency) is the frequency at which the pulses in pulse-width modulation switch at. The carrier frequency is a fixed frequency substantially higher than the fundamental frequency.
This high switching speed produces the classic whine associated with variable-frequency drives. Higher carrier frequency allows a better approximation to the sinusoidal form of the output current. However, higher switch frequencies decrease the efficiency of the drive because of increased heat in the power transistors. The carrier frequency for VFDs is in the 2- to 16-kHz range. Adjusting the carrier frequency automatically in accordance with the changing load and temperature will result in quieter operation.
The inverter-duty motor shown in ill.8 is designed for optimized performance to operate in con junction with a variable-frequency drive. An inverter duty motor can withstand the higher voltage spikes produced by all VFDs and can run at very slow speeds without overheating.
SCR drives are most commonly used to control DC motors, but the system is also used in some older AC inverter drives. Earlier types of VFDs used silicon con trolled rectifiers (SCRs) to do the switching. As they have become available in higher voltage and current ratings, faster-switching transistors became the preferred switching components for use in inverter circuits.
Speed control can be open loop , where no feedback of actual motor speed is used, or closed loop, where feedback is used for more accurate speed regulation. How a motor reacts is very dependent on the load conditions. An open loop VFD knows nothing about load conditions; it only tells the motor what to do. If, e.g., it provides 43 Hz to the motor, and the motor spins at a speed equivalent to 40 Hz, the open loop doesn't know. With closed-loop control the controller tells the motor what to do, then checks to see if it did it, then changes its command to correct for any error. Often a tachometer is used to provide the necessary feedback in a closed-loop system. The tachometer is coupled to the motor, as illustrated in ill.9, and produces a speed feedback signal that is used by the controller. With closed-loop control, a change in load demand is compensated by a change in the power supplied to the motor, which acts to maintain a constant speed.
In general, AC drives control motor speed by varying the frequency of the current supplying the motor. Although frequency can be varied in different ways, the two most common speed control methods in use today are volts per hertz (V/Hz) and flux vector.
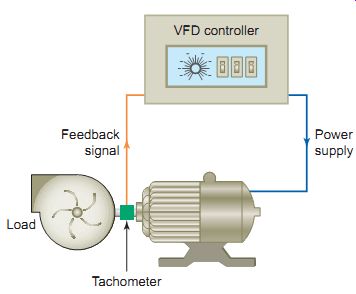
ill.9 Closed-loop control system. Power supply; VFD controller; Load;
Feedback signal; Tachometer
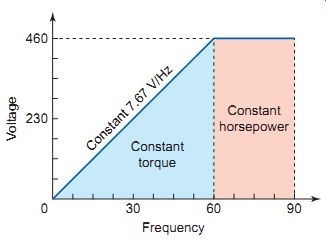
ill.10
V/Hz control of a 460-V AC, 60-Hz motor. Voltage 460, 230; Frequency;
Constant horsepower; Constant torque; Constant 7.67 V/Hz Volts per Hertz;
Drive
Of the speed control methods, volts per hertz technology is the most economical and easiest to apply. The V/Hz drive controls shaft speed by varying the voltage and frequency of the signal powering the motor. Volts per hertz control in its simplest form takes a speed reference command from an external source and varies the voltage and frequency applied to the motor. By maintaining a constant V/Hz ratio, the drive can control the speed of the connected motor. Volts per hertz drives work well on applications in which the load is predictable and does not change quickly, such as fan and pump loads.
In order to prevent overheating, the voltage applied to the motor must be decreased by the same amount as the frequency. V/Hz control runs in open loop without a feed back device. The ratio between voltage and frequency is called volts per hertz (V/Hz). To find the volts per hertz ratio, simply divide the rated nameplate by the rated nameplate frequency. For example the volt per hertz ratio for a 460-Volt, 60-Hz motor is calculated as follows:
V/Hz = Voltage/Frequency
Volts per hertz control provides a linear (straight-line) voltage ratio to the frequency of a motor from 0 rpm to base speed. This is illustrated in ill.10 using a 460-V AC, 60-Hz motor as an example. The volts per hertz ratio of 7.67 is supplied to the motor at any frequency between 0 and 60 Hz. If applied frequency is reduced to 30 Hz, the shaft will slow to half its original speed. In this situation, a V/Hz drive also halves the voltage (here, to 230 V AC) in order to maintain the 7.67 V/Hz ratio, which allows the motor to continue producing its rated torque. Horsepower increases and torque remains constant up to the base speed; however, above base speed (i.e., above 60-Hz frequency), the torque decreases while the horsepower remains constant. This can easily be understood by the simple relation ship between horsepower, speed and torque:
horsepower = torque × speed × K , where K is a units constant.
Volts per hertz control of an AC induction motor is based on the principle that to maintain constant magnetic flux in the motor, the terminal voltage magnitude must increase roughly proportionally to the applied frequency. This is only an approximate relationship, and volts per hertz drives designs may include the following refinements:
• Low-frequency voltage boost (also referred to as IR compensation)--Below 15 Hz the voltage applied to the motor is boosted to compensate for the power losses AC motors experience at low speeds and increase the starting torque capability.
• Steady-state slip compensation -Increases frequency on the basis of a current measurement to give better steady-state speed regulation.
