AMAZON multi-meters discounts AMAZON oscilloscope discounts
Because the motor moves from step to step, full-step and half-step motor designs are "jerky" when operating. The amount of resolution is also limited by the number of physical poles that the rotor can have. Resolution (number of steps) may be increased by tweaking the current that the controller sends to the motor during each step. The current can be tweaked so that it looks similar to a sine wave.
The image below illustrates the waveform for the current to each phase. From this diagram one can see that the current sent to each of the two sets of windings is timed so that it's always out-of-phase with each other. The fact that current to each individual phase increases and decreases like a sine wave and that it's always out of time with the other phase will permit the rotor to reach hundreds of intermediate steps. In fact it's possible for the controller to reach as many as 600 microsteps for a full-step sequence, which will provide 100,000 steps for every revolution.
The voltage sent to the motor is now a sine wave. The motor used in
this type of application is usually a permanent magnet brushless DC motor.
When the sine wave is sent to the motor at 60 Hz it will cause the motor
shaft to rotate at 72 rpm. The motor windings will require a capacitor
to be wired in series for this type of application.
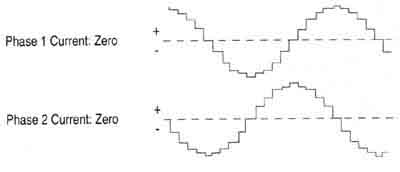
above: A phase-current diagram for a stepper motor
controller in microstep mode.
HOME | PREVIOUS: Switching Sequence for Full and Half-Step Motors | NEXT: Stepper Motor Amplifier Circuits