AMAZON multi-meters discounts AMAZON oscilloscope discounts
Overview
Fault processing approaches based on devices with distributed intelligence are described.
Two types of automatic switch coordination methodologies without communication are described, such as, FA based on recloser and voltage-delay type sectionalizers and FA based on reclosing with a fast over-current protection mode. The fast healing approach based on neighbor communication is also dealt with.
Keywords
feeder automation (FA), fault processing approaches, distributed intelligence, temporary fault, permanent fault, fault isolation, service restoration, reclosers, voltage-delay type sectionalizers, reclosing with fast over-current protection, fast healing approach based on neighbor communication
1. Introduction
This section discusses fault processing based on devices with distributed intelligence, including two types of automatic switch coordination methodologies: one without communication and one requiring a high speed, reliable communication system.
Although some of the distributed intelligence based approaches were invented decades ago, they still have application value. But with increasing scale and inter connect degree, use of distributed intelligence based devices has become more and more difficult.
This section begins with the basic principle of FA based on recloser and voltage delay type sectionalizers in Section 2. Section 3 then deals with the basic principle of FA based on reclosing with a fast over-current protection mode. Section 4 describes the fast healing approach based on neighbor communication.
2. FA based on Recloser and Voltage-Delay Type Sectionalizers
The feeder automation system with coordinated reclosers and voltage-delay type sectionalizers is typical of distribution automation systems without a master station.
It has the advantages of low costs, reliable action, and so on. This system is suitable for radial grids, "hand-in-hand" open-loop grids, and multi-sectioned and multi-linked grids. It is not suitable for more complicated grid structures. The appropriate parameter settings for reclosers and voltage-delay type sectionalizers are key for using this sys tem and if the settings are inappropriate, the scope of fault isolation will be expanded and the time taken for service restoration will be extended.
The basic principle of coordination for reclosers and voltage-delay type sectionalizers will be introduced in this section. The approach to setting the parameters for them will not be discussed in this guide.
In the coordinated feeder automation system, the two overlapping functional reclosers are used for the power switches of the feeders, the first delay time which is relatively longer (typically 15 sec.) and the second relatively shorter (typically 5 sec.). Voltage-delay type sectionalizers are used for sectional and interconnection switches (i.e., the loop switches). The voltage-delay type sectionalizer is composed of a switch (SW) body, two single phase-source (SPS) transformers, and a fault detecting relay (FDR), as shown in FIG. 1.
FIG. 1 Composition of the voltage time type sectionalizer
The voltage-delay type sectionalizer generally has two sets of functions, one set of which is aimed at the sectional switches in the normally closed state, the other set applies to the interconnection switches; that is, the loop switches in the normally open state. The two sets of functions can be interchanged through a handle.
The voltage-delay sectionalizer should be set to the first set of functions when it is used for the sectional switch. The sectionalizer should be switched off when it detects loss of voltage. The X-counter will start when one side of the sectionalizer detects volt age fed to it. The sectionalizer should be turned on when a time delay of X is reached.
The Y-counter should be started at the same time. If the sectionalizer is tripped due to loss of voltage within the period of Y time, it will be locked to be in the OFF state and will not reclose any more.
The voltage-delay type sectionalizer used as the interconnection switch should be set to the second set of functions. The XL counter should be started when the Fault Detection Relay (FDR) detects a voltage loss on any side of the interconnection switch.
The interconnection switch should be switched on when the time delay of XL is reached. The YL counter should be started at the same time. If the interconnection switch is tripped due to loss of voltage within the period of YL, it will be locked to be in the OFF state and will not reclose anymore.
When a fault occurs, the recloser used as the power switch on the fault feeder will trip and then all of the sectionalizers on the fault feeder will switch off due to loss of voltage. Then, the recloser will reclose the first time after the delay of 15 sec. The sectional switches will switch on, respectively, when the voltage fed to them and the corresponding time delays are reached.
If it is a temporary fault, all of the sectionalizers on the fault feeder will be success fully reclosed and all of the service is restored.
In case of a permanent fault, the recloser will trip the second time when the sectionalizer connecting the fault region is turned on, then all of the sectionalizers on the fault feeder will switch off again due to loss of voltage. The sectionalizer connecting with the fault region will be locked to the OFF state because it does not stay in the ON state for more than the Y-time. The other sectionalizers connecting with the fault region are also locked to their OFF state due to the residual voltage locking mechanism. The recloser on the fault feeder will reclose the second time 5 sec. later and the corresponding sectionalizers will switch on in turn, but the sectionalizer connecting the fault region remains its OFF state. Thus, the service upstream of the fault region is restored.
