AMAZON multi-meters discounts AMAZON oscilloscope discounts
GOALS:
- Describe what is meant by the process of dynamic and regenerative braking.
- Describe the general series of controller connections that can be made to obtain hoisting, lowering, and braking operations at different speeds.
- List several advantages of dynamic and regenerative braking.
- Describe three methods of providing dynamic braking for light-duty equipment.
- Explain how dynamic braking can be provided for a synchronous motor.
- Connect motors and dynamic braking controllers.
- Recommend troubleshooting solutions for dynamic braking problems.
A motor can be stopped by disconnecting it from the power source. A faster means of stopping a motor is achieved if the motor is reconnected so that it acts as a generator. This method of braking is called dynamic braking.
When a DC motor is reconnected so that the field is excited and there is a low-resistance path across the armature, the generator action converts some of the mechanical energy of rotation to electrical energy (as heat in discharge resistors). The result is that the motor slows down sooner. However, as the motor slows down, the generator action decreases, the current decreases, and the braking lessens. This means that a motor cannot be stopped by dynamic braking alone.
A motor driving a crane hoist will let the load down too quickly if it's simply disconnected from the line. Some kind of braking is essential.
A slight variation of the dynamic braking method just described works very well for this situation.
A series motor is used because of its characteristics for lifting and moving heavy loads. An electric brake connected in the line keeps the motor shaft from turning when there is no line current. To stop the hoist, therefore, it's necessary only to open the circuit to the motor.
To lower a load, the motor is reconnected as a shunt generator. That is, the series field is connected in series with a resistor. The combi nation is then connected directly across the line. Other possible connection schemes for series motors may be used.
The armature may be connected to a resistance to obtain dynamic braking as described earlier. It is more satisfactory, however, to connect the armature to the line as well. As a result, some of the mechanical energy is put back in the line as electrical energy. This means that the resistors are not required to handle as much heat. It also saves electrical energy. This process is called regenerative braking.
Regenerative braking is available on nearly all DC solid-state adjustable speed drives. The solid-state system provides a very precise con trolled stop for those applications in which such control is essential. Unlike the nonregenerative system, which provides a coasting stop, the regenerative system uses the motor's braking force for a more controlled, faster stop. Where such precise control isn't essential, and the additional cost of the regenerative system isn't economically practical, a nonregenerative system can be used. With a regenerative system, there are twice as many SCR cell stacks within the same panel enclosure, such as those used in the DC solid-state adjustable speed drives.
In an electromagnetic system, the control is moved from the hoisting or lowering positions to the stop position. The load should be slowed by dynamic braking before the mechanical brake takes hold. In this way, wear is reduced on the mechanical brake bands.
The schematic diagrams in Ill. 1 show how the controller connections can be changed to obtain the hoisting, lowering, and braking operations at different speeds. To simplify these diagrams, the control contactors and other components have not been shown.
For maximum hoist operation, Ill. 1(A), the DC series motor and the brake receive the full line voltage and the maximum current.
In the intermediate hoist position, Ill. 1(B), the motor is slowed when a resistor is added in series with the motor. The resistor isn't large enough to allow the brake to set or drag, however.
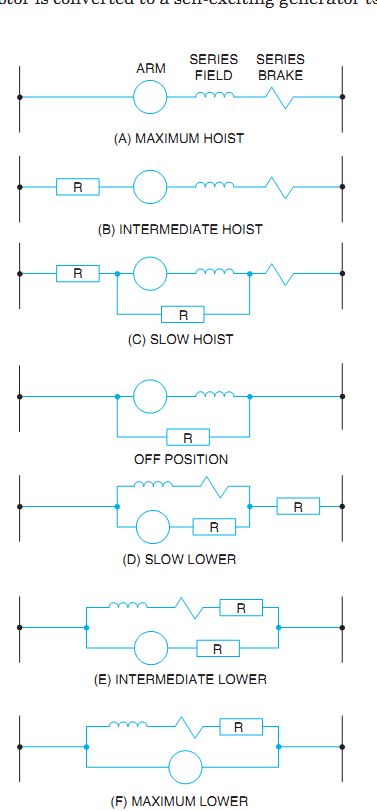
ill.-1 Reconnecting a crane controller for different operations.
