AMAZON multi-meters discounts AMAZON oscilloscope discounts
<< cont. from part 1
Squirrel-cage rotor
Since the stator polarity changes in step with the applied AC, it develops a rotating magnetic field. The rotor becomes instantaneously polarized, as the result of the induced current flow through the short-circuited copper conductors. The rotor will, therefore, tend to rotate in step with the revolving magnetic field of the stator. If some method of initially starting rotation is used, the rotor will continue to rotate. However, because of inertia, a rotor must be put into motion initially by some auxiliary method.
It should be pointed out that the speed of an AC induction motor is dependent on the speed of the rotating magnetic field and the number of stator poles that the motor has. The speed of the rotor will never be as high as the speed of the rotating stator field. If the two speeds were equal, there would be no relative motion between the rotor and stator, and, therefore, no induced rotor current and torque would develop. The rotor speed (operating speed) of an induction motor is always somewhat less than the rotating stator field developed by the applied AC voltage.
The speed of the rotating stator field may be expressed as:
f × 120
S = --- n where:
S = the speed of the rotating stator field in rpm,
f = the frequency of the applied AC voltage in hertz,
n = the number of poles in the stator windings, and
120 = a conversion constant.
A two-pole motor operating from a 60-Hz source would have a stator speed of 3600 revolutions per minute. The stator speed is also referred to as the synchronous speed of a motor. The difference between the revolving stator speed of an induction motor and the rotor speed is called slip. The rotor speed must lag behind the revolving stator speed in order to develop torque. The more the rotor speed lags behind, the more torque is developed. Slip is expressed mathematically as:
Ss - Sr × 100
% slip = ------ Ss where:
Ss = the synchronous (stator) speed in rpm, and
Sr = the rotor speed in rpm.
As the rotor speed becomes closer to the stator speed, the percentage of slip becomes smaller.
Another factor, referred to as rotor frequency, affects the operational characteristics of an induction motor under load. As the load on the shaft of the motor increases, the rotor speed tends to decrease. The stator speed, however, is unaffected. When a two-pole induction motor connected to a 60-Hz source operates at 10 percent slip, the slip will equal 360 rpm (3600 rpm × 10%). Functionally, this means that a revolving stator field sweeps across a rotor conductor 360 times per minute. Current is induced into a rotor conductor each time the stator field revolves past the conductor.
As slip is increased, more current is induced into the rotor, causing more torque to be developed. The rotor frequency depends on the amount of slip, and can be expressed as:
fr = fs × slip where:
fr = the frequency of the rotor current,
fs = the frequency of the stator current, and slip is expressed as a decimal.
Rotor frequency affects the operational characteristics of induction motors.
Single-phase AC induction motors are classified according to the method they use for starting. Some common types of single-phase AC induction motors include split-phase motors, capacitor motors, shaded-pole motors, and repulsion motors.
Split-phase Induction Motors--The split-phase AC induction motor, shown in FIG. 16 has two sets of stator windings. One set, called the run windings, is connected directly across the AC line. The other set, called the start windings, is also connected across the AC line. However, the start winding is connected in series with a centrifugal switch that is mounted on the shaft of the motor. The centrifugal switch is in the closed position when the motor is not rotating.
Before discussing the functional principle of the split-phase AC motor, we should understand how rotation is developed by an AC motor.
Refer to FIG. 17. In FIG. 17, we have a two-pole stator with single-phase AC applied. For the purposes of our discussion, a permanent magnet is placed within the stator to represent the squirrel-cage rotor of an induction motor. At time t0 of the AC sine wave, no stator field is developed. Time interval t1 will cause a stator field to be produced. Assume a north polarity on the right pole of the stator, and a south polarity on the left pole. These polarities will cause the rotor to align itself horizontally, in accordance with the laws of magnetic attraction. At time t2, the poles will become demagnetized, and then begin to magnetize in the opposite direction. At time interval t3, the stator poles will be magnetized in the opposite direction. The rotor will now align itself horizontally, as before, but in the opposite direction. This effect will continue at a rate of 120 polarity changes per second, if 60-Hz AC is applied to the stator. The rotor will not start unless it is positioned initially to be drawn toward a pole piece.
Therefore, some starting method must be used for single-phase AC motors, since they are not self-starting.
Assume that we have a two-phase situation, as shown in Figure 17B. We now have two sets of stator windings with one phase connected to each set. Two-phase voltage is, of course, not produced by power companies in the United States; however, this example will show the operational principle of a split-phase motor. As shown in the two-phase volt age-curve diagram, when one phase is at minimum value, the other is at maximum.
