AMAZON multi-meters discounts AMAZON oscilloscope discounts
Goals:
- • Identify terminal markings for wound rotor (slip ring) motors and controllers.
- • Describe the purpose and function of manual speed control and wound rotor motor applications.
- • Explain the difference between two-wire and three-wire control for wound rotor motors.
- • Connect wound rotor motors with manual speed controllers.
- • Recommend solutions to troubleshoot problems with these motors.
The AC three-phase wound rotor, or slip ring, induction motor was the first AC motor that successfully provided speed control characteristics. This type of motor was an important factor in successfully adapting alternating current for industrial power applications. Because of their flexibility in specialized applications, wound rotor motors and controls are widely used throughout industry to drive conveyors for moving materials, hoists, grinders, mixers, pumps, variable speed fans, saws, and crushers. Advantages of this type of motor include maximum utilization of driven equipment, better coordination with the overall power system, and reduced wear on mechanical equipment. The wound rotor motor has the added features of high starting torque and low starting current.
These features give the motor better operating characteristics for applications requiring a large motor or where the motor must start under load. This motor is especially desirable where its size is large with respect to the capacity of the transformers or power lines.
The phrase "wound rotor" actually describes the construction of the rotor. In other words, it's wound with wire. When the rotor is installed in a motor, three leads are brought out from the rotor winding to solid conducting slip rings, ill. 1.
Carbon brushes ride on these rings and carry the rotor winding circuit out of the motor to a speed controller. Unlike the squirrel cage motor, the induced current can be varied in the wound rotor motor. As a result, the motor speed can also be varied, ill. 2. (Wound rotor motors have stator windings identical to those used in squirrel cage motors.) The controller varies the resistance (and thus the current) in the rotor circuit to control the acceleration and speed of the rotor once it's operating.
Resistance is introduced into the rotor circuit when the motor is started or when it's operating at slow speed. As the external resistance is eliminated by the controller, the motor accelerates.
Generally, wound rotor motors under load are not suitably started with the rings shunted. If such a motor is started in this manner, the rotor resistance is so low that starting currents are too high to be acceptable. In addition, the starting torque is less than if suitable resistors are inserted in the slip ring circuit. By inserting resistance in the ring circuit, starting currents are decreased and starting torque is increased.
Motors for school and classroom use are pro vided with one stator and several interchangeable rotors. These rotors can be used with the same stator and bearing end brackets. The selection of available rotors includes the following types: squirrel cage, wound, and synchronous.
A control for a wound rotor motor consists of two separate elements: (1) a means of connecting the primary or stator winding to the power lines and (2) a mechanism for controlling the current in the secondary or rotor circuit. For this reason, wound rotor controllers are some times called secondary resistor starters.
Secondary resistor starters and speed regulators have a sliding contact (faceplate) design.
This regulator has stationary contacts connected into the resistor circuit. Movable contacts slide over the stationary contacts (from left to right) and cut out of the rotor circuit successive steps of resistance. As a result, there is an increase in the speed of the motor. The entire resistance is removed from the rotor circuit when the extreme right position of the stationary contacts is reached.
At this point, the motor is operating at normal speed.
Basically, there are two types of manual controllers, starters and regulators. The resistors used in starters are designed for starting duty only. This means that the operating lever must be moved to the full ON position. The lever must not be left in any intermediate position. The resistors used in regulators are designed for continuous duty. As a result, the operating lever in regulators can be left in any speed position.
When wound rotor motors are used as adjustable speed drives, they are operated on a continuous basis with resistance in the rotor circuit. In this case, the speed regulation of the motor is changed, and the motor operates at less than the full-load speed.
Sliding contact wound rotor starters and regulators don't have a magnetic primary contactor.
They control only the secondary (rotor) circuit of the motor. A separate magnetic contactor, automatic starter, or circuit breaker is required for the primary circuit. If a primary magnetic contactor is used, electrical interlocks on the movable contact arm will control the operation of the contactor.
ill. 1 Rotor of an 800-hp wound rotor induction motor. (E.g., from Electric
Machinery Company, Inc.)