In the slow hoist position, Ill. 1(C), some current is bypassed around the motor by the parallel resistor. As a result, the motor is slowed and the brake receives enough current to remain open.
In the lower positions, ills 1(D) through 1(F), regeneration back into the supply system is possible. The dissipating resistor regulates the field and the brake. The brake is de-energized in the off position with maxi mum braking pressure applied.
Dynamic braking is a simple and safe method of emergency or safety braking. Because the motor is converted to a self-exciting generator to provide the slowing action, the braking does not depend on an outside source of power. Machines operating at higher speeds have braking problems not found with lower operating speeds. The need for a more rapid initial slowdown is essential if accidents are to be avoided. Dynamic braking is applied in about 1/5th the time required to set the majority of shunt brakes.
Due to space limitations, some drives cannot be equipped with electric brakes. In other cases, the inertia of the brake wheel is objectionable because it retards acceleration and deceleration.
An advantage of dynamic braking is shown in applications such as outside cranes or ore bridges where wet or icy rails cause the wheels to slip during stopping. When the wheels slip, the dynamic braking decreases, the wheels begin rotating again, and the crane or bridge is stopped in a shorter distance than is possible with locked wheels.
On high-speed drives, it's recommended that dynamic braking be provided to reduce the drive speed to a low value before the brakes are set. An example is an ore bridge trolley where severe braking may endanger the operator.
Dynamic braking can be started by track type limit switches installed in the end zones of overhead traveling cranes. Cranes and other equipment having this type of dynamic braking can be stopped quickly and automatically when there is a power failure or the overload relays trip, regardless of the position of the master control handle. The braking torque is equally effective in both directions of travel.
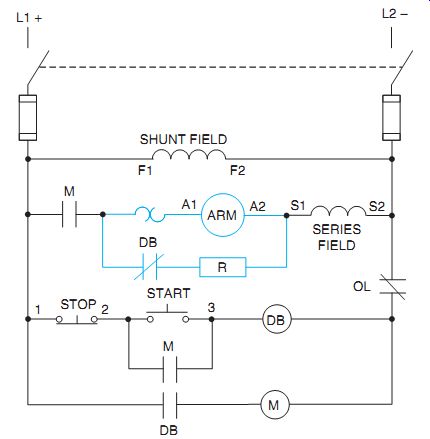
ill. 2 Dynamic braking connections on a motor starter.
ill. 3 DC motor starter modified with dynamic braking.
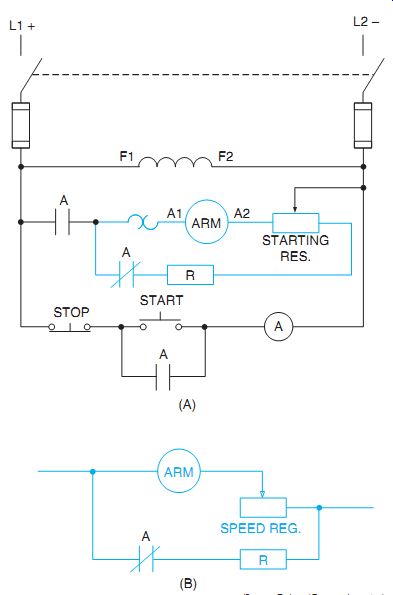
ill. 4 Using the starting resistance for braking.
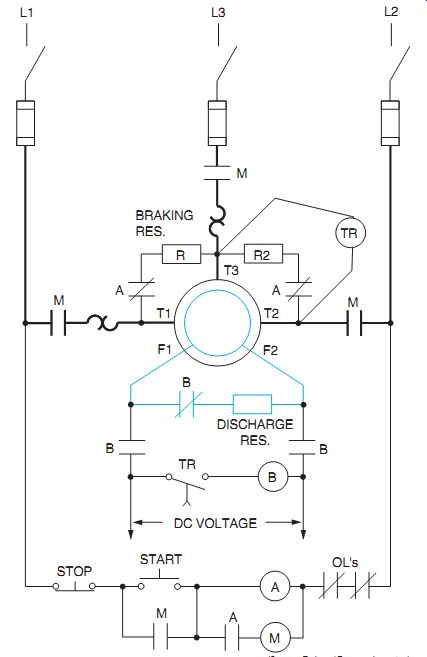
ill. 5 Dynamic braking applied to a synchronous motor.
