AMAZON multi-meters discounts AMAZON oscilloscope discounts
GOALS:
- Discuss the operation of the input/output modules, the central processing unit, and the operator programming terminal.
- Draw basic diagrams of how the input and output modules function.
- Convert a motor starter elementary drawing to a schematic used for programming a programmable controller.
- Connect some pilot and control devices to input/output modules.
- Discuss installation requirements for a programmable controller.
- Discuss the use of the PLC programmer circuit on and off display.
- Describe some different motors used in automated systems.
- Describe a modern motor control center.
PROGRAMMABLE CONTROLLERS
If you set your alarm clock or clock radio to wake your household in the morning, you have programmed a controller. Programmable controllers range in size from small, versatile controllers that run single machines, to large, complex controllers that oversee entire control networks.
A programmable controller is a solid-state, electronic microprocessor-based control system used widely in industry. The system monitors input signals to detect changes from connected sources such as push buttons, limit switches, and condition sensors. Based on the status of input signals, the controller system reacts by means of user-programmed internal logic. The reaction is to produce output signals to drive external loads such as control relays, motor starters, contactors, and alarms or annunciators, ill. 1.
Because of their flexibility, accuracy, and economy, more control needs are being met by programmable controllers (PCs) in industry. PCs are available in all sizes. Small ones are equal to as few as five relays, ill. 2. The controller shown in ill. 2 is specifically designed for use in automated process control and /or machine control. Large units are equal to thousands of inputs and outputs. This type of control system is widely used in batch processing and special machine control applications. By simply changing an "elementary ladder diagram" stored in the microcomputer logic, program changes are made, thereby changing the process control functions or the machine control applications. The system controls the valves that will open or close and the specific motors that will run at predetermined speeds. Programmable controls are cost competitive with "hard-wired" controls in many applications. They have the added advantage of programmability. Hard-wired systems must be rewired to suit changing control situations.
Process manufacturing (food, chemicals, petroleum, and paint, for example) requires different blends for varying brands of a product. PCs are standard components for many completely auto mated machines being used in industry.
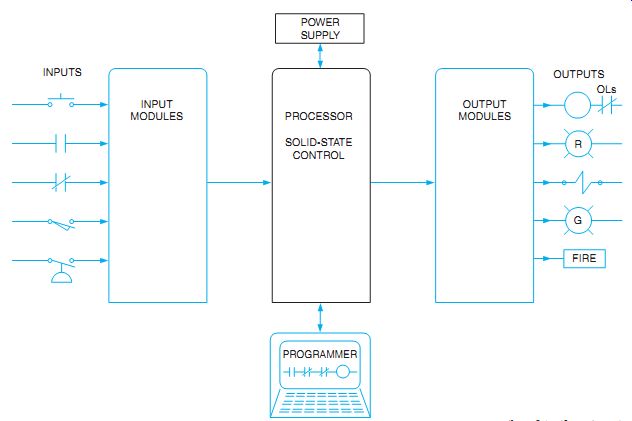
Ill. 1 Based on input signals and the program entered into the processor,
the output is controlled.
Ill. 2 Small programmable controller with input/output track, designed for
use in automatic process control. (Eagle Signal Controls)
Power Supply
L1 and L2 still mean line one and line two. This AC input is converted to low DC voltages for internal circuit use. The voltage is then filtered and regulated to free the system of any electrical spikes and noise. It might still be necessary to install an isolating transformer.
Some PC manufacturers may recommend installing noise suppressors on all magnetic switches being used with their system. Always pay close attention to the manufacturer's installation instructions and recommended operating procedures.
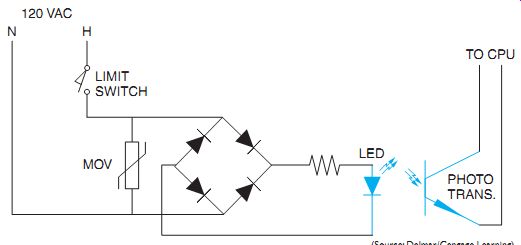
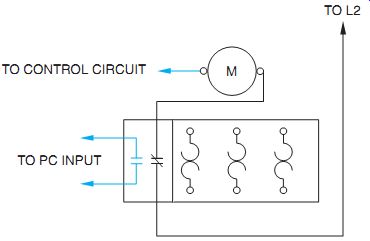
Ill. 3 Typical input circuit for a programmable controller.
Input Module
Input modules sense whether the input devices are on or off.This provides the processor module with the input status information that it needs to process a planned program. Typical input devices include pilot devices such as push buttons, limit switches, and the like. Internal circuitry includes optical relay isolation, as well as filtering and electrical surge suppression to guard against possible damage to the central processing unit (CPU) by transients from the user inputs. The input module plugs directly into the processor module. Some input modules may be remotely connected.