When the time delay of XL is reached, the interconnection switch will be turned on and the sectionalizers downstream of the fault region will switch on in turn and the service of the regions downstream of the fault is restored.
The fault processing of a typical radial distribution grid is shown in FIG. 2. A is the recloser with its two reclosing delay times of 15 sec. and 5 sec. B, C, D, and E are the voltage-delay type sectionalizers, setting at the first set of functions. The X-times of B and D are both set to 7 sec. The X-times of C and E are both set to 14 sec. The Y-times of B, C, D, and E are all set to 5 sec.
The normal situation of the radial grid is shown in FIG. 2(a). When a permanent fault occurs in region D, the recloser A trips making sectionalizers B, C , D, and E switch off (shown in FIG. 2(b)). After 15 sec., recloser A recloses the first time (shown in FIG. 2(c)). Sectionalizer B recloses 7 sec. later (shown in FIG. 2(d)). Then, 7 sec. later, sectionalizer D recloses and feeds the power to the fault region causing recloser A to be tripped again. Sectionalizer B and D trip due to loss of voltage and D is locked to the OFF state shown in FIG. 2(e). Recloser A recloses the second time 5 sec. later, sectionalizer B recloses 7 sec. later, and sectionalizer C recloses 14 sec. later. Fault processing is completed as shown in FIG. 2(f).
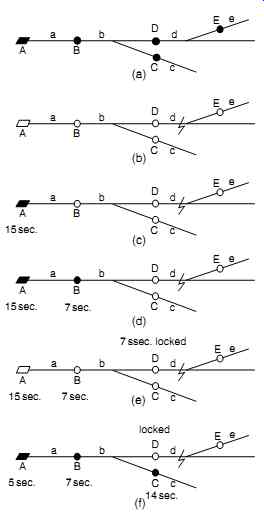
FIG. 2 The fault processing of a radial grid
The fault processing of an open-loop hand-in-hand distribution grid is shown in FIG. 3. A is the recloser with its two reclosing delay times of 15 sec. and 5 sec. B, C, D, and F are the voltage-delay type sectionalizers, set at the first set of functions with the X-time of 7 sec. E is the voltage-delay type sectionalizer set at the second set of functions with the XL-time of 45 sec. The Y- and YL-time are both 5 sec.
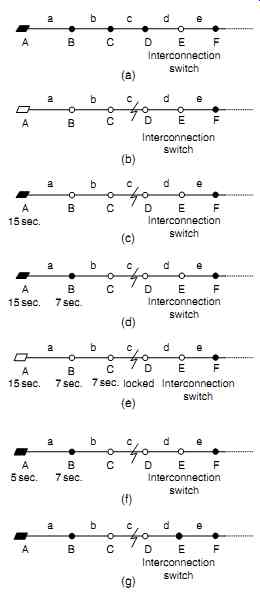
FIG. 3 The fault processing of an open-loop hand-in-hand grid
The normal situation of the open-loop hand-in-hand grid is shown in FIG. 3(a). When a permanent fault occurs in region C, the recloser A trips making sectionalizers B, C, and D switch off (shown in FIG. 3(b)). After 15 sec., recloser A recloses the first time (shown in FIG. 3(c)): 7 sec. later, sectionalizer B recloses (shown in FIG. 3(d)); 7 sec. later, sectionalizer C recloses and feeds the power to the fault region causing recloser A to be tripped again. Sectionalizer B and C trip due to loss of voltage and C is locked to the OFF state. Sectionalizer D is also locked to the OFF state due to the residual voltage locking mechanism, which is shown in FIG. 3(e). Recloser A recloses the second time 5 sec. later, 7 sec. later, sectionalizer B recloses (shown in FIG. 3(f)), and 45 sec. after the fault occurs, the interconnection switch D turns on. Fault processing is completed as shown in FIG. 3(g).
3. Reclosing with the Fast Over-Current Protection Mode
Although the feeder automation system based on recloser and voltage-delay type sectionalizers described in 3.2 has the function of automatic fault processing, the processing time is a little long and locking of the outpoints of the fault region relies on a residual voltage locking mechanism, which is not absolutely reliable. Besides, two reclosing processes are needed.
