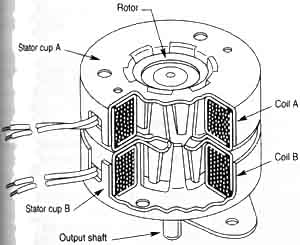
 above: Cut-away diagram of a permanent-magnet stepper motor. |
There are three basic types of stepper motors:
The first image (left) shows a cut-away diagram of a typical permanent-magnet stepper motor; its rotor is called a canstack rotor is illustrated in the next image. The canstack rotor reveals that the permanent-magnet motor can have multiple rotor winding, meaning the shaft will turn fewer degrees as each pulse of current is received at the stator. E.g., if the rotor has 60 teeth and the stator has eight poles with five teeth each (total = 40 teeth), the stepper motor is able to move 200 distinct steps to make one complete revolution. Hence, the shaft of the motor will turn 1.8° per step. The primary feature of the permanent-magnet stepper motor is that a permanent magnet is used for the rotor -- hence, no brushes are needed. A problem this type of stepper motor is that it has limited torque and may only be used for low-speed applications. |
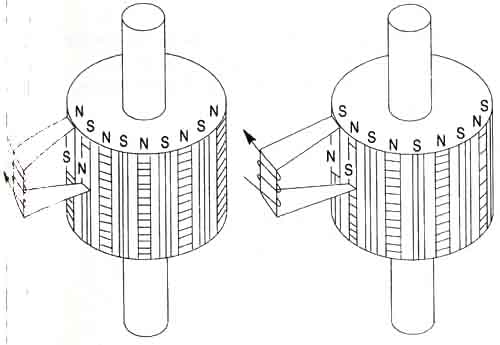
above: Canstack rotor used in permanent magnet
stepper motors.
The variable-reluctance motor doesn't utilize permanent magnets, so the field strength can be varied. The amount of torque for this type of motor is still quite low so it's normally used for small positioning tables and other small positioning loads. Because this type of motor doesn't use permanent magnets, it can't use the same type of stepper controller as other varieties of stepper motors.
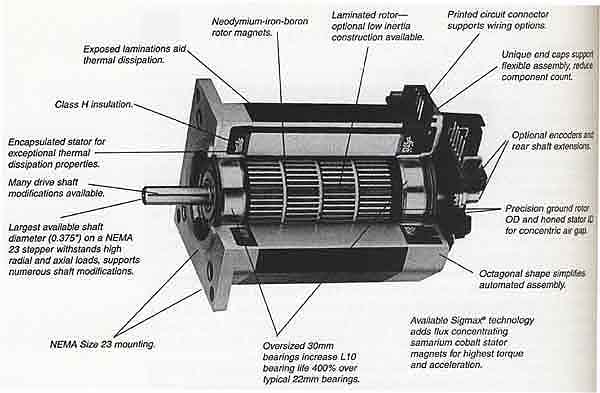
The hybrid stepper motor, shown below, is the most widely used and combines the principles of both the permanent magnet and the variable-reluctance motors. Virtually all hybrid stepper motors have two phases and operate on the principle used to previously descirbe the 12-step motor.
HOME | PREVIOUS: Introduction | NEXT: Stepper Motor: Theory of Operation