• Stability compensation -To overcome mid-frequency instabilities evident in high-efficiency motors.
Flux Vector Drive
A flux vector drive uses feedback from what is happening at the motor to make changes in the output of the drive. However, it still relies on the basic volts per hertz core for controlling the motor. These combined techniques control not only the magnitude of motor flux but also its orientation, thus the flux vector name. The flux vector method provides more precise motor speed and torque control.
Flux vector control improves on the basic V/Hz control technique by providing both a magnitude and angle between the voltage and current. Volts per hertz drives control only the magnitude. Vector drives come in two types, open loop and closed loop , based on the way they get their feedback information. Open loop is actually a misnomer because it’s actually a closed loop sys tem, but the feedback loop comes from within the VFD itself instead of an external encoder. For this reason there is a trend to refer to open-loop drives as sensor less vector drives. Sensorless vector control removes a major source of complexity and simplifies the drive installation.
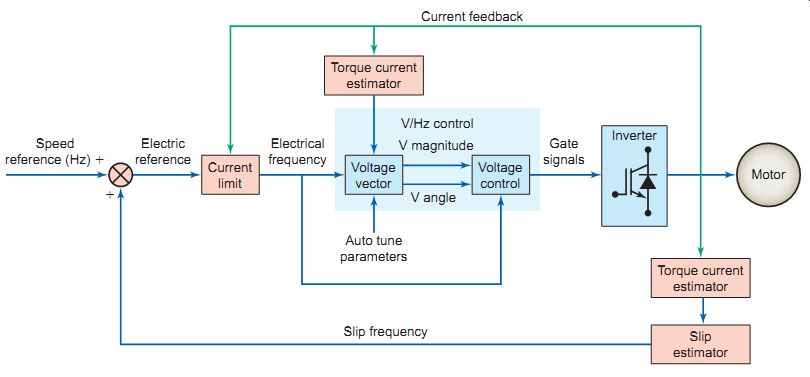
ill.11 Sensorless vector control drive block diagram. Current feedback
Torque current estimator Torque current estimator Slip estimator Current
limit Speed reference (Hz) _ Electric reference Electrical frequency Inverter
Motor V/Hz control V magnitude V angle Auto tune parameters Slip frequency
Gate signals; Voltage vector; Voltage control
ill.12 Flux vector drive and encoder. Flux vector drive Encoder
The block diagram of a sensorless flux vector control drive is shown in ill.11. Its operation can be summarized as follows:
• Slip is the difference between the rotor speed and the synchronous speed of the magnetic field and is required to produce motor torque. The slip estimator block keeps actual motor rotor speed close to the desired set speed.
• The torque current estimator block determines the percent of current that is in phase with the voltage, providing an approximate torque current. This is used to estimate the amount of slip, providing better speed control under load.
• V angle controls the amount of total motor current that goes into motor flux enabled by the torque current estimator. By controlling this angle, low-speed operation and torque control are improved over those of the standard V/Hz drive.
• The flux vector control retains the V/Hz core and adds additional blocks around the core to improve the performance of the drive.
• The current resolver attempts to identify the flux and torque producing currents in the motor and makes these values available to other blocks in the drive.
• The current limit block monitors motor current and alters the frequency command when the motor current exceeds a predetermined value.
A true closed-loop vector drive uses a motor-mounted encoder or similar sensor to give positive shaft position indication back to the microprocessor. The motor's rotor position and speed are monitored in real time via a digital encoder to determine and control the motor's actual speed, torque, and power produced. ill.12 shows a typical flux vector drive and motor-mounted encoder used in AC vector drive applications. The encoder operates by sending digital pulses back to the drive indicating both speed and direction. The processor counts the pulses and uses this information along with information about the motor itself in order to control the motor torque and associated operating speed. The most common encoders deliver 1,024 pulses per revolution. To guard against electromagnetic interference (EMI), the cable assembly between the encoder and drive should be one continuous shielded cable.
A true closed-loop vector drive can also make an AC motor develop continuous full torque at zero speed, something that previously only DC drives were capable of. That makes them suitable for crane and hoist applications where the motor must produce full torque before the brake is released or else the load begins dropping and can't be stopped.
QUIZ:
1. List the common basic control function of an electronic adjustable-speed drive.
2. What is the preferred method for altering the speed of a squirrel-cage induction motor?
3. State the prime function of each of the following parts of a variable-frequency drive: (a) converter, (b) DC bus, (c) inverter, (d) control logic.
4. Explain how it’s possible for a VFD to operate a three-phase motor from a single-phase power source.
5. Calculate the average DC bus voltage for a line volt age of 230 V AC.
6. Which component is the main energy storage element of the DC bus?
7. What types of transistor are currently used in the inverter section of a VFD?
8. How is the output voltage of an inverter varied?
9. How is the output frequency of the inverter varied?
10. What is the difference between the fundamental frequency and carrier frequency of a variable frequency drive?
11. In what ways is an inverter-duty motor different from standard motor types?
12. Compare open- and closed-loop motor control.
13. Explain how the output voltage of a VFD is con trolled using the volts per hertz speed-control method.
14. Calculate the V/Hz for a 230-Volt, 60-Hz motor.
15. How does a flux vector improve on the basic V/Hz control technique?