Reclosing with fast over-current protection is another fault processing technology based on distributed intelligence, in which the fault region can be isolated by only one reclose process.
The communication network, master station, and battery are not used in a feeder automation system with the mode of reclosing and fast over-current protection, thus the switch controller can be designed to be more compact and can even be installed directly into the box of the switch.
3.1 Basic Principle
The basic principles of a feeder automation system in this mode are shown in the following. The time-delay fast over-current protection (delay time of 200~300 ms) and a reclosing function (delay time of 0.5 sec.) should be arranged for the 10 kV outgoing circuit breaker in the substation.
All of the sectional switches on the feeder should be circuit breakers set to have the first set of functions, such as automatic switch off when the loss of voltage being detected, reclose after a time-delay of t I when one side is energized, instantaneous over current protection to trip when detecting the fault current during the period of t y (t y is generally 1~2 sec.) after reclosing and the corresponding switch locked in its off state, instantaneous over-current protection being turned off after t y , and switch-on prohibited when two sides of a switch in the OFF state are both energized.
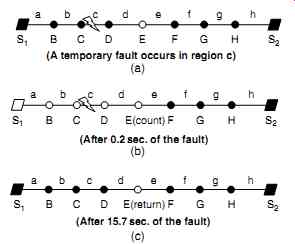
FIG. 4 The temporary fault processing for reclosing with fast over-current
protection mode
The interconnection switch (i.e., the loop switch) should be a circuit breaker set to have the second set of functions, such as switching on after the time-delay of t II in case of a voltage loss on any side of the interconnection switch is detected, instantaneous over-current protection to trip when detecting the fault current during the period of t y (t y is generally 1~2 sec.) after reclosing and the corresponding switch locked in its off state, and switch-on is prohibited and returns to its original state when two sides of a switch in the OFF state are both energized.
As for the examples shown in FIG. 4(a) and 3.4(b), S1 and S2 denote the 10 kV outgoing switch in the substation; the delay time for the over-current protection is 0.2 sec.; B, H, C, D, F, and G are the sectional switches, respectively; and E is the interconnection switch. In these two figures, the solid symbols denote the switch in its ON state, the hollow symbols denote the switch in its OFF state.
B, H, C, D, F, and G should be set to have the first set of functions, where t I is set to 5 sec. and t y is set to 2 sec. E should be set to have the second set of functions, where t II is set to a value of 20 sec. and t y is set to a value of 2 sec.
If a temporary fault occurs in region c, S1 will switch off due to over-current protection after a time-delay set beforehand. Then, B, C, and D will switch off due to the loss of voltage and the switch-on counter of E will start, as shown in FIG. 4(b). After 0.5 sec., S1 recloses successfully and delivers power to B. 5 sec. later B will switch on and deliver power to C, 5 sec. later, C will switch on and deliver power to D, 5 sec. later, D will switch on successfully, and E returns to its original state, as shown in FIG. 4(c).
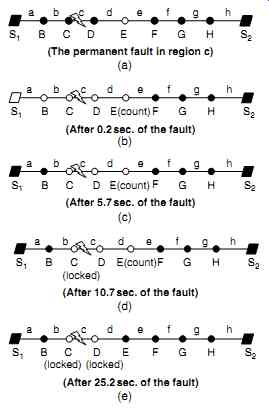
FIG. 5 The permanent fault processing for reclosing with fast over-current
protection mode

FIG. 6 The permanent fault processing for the improved reclosing with fast
over-current protection mode.
If a permanent fault occurs in region c, S1 will switch off due to over-current protection after a time-delay set beforehand. Then, B, C, and D will switch off due to the loss of voltage and the switch on counter of E will start, as shown in FIG. 5(b). After 0.5 sec., S1 will reclose successfully and deliver power to B. 5 sec. later, B will switch on and deliver power to C. The instantaneous over-current protection of B will be locked after 2 sec., as shown in FIG. 5(c). 5 sec. later, C will switch on and its instantaneous over-current protection will trip the switch and C will be locked in its OFF state, as shown in FIG. 5(d). 20.2 sec. after the fault, E reaches its delayed time. Then E will switch on and deliver power to D. 5 sec. later, D will switch on and its instantaneous over-current protection will trip the switch and D will be locked in its OFF state. But the protection of S2 will not start due to the time delay. The result of permanent fault processing is shown in FIG. 5(e).
