AMAZON multi-meters discounts AMAZON oscilloscope discounts
GOALS:
- Describe the operating principles of DC variable-speed-control motor drives.
- State how above and below DC motor base speeds may be obtained.
- List three advantages of DC variable-speed motor drives.
- List modifications that can be made to packaged variable-speed control drives to meet specific applications.
- Connect DC variable-speed control motor drives.
- Recommend troubleshooting solutions.
Adjustable speed drives are available in convenient units that include all necessary control circuits, ill. 1. These packaged variable speed drives generally operate on AC. They provide a large choice of speeds within given ranges.
ill. 1 Packaged-type motor-generator with DC variable-speed control system
supplied from AC.
Some drive requirements are so exacting that the AC motor drive alone isn't suitable. In such cases, the DC motor has characteristics not available with AC motors. The DC motor also possesses many of the characteristics of an AC motor. A DC shunt motor with adjustable voltage control is very versatile and can be adapted to a large variety of applications.
The AC service in industrial plants must be converted to direct current for use with these controls. Smooth and easily controlled direct current is obtained through the use of the Ward Leonard system in which a DC shunt generator with field control is driven by an induction motor.
As described in previous units, electricity can be generated electromagnetically for heavy power consumption only if the following are present:
- A magnetic field
- A conductor
- Relative motion between the two
The motion in the DC variable-speed drive of ill. 2 is maintained by the steady driving force of an induction motor. The generator voltage is increased by increasing the magnetic flux in the generator field. The magnetic flux of the generator field is increased by decreasing the resistance of the field rheostat to allow more current to flow through the shunt winding. Thus, the greater the field current, the stronger is the magnetic field.
The speed and torque of the system shown in ill. 2 can be controlled by adjusting the voltage to the field or to the armature, or both.
Speeds above the motor base (nameplate) speed are obtained by weakening the motor shunt field with a rheostat or electronically. Speeds below the motor base speed are obtained by weakening the generator field. This, in turn, lowers the generator voltage supplying the DC motor armature. The motor should have a full shunt field for speeds lower than the base speed to give the effect of almost continuous control, rather than step control of the motor speed.
The motor used to furnish power from the line may be a three-phase induction motor, as shown in ill. 2, or it may be a DC motor.
Once the driving motor is started, it runs continuously at a constant speed to drive the DC generator.
The armature of the generator is coupled electrically to the motor armature as shown. If the field strength of the generator is varied, the voltage from the DC generator can be controlled to send any amount of current to the DC motor.
As a result, the motor can be made to turn at many different speeds. Because of the inductance of the DC fields and the time required by the generator to build up voltage, extremely smooth acceleration or deceleration is obtained from zero RPM to speeds greater than the base speed.
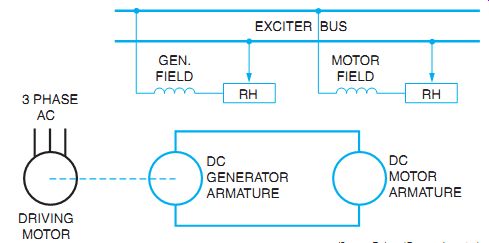
ill. 2 Basic electrical circuit of a DC variable-speed control system.