The schematic for a typical programmable controller input is shown in ill. 3. In this example it's assumed that the input voltage is 120 volts AC.A metal oxide varistor (M.O.V.) is used to suppress voltage spikes that can be produced on the line. A bridge rectifier converts the AC voltage into DC. A current limiting resistor is connected in series with an LED. The LED activates a photo-transistor. The photo-transistor is connected to the CPU and signals that a volt age is present or not present at that particular input. Notice that communication between the CPU and the outside control device is separated by a light beam. This is known as optical isolation or optoisolation. Optoisolation is used to ensure that no voltage spikes or electrical noise can reach the CPU.

Ill. 4 Input module wiring.
Installation
The CPU must be securely mounted to a panel or cabinet first. The input module is then plugged into the desired input/ output (I/O) port of the processor. The module is secured with the screws that are supplied with it. The module is color coded, or marked, to identify it as a 120-volt, AC-specific input module.
A corresponding identification is placed on the processor module. If the module is removed for any reason, this identification will help you identify the type of module assigned to this location.
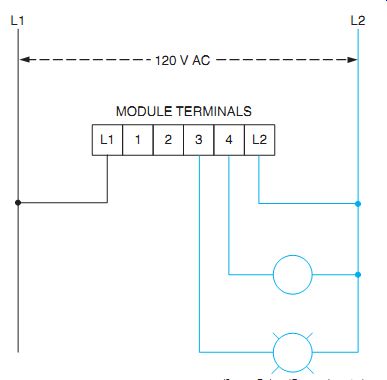
ill. 4 shows an input module on the right connected to a control unit (CPU). A typical electrical ladder connection diagram is shown in ill. 5. The wiring for the external push buttons must be brought to the PC cabinet in conduit or to comply with the NEC® requirements.
Output Module Output modules control ON and OFF status of output devices, based on commands received from the processor control unit. Typical output devices include coils for motor starters, contactors, relays, and so on. Some output modules are capable of switching starters through size 5.
Module protective circuitry is built-in like the input module. It also plugs directly into the processor unit. Status indicator lamps are available, as with the input module. A typical terminal elementary diagram is shown in ill. 6.The physical appearance is similar to that of the input module.
The device used to control the output can vary from one programmable controller to another. Some contain relay-type outputs and others employ solid-state output devices. If the relay-type output is used, the CPU controls the coil of the relay and the contacts connect the load device to the line, ill. 7.
Notice that the output of the programmable controller does not supply the power to operate the load. It simply acts as a switch or set of contacts to connect the load to power.
The type of solid-state device used in the output is determined by the type and amount of voltage the PC is designed to control. Some programmable controllers are intended to control a voltage of 120 volts AC. Others may be intended to control 24 volts AC or 24 volts DC. Low voltage controls are generally used in areas where intrinsically safe circuits are desired.
Intrinsically safe circuits are low-power circuits that can be used in areas with atmospheres that contain explosive vapors and dusts, such as refineries and chemical plants. The intrinsically safe circuits don't have enough power to ignite the surrounding atmosphere.
If the solid-state output of a programmable controller is intended to control an AC voltage, the output control device will be a triac, ill. 8.
A triac is a solid-state device similar to an SCR, except the triac is a bidirectional device that will conduct on both half cycles of the waveform. This gives the triac the ability to control an AC current. Triacs are often employed as solid-state AC switches. Notice that the output is opto-isolated to prevent any electrical spikes or noise from being able to affect the Clutha CPU actually turns on an LED. The light produced by the LED activates the gate of a photo triac.
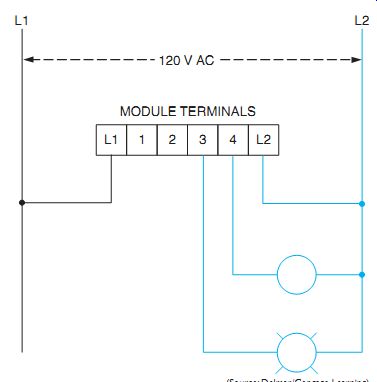
Ill. 5 Input module wiring.
Ill. 6 Output module wiring.
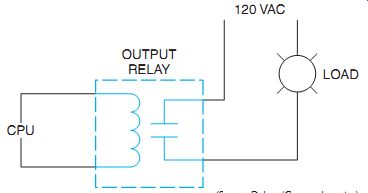
Ill. 7 Typical relay output.
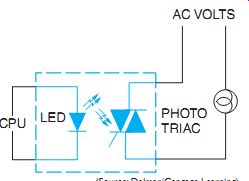
Ill. 8 A triac is used to control an AC device.
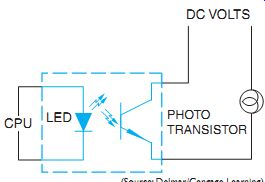
Ill. 9 A transistor is used to control a DC device.