3.2 Improvements
The basic approach of reclosing with the fast over-current protection mode has the following shortcomings:
• In permanent fault processing, after the interconnection switch is closed to restore downstream of the fault region by the other feeder, over-current protection will trip the corresponding switch once it is over-loaded.
• The duration time of temporary fault processing is still too long.
To solve this problem, the following improvements can be made.
° The recloser in the substation is improved to be allowed to reclose twice with the delay times of 0.5 sec. and 10-15 sec., respectively.
° The automatic switch off function of the sectional switch is improved to have a delay time of 1 to 1-2 sec. when loss of voltage is detected.
• As for the sectional switches and the interconnection switches, Y-time lock and YL time lock functions are added. If the two sides of a switch cannot maintain the energized state over the period of Y-time or YL-time, it should be tripped immediately and locked to be in the OFF state so it will not reclose anymore.
As for the example in FIG. 6(a), the delay times of the over-current protection of the outgoing switches of S1 and S2 are both 0.2 sec. The delay times of the twice-reclosing of S1 and S2 are 0.5 and 15 sec., respectively. All of the sectional switches of A, B, C, E, F, and G have setting values of t I of 5 sec. The t I of H is set to 10 sec. The t II of inter connection switch D is set to 45 sec. The Y-time and YL-time are all set to 3 sec. The t y of the sectional switches and the interconnection switch are set to 2 sec. The automatic switch-off delay time when there is loss of voltage is set to 1.5 sec.
In case of a temporary fault occurring in region Re(F,G), S2 is tripped due to over current protection. 0.5 sec. later, S2 is reclosed to restore the service of the whole feeder, since G, F, E, and H are still in their ON state, because the delay time of 1.5 sec. (tripping due to voltage loss) is not reached.
In case a permanent fault occurs in region Re(F,G), S2 is tripped due to over-current protection; at the same time, the t II delay time counter of interconnection switch D starts. 0.5 sec. later, S2 recloses for the first time and fails. 1.5 sec. later, G, F, E, and H switch off due to voltage loss, which is shown in FIG. 6(b). 15 sec. later, S2 recloses for the second time and delivers power to G, 5 sec. later G switches on and its instantaneous over-current protection will trip the switch and G will be locked in its OFF state (shown in FIG. 6(c)), 45.2 sec. after the fault, interconnection switch D switches on as the delay time of t II is reached and delivers power to E. 5 sec. later, E switches on and delivers power to F and H. 5 sec. later, F switches on and its instantaneous over-current protection will trip the switch so F will be locked in its OFF state but the protection of S1 will not start due to the time delay. Thus, the fault region is isolated as shown in FIG. 6(d). H switches on 5 sec. later. Supposing that the overload of S1 is caused when H switches on, S1 will be tripped by its over-current protection. H is tripped immediately due to the two sides of it not maintaining the energized state over the Y period of time, which is set to 5 sec., and it is locked in the OFF state. But A, B, C, D, and E are not tripped. S1 recloses for the first time 0.5 sec. later to restore service but without the region downstream of switch H, which is shown in FIG. 6(e).
As for the basic approach without the improvement of the Y- and YL-time locks, S1 would be reclosed and tripped repeatedly until the allowed reclosing times are used up.
As a result, the service of the whole feeder from S1 will not be restored.
4. Fast Healing Approach based on Neighbor Communication
With the development of intelligent substation technology, high-speed network communications based on GOOSE have gradually matured. The fast healing approach based on neighbor communication may achieve rapid removal of fault and does not make the non-faulty area blackout.
4.1 Basic Principle
The over-current protections are configured to the outgoing switches in the substation.
The Intelligent Electronic Devices (IED) (with functions described later in this section) are configured to the circuit breakers on the feeder. An IED of a feeder switch may send the fault information to the IEDs of its adjacent switches and identify whether the feeder switch should be tripped. Communication systems with high speed and reliability, such as, GOOSE, is used for communication among adjacent IEDs.
4.1.1 The Self-Healing Control of an Open-Loop Distribution Network
4.1.1.1 The Mechanism of Fault Location
If one phase of a switch flowing through the fault current is over the set value, its IED sends the fault information of "over-current" to the IEDs installed on the adjacent switches.
When only the enter point of a region has fault current flowing through, while none of the outpoints of the region have fault currents flowing through, the fault occurs in the region. The details of this rule are described in Section 4.
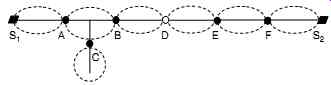
FIG. 7 A typical open-loop distribution network.