DYNAMIC BRAKING FOR LIGHT-DUTY EQUIPMENT
There are many different methods of providing dynamic braking for small production equipment. For the diagram in Ill. 2, the reduced voltage starting mechanisms are not shown to simplify the diagram. When the stop button is depressed, normally closed contact A completes the braking circuit through the braking resistor. Note that the shunt field must be energized for both deceleration and acceleration. Full field strength must be available for both. If a rheostat is used in the shunt field for speed control, the resistance is cut out manually or automatically. The disconnect switch should be open when the machine isn't in service.
Ill. 3 is a modification of Ill. 2.
The circuit in Ill. 3 ensures that the braking resistor isn't connected across the line.
If the series field is used in the braking circuit, the DC compound motor characteristic (differential or cumulative) must be determined. If it's a cumulative compound motor, then the series field current direction must be reversed when it's used in the braking circuit. Automatic operation can be provided for such an action.
Ill. 4(A) shows a diagram for a braking circuit which uses the starting resistance for braking. This circuit may be satisfactory for a number of situations if the starting and stop ping cycle does not exceed the capacity of the resistors. A speed regulator is designed for continuous-duty operation. The fixed resistor (R) in the braking circuit's a current-limiting resistor.
It may not be required when a speed regulator is used because of the increased capacity. Ill. 4(B) shows the control circuit for adjusting the braking speed. Resistor R is a current limiting resistor, which prevents a short circuit on the armature. The value of R is selected so maximum braking speed is obtained when all resistance is cut out by the speed regulator.
DYNAMIC BRAKING FOR A SYNCHRONOUS MOTOR
Because of the similarity in the construction of a synchronous motor and an alternator (AC generator), a synchronous motor can be reconnected as an alternator to provide faster stopping. The kinetic energy of the rotor and the driven machine is converted to electrical energy by generator action and then to heat by the dissipating resistors. A method developed by the author for the dynamic braking of a synchronous motor is illustrated in the elementary diagram of Ill. 5. When the start button is pressed, contactor A is energized and opens the resistor circuits connected to the motor leads in the control panel. Contactor A energizes coil M to maintain the circuit and start the motor across the line. Time-delay relay coil TR is energized and its timing cycle begins. After the motor is brought up to speed by the windings in the rotor, the normally open, delay-in-closing con tact (TR) energizes the DC contactor (B) to sup ply current to the field. The field discharge resistor circuit's opened as well. When the stop button is pressed, the AC supply is removed from the stator. The timer coil, however, remains energized so that its contact remains closed. As a result, direct current continues to flow through the rotor. As the rotation continues, the magnetic lines of force of the rotor cut across the stator windings to generate a cur rent. This current keeps the timing relay con tact (TD) closed. The contact remains closed as long as the rotor maintains a voltage drop across the braking resistor (R2). Direct current is removed automatically from the rotor when it's almost at a standstill. This timed, semiautomatic method of synchronizing was selected to illustrate this method of braking for reasons of simplicity. With a simple modification, it's readily adaptable to any completely automatic, synchronizing control system.
QUIZ:
1. After dynamic braking occurs, why is a mechanical brake generally necessary?
2. What becomes of the energy used to brake the motor dynamically for the two methods described?
3. Referring to Ill. 1, what will happen if the controller is placed in the off position from a maximum lower position?
4. The brake in Ill. 1 isn't shown in the off position. Why?
5. Why is it necessary to open the disconnect switch when the machine isn't in operation (Ill. 2)?
6. Why may it be necessary to reverse the polarity of the series field of a compound motor if it's used in the dynamic braking circuit?
7. Referring to Ill. 4(B),why is resistor R necessary?
8. In Ill. 4(A),why is resistor R necessary?
9. Draw a schematic diagram of a circuit to reverse the polarity of the series field of a compound motor used in the automatic braking circuit when the stop button is pressed (see Ill. 3 and question 6 above).
10. Referring to Ill. 5, what keeps the time-delay coil (TD) energized after coil M is de-energized?
11. Design a shunt field circuit for Ill. 2 to include
a. a rheostat for motor speed control
b. automatic removal of the rheostat when the stop button is pushed