If the output is intended to control a DC volt age, the output device will be a photo-transistor, ill. 9. Like the triac, the transistor is used as a solid-state switch to connect the load to the power line.
Processor Unit
The processor unit's the principal unit of the controller. It processes and manipulates the information entered in its memory by the opera tor terminal or programmer. Working with or interfacing with external hard-wired input and output devices is accomplished using the input and output modules. These are plugged into the I/O (input/output) ports of the processor module.
The number of input/outputs, and the capacity to handle them, determines the size of the programmable controller. Even the small processors are a maze of electronic printed circuits, transistors, and other related equipment. Both digital (on/off) and analog signals (such as voltage and current values) are acceptable to the processor.
These signals are handled differently internally but can be connected within limits.
The brain of the programmable controller is the processor. It receives all inputs, evaluates and organizes the control activity, and performs logical decisions according to the direction of the memory stored program. It then tells the output what to do. The processor module supplies operating power to the input and output modules and the operator terminal (programmer). Input and output devices must be separately powered, as may be seen in ill. 4 and ill. 6.
INSTALLATION
A user's manual is received with a new programmable controller. This manual should be consulted before installing the controller. The environmental conditions will dictate the type of enclosure required. It must be adequate and NEMA approved for a particular application. Consideration should be given to the proper location of a controller disconnect switch. An isolation transformer may also be required.
++ Check to see if the processor module power supply and the input/output devices (I/O modules) require the same AC source. The controller should be adequately grounded.
Scrape paint or other nonconductive finish from the panel surface in the bolt mounting areas. This will help ensure good electrical contact for grounding purposes when the mounting bolts are tightened.
++ Check to see if one or more emergency stop switches are to be included or recommended. The location of such switches is also an important consideration.
++ Follow the manufacturer's recommendations for component or accessory spacing within the enclosure. This is to help keep the controller temperature within safe operating limits.
++ Check to see how the wiring should be routed to minimize the effects of electrical noise.
++ Are surge suppressors to be used for inductive loads in series with hard contacts and for other noise-generating equipment?
++ Where many machines or processes are controlled by one processor, it may be economically advantageous to locate I/O modules close to the field devices. This reduces multiple-conductor runs. It also locates the I/O module indicator lights close to the machine or process for easy field monitoring and troubleshooting.
ill. 10 shows an I/O track that's wired. The module is plugged into a wired track as can be seen at the upper right. No field wiring need be removed during maintenance or changing modules in this scheme. In checking the user's manual for these few recommendations, other installation suggestions or requirements should be noted before installation.
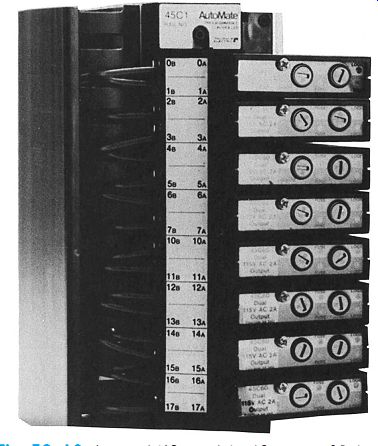
Ill. 10 A wired I/O module. (Reliance Electric)
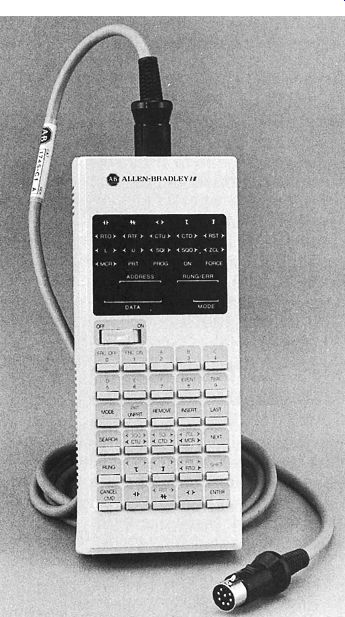
Ill. 11 Control logic can be entered into the processor from an operator program
terminal.
PROGRAMMER TERMINAL
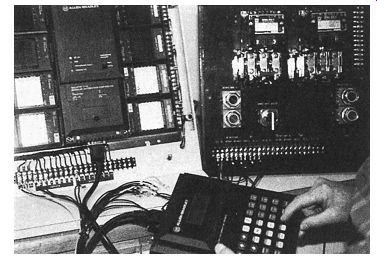
The programming unit, or operator terminal, permits information to be input to the processor through a keyboard. This input information tells the processor what to do with control loads connected to the output modules. This information includes the step-by-step circuit layout and connections. ill. 11 shows a handheld programmer terminal.
Ill. 11 Control logic can be entered into the processor from an operator program
terminal.
Programming may be accomplished either at the processor site or remote to the processor.