For the example shown in FIG. 7, if only the IED on A reports the fault current while the IEDs on B and C do not, the fault is in the region of Re(A, B, C). If both the IEDs on A and C report the fault current while the IED on B does not, the fault is not in the region of Re(A, B, C).
4.1.1.2 Mechanism of Fault Isolation
For an open loop distribution grid, the fault isolation mechanism is as follows:
• If a switch is one terminal of the fault region, it should be tripped.
• If none of the regions with the switch as terminal is the fault region, the switch should not be tripped even if fault current flowing through it.
Since the communication among adjacent IEDs is through the optical self-healing ring network based on GOOSE, fault information may be collected to make a decision within a short period of time, such as 15 ms. Then, the fault region is isolated by trip ping all of its terminal switches.

FIG. 8 A typical close-loop distribution network
4.1.1.3 Mechanism of Service Restoration
An interconnection switch, that is, the loop switch, usually stays in the open state with both sides energized. When a fault occurs on the feeder connected to one side of an interconnection switch, the voltage on the corresponding side of the interconnection switch drops to zero, then the service restoration program starts to automatically close the interconnection switch after a time delay set beforehand (typically 5-15 sec.). Therefore, the service of the healthy regions downstream of the fault region may be restored.
4.1.2 The Self-Healing Control of a Close-Loop Distribution Network
4.1.2.1 Mechanism of Fault Location
If one phase of a switch flowing through the fault current over the set value, its IED sends the fault information to the IEDs installed on the adjacent switches in which the direction of the fault power flow is reported.
Where at least one of the terminals of a region have fault current flowing through along the direction of the fault power flow from the outside to inside of the region, while none of the terminals of the region with fault current flowing through along the direction of the fault power flow from the inside to the outside of the region, the fault occurs in the region. The details of this rule are described in Section 4.
For the example shown in FIG. 8, if the IEDs on A and B both report the direction of fault power flow from the outside of the region Re(A, B, C) to inside of the region, the fault is in the region of Re(A, B, C). Since no fault current is flowing through C, it dose not report any fault information. But, if the IED on A reports the direction of fault power flow from the outside of the region Re(A, B, C) to inside of the region, while the IED on B reports the direction of fault power flow from the inside of the region Re(A, B, C) to outside of the region, the fault is not in the region of Re(A, B, C).
4.1.2.2 Mechanism of Fault Isolation
The mechanism of fault isolation for close-loop distribution grids is the same as that for open-loop distribution grids.

FIG. 9 Two cascade power distribution switching stations
4.1.2.3 Mechanism of Service Restoration
As for the close-loop distribution grids, once the fault region is isolated, the service to all of the healthy regions is restored, except for healthy regions on the radial branch downstream of the fault region.
As for the example shown in FIG. 9, two cascade power distribution switching stations are in the dotted boxes. S1 and S2 are the outgoing switches in the substations.
A01, A02, and B01, B02 are the input switches of the two switching stations. A0 and B0 are the bus interconnection switches. A11 -A22 and B11 -B22 are the outgoing switches of the two switching stations. All of the other switches are in the on-state.
The IEDs with the fast healing approach based on neighbor communication technology are installed in each of the switching stations, respectively.
When a fault in the region Re(B12 ,-) occurs, the IED on B12 may identify that the fault is in the region with B12 as its terminal. Thus, B12 is tripped rapidly. Although the IEDs on B0 , B02 , B01 , S2 , A02 , A0 , A01 , and S1 may also detect the fault current flowing through the corresponding switches, the IEDs identify that none of the corresponding switches is the terminal of the fault region, so they should not be tripped. Thus, over tripping can be avoided.
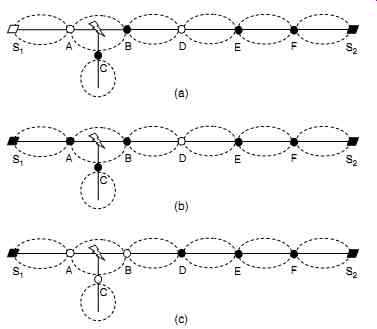
FIG. 10 Fault processing in case of some of the fault information lost.
4.2 Improvements
4.2.1 Improvements on Temporary Fault Processing
In case of a temporary fault, the basic fast-healing approach based on neighbor communication can also isolate the fault region causing unnecessary outage. To improve the performance of temporary fault processing, the following improvements are needed.