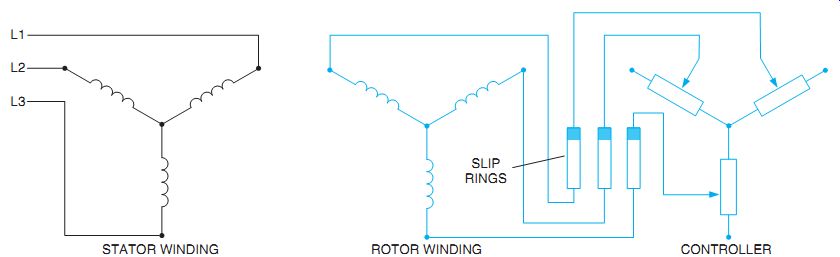
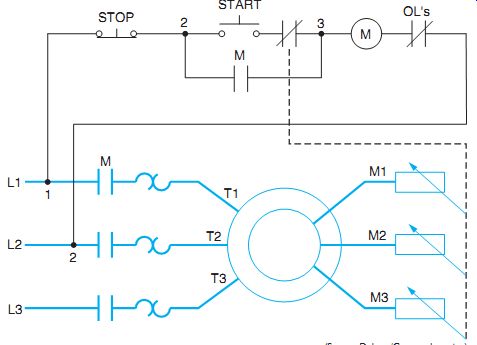
ill. 2 Power circuit: stator, rotor, and controller. ROTOR WINDING CONTROLLER
STATOR WINDING
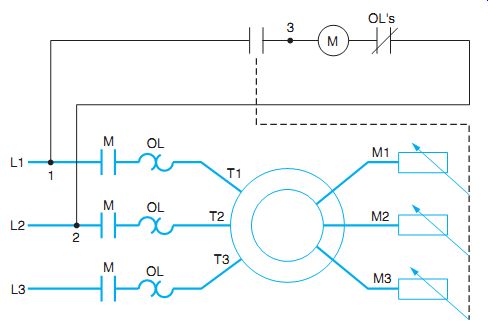
ill. 3 Manual speed regulator interlocked with magnetic starter for control
of slip ring motor (two-wire control).
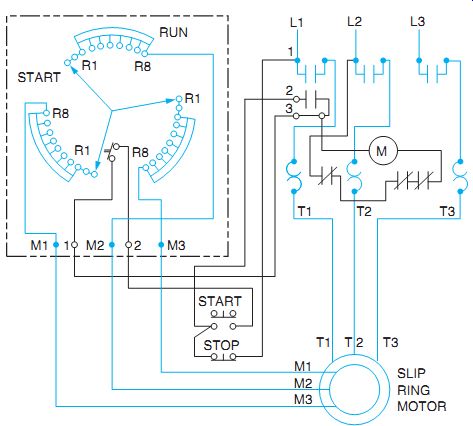
ill. 4 Wiring diagram of manual speed regulator interlocked with magnetic
starter for control of slip ring motor (three-wire control).
When starting wound rotor motors, the operating lever is moved to the first running position to insert the full value of resistance in the secondary circuit, ill. 3. This action also operates the electrical normally open contact and completes the circuit to the magnetic primary contactor.
This contactor connects the primary circuit, motor stator, to the line by closing the normally open contact (two-wire control). As the operating lever moves to the right, more and more resistance is cut out of the circuit. At the extreme right-hand position of the lever, the motor is running at full speed. Normally open or normally closed electrical interlocks control the primary magnetic switch and ensure that sufficient resistance is used in the rotor circuit for starting.
The use of two-wire control (normally open contact) for starting provides low-voltage release.
This means that power to the motor can be interrupted if the line voltage drops to a low value or fails completely. When the voltage returns to its normal value, the motor is restarted automatically. For some applications, this feature isn't always desirable.
The use of three-wire control for starting (normally closed control contact), ill. 4 and ill. 5, means that low-voltage protection is provided. The motor is disconnected from the line in the event of voltage failure. To restart the motor when the voltage returns to its normal value, the normal starting procedure must be followed. To reverse the motor, any two of the three-phase motor leads may be interchanged.
Drum controllers, ill. 6, may be used in place of faceplate starters. The drum controller, however, is an independent component; it's separate from the resistors and is used for switching or controlling external resistors. As in the faceplate starter, a starting contact controls a line voltage, across-the-line starter. Generally, the electrician must make the connections on the job site.
ill. 5 Elementary diagram of ill. 4.
ill. 6 Drum controller.
QUIZ:
1. What characteristic of wound rotor motors led to their wide use for industrial applications?
2. By what means is the rotor coupled to the stator?
3. What other name is given to the wound rotor motor?
4. Does increased resistance in the rotor circuit produce low or high speed?
5. What two separate elements are used to control a wound rotor motor?
6. What is the difference between a manual faceplate starter and a manual faceplate regulator?