Many programmers use a standard laptop-type computer loaded with the proper software to develop the program. Once the program has been developed it can be saved to a disk, CD, or other storage device. Special hardware devices that permit the computer to be connected directly to the programmable controller permit the program to be loaded, monitored, or changed using the computer. The actual pro gram is generally done using the standard relay ladder logic format. The program is developed using symbols for normally open or normally closed contacts and coils. Elementary ladder diagramming ability is essential.
All pilot devices are programmed as normally open or normally closed contacts. There are no keyboard symbols for limit, float, or pressure switches. The processor does not know what is closing a switch, only that it's open or closed. Contacts are assigned numbers to distinguish them.
Because elementary ladder diagrams (refer to Units 4 and 5) follow a logical process, programming a PC shouldn't be difficult. E.g., a three-wire, start-stop control circuit's shown in ill. 12(A). ill. 12(B) shows how this same circuit will appear as it's programmed into the processor, through the program operator terminal. ill. 13 shows how these component parts are connected to the input/output (I/O) modules. Note that the starter has been rewired to bring the overload contact to the left control side. The maintaining contact is an "internal relay" of the PC. Note also in ill. 12(B) that the normally closed stop button and the normally closed overload contact appear as normally open.
Because terminals 1 and 3 are normally closed contacts, power will be fed to the input module, or track. When this occurs to the input module, the central processor interprets it as an instruction to change the position of the contact that matches the terminal number of the input module. Contacts 1 and 3 are considered closed by the processor during normal operation, because power is fed through the normally closed contacts. Because a coil will always end the line of a program, overload contact 3 is moved to the left of the coil, where you would place any con tact that controls the coil. Note the programmer coil symbol looks like this: After a circuit's energized, these symbols will assume a cross hatch shading, or other distinctive feature as shown in ill. 14. This tells you that the contacts are closed properly and the coil is energized. This feature is also useful for troubleshooting the control system in case of a malfunction.
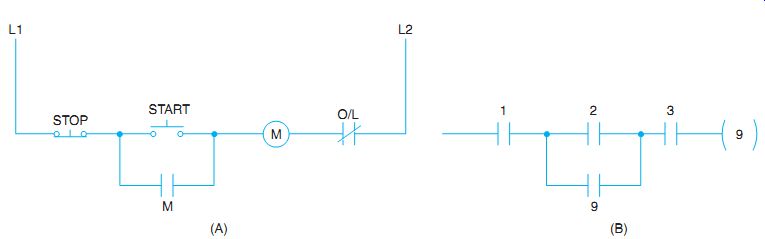
Ill. 12 (A) A three-wire electromagnetic ladder diagram circuit. (B) As it
appears on the program operator terminal.
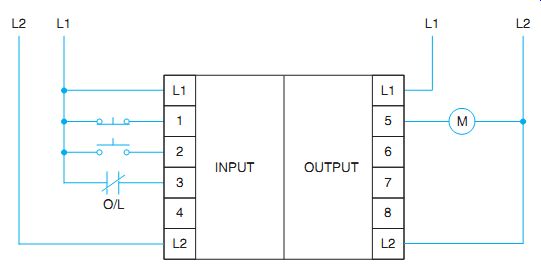
Ill. 13 PC connections for start-stop station.
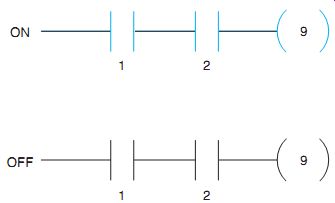
Ill. 14 Program operator display of a coil circuit.
Ill. 15 PC connected to a motor starter on a student work panel.
ill. 15 illustrates the actual motor starter connection just described. All I/O module wiring is brought down to the terminal board connections and marked. The operator terminal is plugged into the bottom of the central processor unit. The motor starter is on the student motor control laboratory panel at the right.
Different manufacturers use different methods of programming their controllers. Therefore, it's necessary to study and follow the instruction manual that accompanies a programmable controller.
Developing a Circuit
The next circuit to be discussed and constructed is a simple elevator circuit. It is assumed that the elevator is operated by a three phase motor that runs in forward direction when the elevator goes up, and runs in the reverse direction when the elevator goes down. Limit switches labeled LS1, LS2, and LS3 are used to indicate when the elevator has reached a particular floor; LS1 is for the first floor, LS2 is for the second floor, and LS3 is for the third floor. Pilot lights also are used to indicate when the elevator is at a particular floor. A red light is used for the first floor, a yellow light is used for the second floor, and a green light is used for the third floor.
Ill. 16 First- and third-floor control.
Ill. 17 Elevator control circuit.