• The tripped circuit breaker with fault current is arranged to have a one-shot reclosing function when one side of it energized. If the reclosing fails causing the corresponding circuit breaker to be tripped again, it is locked in the OFF state and a message of reclosing failure is sent to its adjacent circuit breakers. If the reclosing is successful, a message of reclosing success is sent to its adjacent circuit breakers and the corresponding circuit breaker closes the function of self-healing control within 3 sec.
• Although tripped, the circuit breakers without the fault current do not have the reclosing function. Within a short period of 2 s after tripping, if it receives the message of reclosing failure or does not receive any message, it should stay in its OFF state. If it receives the message of reclosing success, it should close to its ON state.
• Un-tripped circuit breakers and successfully reclosed circuit breakers should ignore the reclosing success message.
Above improvements may also correct the mistake due to lost of fault information.
See the example shown in FIG. 10(a), assuming that a fault occurs in the region Re(A,B,C). Some distractions cause the circuit breaker A to fail to send the fault information. According to Section 4.1, the region Re(S1 ,A) is identified as the fault region causing S1 and A tripping, as shown in FIG. 10(a). S1 is reclosed successfully 0.5 sec.
later and sends the message of reclosing success to A. Thus, A is closed, as shown in FIG. 10(b). If it is a temporary fault, the reclosing of A is successful and the service to the whole feeder is restored. In case of a permanent fault, the reclosing of A fails.
The circuit breakers A, B, and C will trip to isolate the fault region of Re(A,B,C). The service of the region Re(S1 ,A) is maintained. The interconnection switch D closes to restore the service of region Re (B,D) 10 sec. after the fault, as shown in FIG. 10(c).
4.2.2 Coping with Failure to Operate Circuit breakers
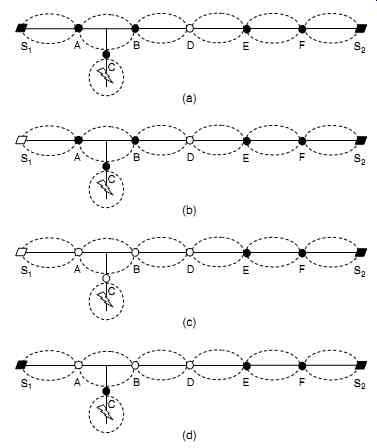
FIG. 11 Permanent fault processing in case of a circuit breaker failed to
operate.
Circuit breaker failure may destroy the fault processing of the basic fast-healing approach based on neighbor communication, to cope with this, the following improvements are needed.
• If a circuit breaker is not closed or tripped after the corresponding control message is sent to it more than 200 ms, this is regarded as failure to operate.
• If a circuit breaker fails to operate, it should send a message of fail to operate to its adjacent circuit breakers.
• If a circuit breaker is in its ON state, it should trip once it receives the message of fail to operate from its adjacent circuit breaker.
See the example shown in FIG. 11(a), assuming that a permanent fault occurs in region Re(C,-) and circuit breaker C fails to operate. The over-current protection with time delay of the outgoing circuit breaker S1 is tripped to clear the fault, as shown in FIG. 11(c). The IED on circuit breaker C sends the fail to operate message to its adjacent circuit breakers A and B. Circuit breakers A and B receive the message and trip, as shown in FIG. 11(c). S1 is reclosed successfully 0.5 sec. later to restore the service of region Re(S1,A), as shown in FIG. 11(d). The interconnection switch D closes 10 sec. after the fault to restore the service of region Re (B,D), as shown in FIG. 11(e).
It can be seen from the example in FIG. 11 that there is no more influence on fault processing other than the isolated area is a little enlarged.
5. Conclusion and Summary
The feeder automation system with the coordination of reclosers and voltage-delay type sectionalizers may complete fault processing without communication and a master station, the switches of which are all load switches with automatic functions set beforehand.
Reclosing with fast over-current protection may also complete fault processing without communication and a master station, the switches of which are all circuit breakers with automatic functions set beforehand. The fault processing speed of reclosing with fast over-current protection is usually faster than that of the feeder automation with reclosers and voltage-delay type sectionalizers The fast-healing approach based on neighbor communication may clear out the fault rapidly and avoid over-tripping. Although high speed communication among adjacent circuit breakers is needed, the fault processing program may be completed without the master station. This approach may be applied in both radial grids and looped grids to meet the requirement of the service with high reliability.