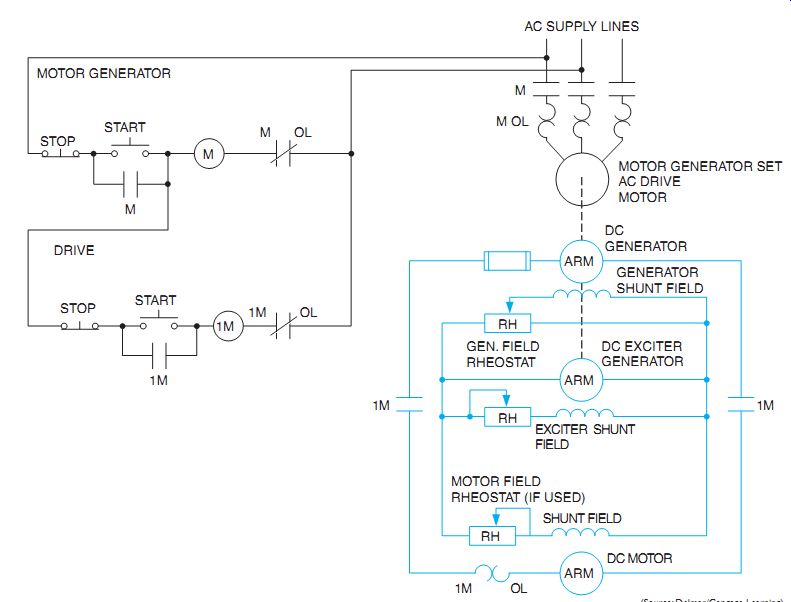
ill. 3 Electrical power and control connections for DC variable-speed control
system.
The field of the DC generator can be reversed manually or automatically with a resulting reversal of the motor rotation.
The generator field resistance can be changed manually or automatically by the time-delay relays operated by a counter emf across the motor armature.
Electrically controlled variable-speed drives offer a wide choice of speed ranges, horsepower and torque characteristics, means for controlling acceleration and deceleration, and methods of manual or automatic operation. A controlling tachometer feedback signal may be driven by the DC motor driveshaft. This is a refinement of the system to obtain constant speed. The choice of this method depends on the type of application, the speed, and the degree of response required (similar to the magnetic drive automatic control).
In addition to speed, the controlling feedback signal may be set to respond to pressure, tension, or some other transducer function.
The circuit used with a motor-generator set to obtain adjustable voltage is shown in ill. 3. In this circuit, the exciter has closed connections. An AC motor, usually a squirrel cage motor, drives the DC generator and exciter. The exciter may be operated as a self-excited machine and set to give constant potential output.
The generator field is connected directly across the constant potential exciter. The motor field may be weakened to provide speeds above the base speed after the generator voltage is increased to its maximum value.
The motor-generator set has one inherent advantage over rectifier-type DC supplies, that's , the ability to regenerate.
In ill. 3, assume that the generator rheostat is set at its maximum point and the motor is running at base speed. If the generator voltage is decreased by adjusting the rheostat, the motor counter voltage will be higher than the generator voltage and the current reverses.
This action results in a reverse torque in the machine and the motor slows down (dynamic braking). This dynamic braking feature is very desirable when used on metal working, textile and paper processing machines, and for general industry use.
MODIFICATIONS:
To meet specific operating requirements, the packaged variable-speed control drives can be furnished with a variety of modifications, including provisions for:
++ Multimotor drive
++ Reversing by reversing the generator field
++ Reversing by motor armature control
++ Dynamic and regenerative braking
++ Motor-operated rheostat operation
++ Preset speed control
++ Jogging at preset reduced speed
++ Current or voltage (speed) regulation
++ Timed rate of acceleration and deceleration
++ Current-limit acceleration and deceleration
The generator field resistance can be changed manually or automatically by time relays operated by a counter emf across the motor armature. Motor-operated rheostats can also be used in automatic speed control operations.
One or more of these modifications can be combined as required by the specific application.
Some control schemes eliminate the standard exciter and provide other methods of energizing the generator and motor fields. Some systems eliminate the motor-generator set entirely and supply the armature and field power through controlled rectifiers directly to the motor from AC lines.
QUIZ:
1. What is meant by the base speed of a DC motor?
2. How is above base speed obtained?
3. How is subbase speed for a DC motor obtained?
4. What advantage does the motor-generator type of variable-speed drive have over rectifier-type DC supplies?
5. If the AC driving motor of a self-excited motor-generator set is reversed, does this reverse the direction of rotation of the DC motor? Explain.
6. How does reversing the generator polarity reverse the connected motor or motors?
7. Why should the motor have a full shunt field for below-base speed operation?
8. To increase generator voltage: (a) Should the resistance of the rheostat be increased or decreased? (b) What change in current condition is required in the shunt field? Why?