Developing the Circuit Logic
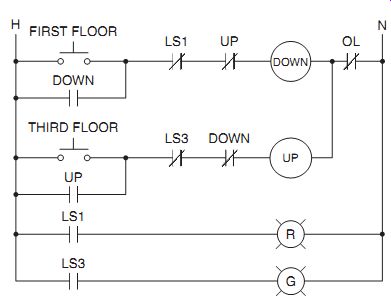
The control needed for the first and third floors is relatively simple because the elevator must always go down to reach the first floor and always go up to reach the third floor. This control can be accomplished by starting the motor up or down and permitting the appropriate limit switch to stop the motor when it reaches the designated floor. Interlocking is also a necessity to prevent the UP and DOWN motor starters from being energized at the same time. A circuit of this type is shown in ill. 16.
When the third-floor push button is pressed, the UP starter energizes and the elevator starts up. When it reaches the top, limit switch LS3 opens and stops the motor. At the same time, the normally open LS3 contact closes and turns on the green pilot light to indicate the elevator is on the third floor. When the first-floor push button is pressed, the DOWN starter is energized and the elevator starts moving in the downward direction. When the elevator reaches the first floor, the normally closed limit switch LS1 opens and stops the motors and the normally open LS1 limit switch closes and turns on the red pilot light.
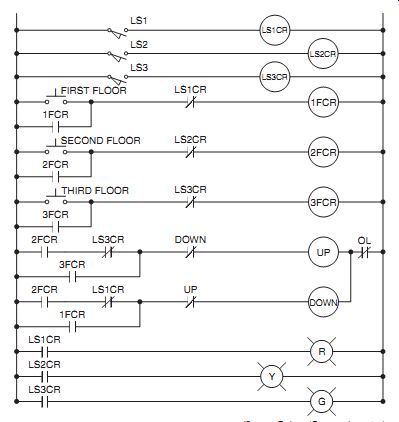
The addition of the second-floor control, how ever, greatly increases the complication of the circuit as shown in ill. 17. Now that the second floor is added to the circuit, the logic of the control system must be such that if the elevator is located on the first floor and the second-floor push button is pressed, the elevator will proceed up. If the elevator is located on the third floor and the second-floor push button is pressed, the elevator will proceed down. The three limit switches used to detect the location of the elevator must now have more contacts than are generally provided on the switch.
Limit switch LS1 must have two normally closed and one normally open contacts, limit switch LS2 must have one normally closed and one normally open contacts, and limit switch LS3 must have two normally closed and one normally open contacts. To supply the necessary contacts, each limit switch will be used to control the coil of a control relay. Limit switch 1 controls the coil of limit switch 1 control relay (LS1CR), limit switch 2 controls the coil of LS2CR, and limit switch 3 controls the coil of LS3CR. Control relays are also used in the remainder of the circuit logic. The first-floor push button, for example, controls the coil of the first-floor control relay (1FCR), the second-floor push button controls the coil of 2FCR, and the third-floor push button controls the coil of 3FCR. These control relays are used to control the action of the two motor starters designated as UP and DOWN.
Changing the Circuit for PC Operation
The relay circuit shown in ill. 17 will now be changed so it can be loaded into the memory of the programmable controller. Before the circuit can be developed, the inputs and outputs must be signed. This circuit contains seven inputs and five outputs. Because different types of programmable controllers assign different numbers for input and outputs, it will be necessary to assume input numbers, output number, and internal relay numbers for this particular controller. The chart in ill. 18 lists these assigned numbers.
The Overload Relay
INPUTS 1 THROUGH 10 11 THROUGH 20 100 THROUGH 200 OUTPUTS INTERNAL RELAY
In the schematic shown in ill. 17, an overload contact is connected to the output side of coils UP and DOWN. Because each line of logic for a programmable controller must end with a coil, the overload contact must be moved to a position behind coils UP and DOWN. Also, both the UP and DOWN coils must be protected by the overload. In this circuit, it will be assumed that the overload relay that controls the action of the overload contact contains two auxiliary contacts instead of one. One contact is normally closed and the other is normally open, ill. 19. This type of overload relay is becoming very common because it permits the coil or coils of starters to be connected in series with the normally closed contact and the normally open contact can be used to control indicator lights or, in this case, to supply a signal to the input of a programmable controller. In this way, the motor is protected by a hard-wired con tact in the event of an overload, and the programmable controller can be informed that an overload has occurred. Before a program can be developed, it's necessary to first determine which control device is connected to which input and which controlled device is connected to which output. The input and output assignments are as follows:
First-floor push button input 1 Second-floor push button input 2 Third-floor push button input 3 LS1 limit switch input 4 LS2 limit switch input 5 LS3 limit switch input 6 NO overload contact input 7 Motor starter (forward) output 11 Motor starter (reverse) output 12 Red pilot light output 13 Yellow pilot light output 14 Green pilot light output 15 In the relay circuit, it was necessary for the limit switches to control the coils of control relays in order to increase the number of contacts operated by each limit switch. Programmable controllers, however, don't have this problem. Any number of contacts can be controlled by a single input, and the contacts can be programmed as normally open or normally closed. Therefore, control relays LS1CR, LS2CR, and LS3CR are not needed in the circuit logic. However, the control relays for the floors, 1FCR, 2FCR, and 3FCR, are needed. Internal relay coil 101 is used for 1FCR, coil 102 is used for 2FCR, and coil 103 is used for 3FCR. The revised control schematic for this circuit's shown in ill. 20.
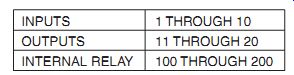
Ill. 18 Assignment numbers for PC.
ill. 19 The normally open OL contact connects to programmable controller input.
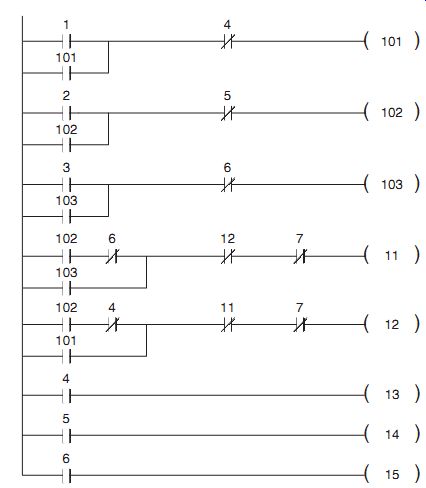
Ill. 20 Elevator circuit for programmable controller.
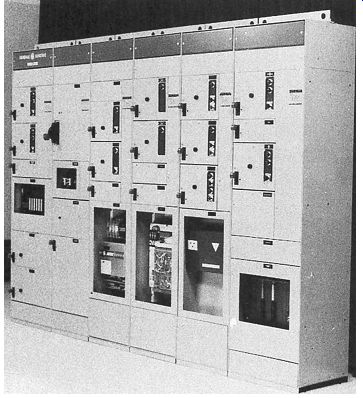
Ill. 21 Modern motor control center. (General Electric Co.)
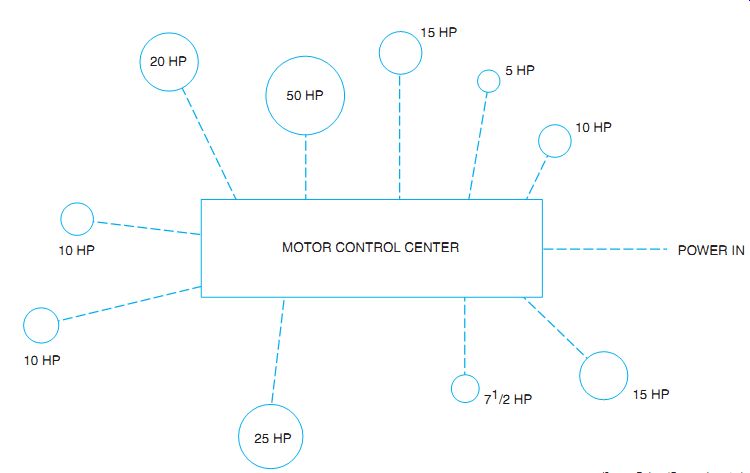
ill. 22 Underground distribution of a motor control center (floor plan).Motor
circuits may also be run overhead.
MOTORCONTROLCENTER
A modern motor control center combines the latest automation technologies, such as programmable controllers, solid-state starters, and AC and DC variable speed drives, in a common enclosure. One center is shown in ill. 21. The control center receives incoming power and distributes it to all motors under a controlled and protected process from one location. See ill. 22. This center is especially convenient for PC installations with many inputs and outputs. Existing electro magnetic motor control centers are readily adapted to PC control. The wiring is already installed to terminal blocks. The control center is simply rewired to a PC.
MOTION CONTROL
Electric motors do more than turn heavy industrial machinery. Motion control is a term usually given to small motors that are used for small incremental movements, for positioning, assembly, or processing. Some are used in industrial robot/automated machines.
Many are so small that they are sometimes called electronic motors because they are driven by fine electronic, precision controllers to achieve precise movements. Although the size of such motors may start at about 1/8 horsepower, some range as high as 2 and 5 horsepower. Several types of motors are used with industrial robots and other auto mated machinery.
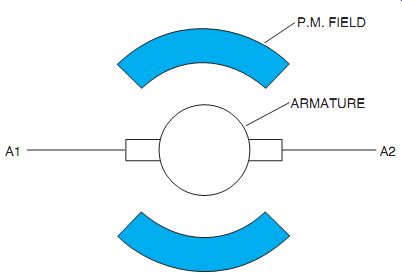
Ill. 23 DC permanent magnetic motor.
Permanent Magnet-DC Operated
Permanent magnet motors have a conventional wound armature with a commutator and brushes and a permanent magnetic field, Ill. 23. This motor has excellent starting torque with speed regulation just under that of compound motors. Because of the permanent field, motor losses are less and better operating efficiency is obtained. These motors can be dynamically braked and can be reversed at a low voltage (10 percent). They shouldn't be plug reversed with full armature voltage.
Reversing current can be no higher than the locked armature current.
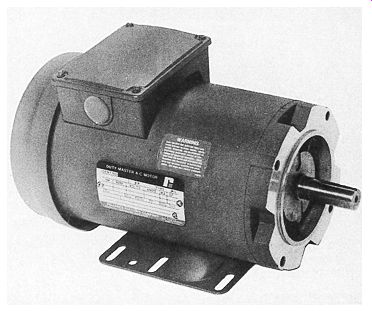
ill. 24 Permanent magnet synchronous AC motor. (Reliance Electric)
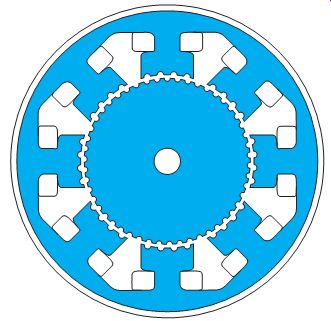
Ill. 25 Cross section of a typical stepper motor showing toothed construction
of the armature and stator. Signal pulses in serial order advancing sequentially
from one field to an adjacent field drive the stepper motor.
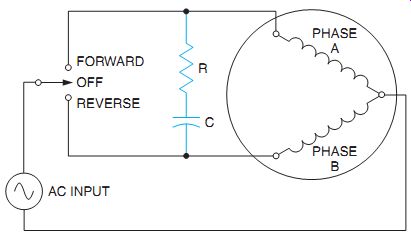
ill. 26 Phase shift circuit converts single phase into two phase.

ill. 27 Stepping motor.
Permanent Magnet Synchronous Motor-AC
Permanent magnet synchronous motors are AC motors that eliminate the slip characteristic of induction motors, ill. 24.
They operate at exactly the synchronous speed of the three-phase power speed, usually 1800 or 3600 rpm. High-density magnets are imbedded in the rotor. Permanent mag net synchronous AC motors are ideally suited for processes requiring accurate speed control or synchronizing of several interconnected operations.
STEPPER MOTORS
The stepper or stepping motor is a precision electromechanical incremental actuator. It uses the digital (on/off) approach for control of industrial machines. It delivers precise incremental motions of great accuracy. Its popularity is broadened by using it with programmable controllers. The stepper motor is DC with a permanent magnet rotor and a wound stator (field).
Both rotor and stator are toothed, like small fields in themselves, ill. 25. The basic feature here is that the motor will move when energized and come to rest at any number of steps, in either direction. It is adequate for light loads and PC driven applications, and for positioning applications in many forms. It moves and stops according to the digital commands from the PC. The stepper motor converts programmed digital pulse inputs into a series of motions; sequential, fast or slow, forward, and reverse.
Most stepping motors require 400 increments or steps to turn the shaft 360 degrees, resulting in 0.9 degree of rotation per step. They have an accuracy of approximately _5 percent per step, and the error isn't cumulative regardless of the number of steps. Because step ping motors have permanent magnet rotors, they have the ability to provide holding torque when the motor is turned off. If greater holding torque is desired, continuous DC voltage can be applied to the motor. If DC voltage is applied to only one winding, the holding torque will be approximately 20 percent greater than the rate running torque. If DC voltage is applied to both stator and winding, the holding torque will be approximately 150 percent greater than the rate running torque.
It is also possible to operate stepping motors on two-phase alternating current. An eight-pole stepping motor becomes a synchro nous motor with a speed of 72 rpm when connected to 60 Hz. The two phases can be formed from single phase with a phase splitting circuit as shown in ill. 26.When stepping motors are operated as synchronous motors they can start, stop, or reverse direction of rotation virtually instantly. They will start and obtain full speed within approximately 1½ cycles and stop within 5 to 25 milliseconds.
A stepping motor is shown in ill. 27. An exploded diagram of a stepping motor is shown in ill. 28.
SELF-SYNCHRONOUS (SELSYN) TRANSMISSION SYSTEM
The self-synchronous transmission system is called "selsyn," an abbreviation. It is a system used for transmitting, by electrical means, any signal that can be represented by angular position. The great advantage of this system over other systems of electrical transmission of mechanical motion is that it's self-synchronizing.
Selsyn units can control the motion of a remote device at a distant point by controlling its actuating mechanism.
E.g., when the transmitter unit's moved to a point (manually, electrically, or mechanically), the receiver will move to this identical point through simple wiring. A good example of this system is probably one of the most common and the oldest uses, a ship's engine order. When the ship captain moves his engine order (transmitter) to a specific desired speed, this is duplicated in the engine room with a pointer rotated by the selsyn receiver, thereby duplicating the captain's direction.
These units look like common small motors and are also called synchros. They are connected together by conductors through necessary switches. See a simple connecting diagram in ill. 29.
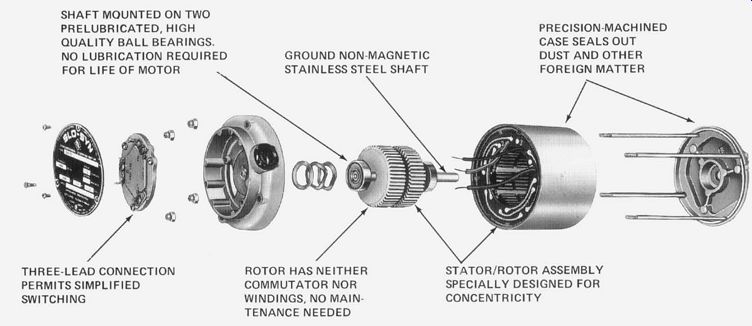
Ill. 28 Exploded diagram of a stepping motor.
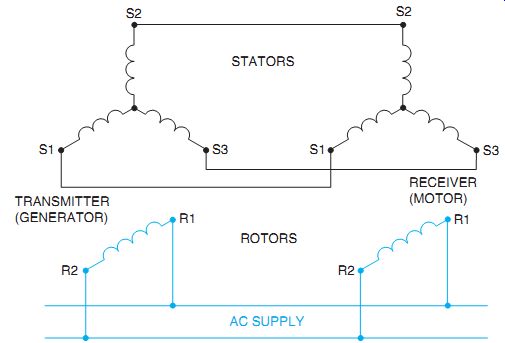
Ill. 29 Diagram of connections for a simple selsyn system.
Operation
The diagram shows interconnected stator, "S" terminals, and rotor, "R" terminals. Note that only the rotors are connected to the AC power source. Assuming both rotors are free to turn, they will take such a position that the voltages induced in the two stators are of balanced magnitude and displacement.
Under this condition of stator voltage balance between the two instruments, there is no circulating current in the stator windings.
Now, if the rotor of one selsyn unit's displaced by a certain angle and the rotor of the other is held in its original position, the stator voltage balance is altered and a circulating current will flow in the windings. This circulating current reacting on the excitation flux provides a torque tending to turn the rotors of the machines to a position where the induced stator voltages are again equal and opposite. Thus, with both rotors unrestrained, any motion given to the rotor of one synchro unit will be transmitted to and duplicated by the rotor of the second, and we have a system for transmitting mechanical motion for positioning.
If the transmitter rotor is turned, either manually, mechanically, or by some other electrically operated means, the receiver rotor will follow at the same speed and in the same direction as the rotors induce voltages into their three windings of their stators. The self-synchronous alignment of the rotors is the result of voltages induced in the secondary stator windings.
A synchro unit draws but little power from the line and is designed for continuous duty excitation.
It has been the custom to call the selsyn unit, which is used as the transmitter, a synchro (selsyn) generator, and the remote, or receiving, unit a selsyn motor. The one does not generate electrical power nor does the other transform it into mechanical motion. The self-synchronous systems merely transmit mechanical motion.
Neglecting friction losses, the mechanical power output of the receiver is exactly equivalent to the mechanical power input to the transmitter. Electrically, the selsyn generator is identical to the motor. Physically, they differ in that the motor has mounted on its rotor shaft an oscillation damper. Thus, there is large dampening effect of the oscillating rotor and its movement is quickly stopped.
Multiple Operation
The system may also be used for multiple operation; that's , several selsyn motors may be operated by a single transmitter. The operation is in general the same as in the simple single transmitter and receiver system.
There are many different kinds and configurations of this basic system.
Application
A good number of factories have installed computer-based systems to keep abreast of growing demands for sophisticated manufacturing technology. Servomechanism devices, as different types of integrated electric motors, activated by electrical or mechanical impulses, automatically operate machines. The human fascination with machines that can move under their own power evolved into the science of robotics-a manufacturing technology currently applied to the production of automobiles, refrigerators, aircraft, and much more. The term servomechanism arises from numerous robotic functions that per form desired applications.
Those manufacturers who invested in auto mated technology have affirmed the robot's ability to support heavy production demands.
Thus, the demand for high-technology manufacturing with computer-controlled machines and robots will increase dramatically.
QUIZ:
1. Sketch the major components of a programmable controller.
2. Briefly describe a programmable controller.
3. What familiar method of programming is often used for a programmable controller?
4. Discuss some basic installation requirements for a programmable controller.
5. What is the major advantage of the lighted "on" or "off" program entered into the program terminal?
6. What is a modern motor control center?
7. What are the primary characteristics of a stepper motor?
8. What do selsyns look like?
9. In selsyn motors, AC power is connected to what?
10. Explain optoisolation.
11. If a programmable controller is designed to control output devices rated at 120 volts AC, what electronic device is used to connect the load to the line?
12. If a programmable controller is designed to control output devices rated at 24 volts DC, what electronic device is used to connect the load to the line?