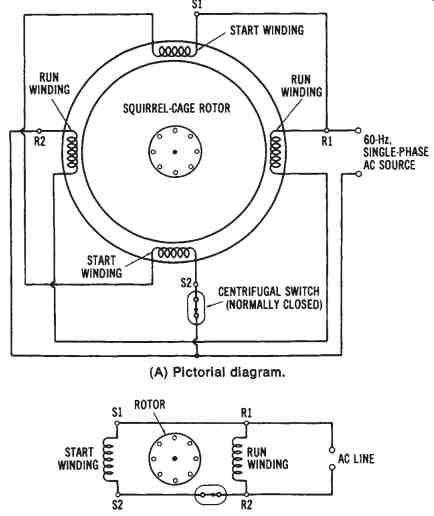
FIG. 16. The split-phase induction motor: (A) Pictorial diagram, (B)
Schematic diagram
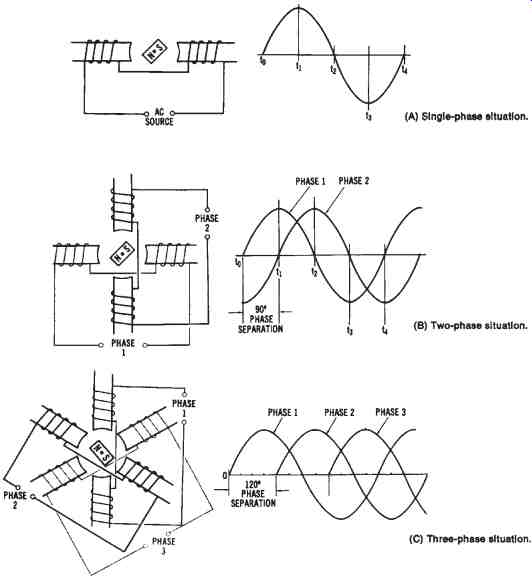
FIG. 17. Illustration of how AC motors develop rotation: (A) Single-phase
situation, (B) Two-phase situation, (C) Three-phase situation.
At time interval t1, phase 1 is maximum while phase 2 is minimum.
Assume that the right stator pole becomes a north polarity, and the left pole becomes a south polarity. The rotor will align itself horizontally, since no polarity is developed in the vertical poles at this time. Now, as we progress to time t2, phase 1 is minimum and phase 2 is maximum. Assume that the upper stator pole becomes a south polarity, and the bottom stator pole becomes a north polarity. The rotor will now align itself vertically, by moving 90°. At time t3, phase 1 becomes maximum in the opposite direction, and phase 2 is minimum. This time interval results in a north pole on the left and a south pole on the right. Thus, the rotor moves 90° further in a clockwise direction. This effect will continue as two-phase voltage is applied to the stator poles. We can see from the two-phase situation that a direction of rotation is established by the relationship of the phase 1 and the phase 2 curves, and that an AC motor with two-phase voltage applied will be self-starting.
The same is true for a three-phase situation, as illustrated in FIG. 16. Rotation of the rotor will result because of the 120° phase separation of the three-phase voltage applied to the stator poles. Three-phase induction motors are, therefore, self-starting, with no auxiliary starting method required.
Going back to the split-phase motor of FIG. 17, we can see that the purpose of the two sets of windings is to establish a simulated two phase condition, in order to start the motor. The single-phase voltage applied to this motor is said to be "split" into a two-phase current. A rotating or revolving magnetic field is created by phase splitting. The start winding of the split-phase motor is made of relatively few turns of small diameter wire, giving it a high resistance and a low inductance. The run winding is wound with many turns of large diameter wire, causing it to have a lower resistance and a higher inductance. We know that inductance in an AC circuit causes the current to lag the applied AC voltage. The more inductance present, the greater is the lag in current.
When single-phase AC is applied to the stator of a split-phase induction motor, the situation illustrated in FIG. 18 will result. Notice that the current in the start winding lags the applied voltage because of its inductance. However, the current in the run windings lags by a greater amount, because of its higher inductance. The phase separation of the cur rents in the start and run windings creates a two-phase situation. The phase displacement, however, is usually around 30° or less, which gives the motor a low starting torque, since this phase separation does not nearly approach the 90° separation of two-phase voltage. When the split-phase AC induction motor reaches about 80 percent of its normal operating speed, needed. The removal of the start winding minimizes energy losses in the machine and prevents the winding from overheating. When the motor is turned off and its speed reduced, the centrifugal switch closes, in order to connect the start winding back into the circuit.
Split-phase motors are fairly inexpensive, compared to other types of single-phase motors. They are used when low torque is required to drive mechanical loads, such as in small machinery.
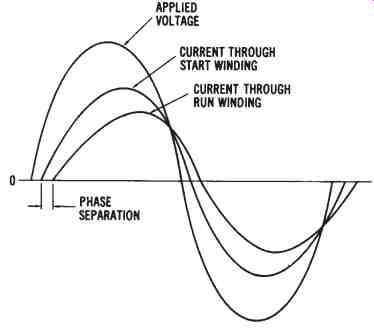
FIG. 18. Voltage/current relationships in a split-phase induction motor
Capacitor Motors--Capacitor motors are an improvement over the split-phase AC motor. Notice that, in this cutaway illustration, some of the internal features of capacitor motors are similar to split-phase induction motors. All induction motors have squirrel-cage rotors that look similar to the one shown in the illustration. You can also clearly see that capacitor motors have a centrifugal switch assembly, start windings, and run windings. Also, notice the location of the starting capacitor. The wiring diagram of a capacitor-start, single-phase induction motor is shown in Figure 14 19. Notice that, except for a capacitor placed in series with the start winding, this diagram is the same as for the split-phase motor. The purpose of the capacitor is to cause the current in the start winding to lead (rather than lag) the applied voltage. This situation is illustrated by the voltage/ current curves shown in FIG. 20. The current in the start winding now leads the applied voltage, because of the high value of capacitance in the circuit. Since the run winding is highly inductive, the current through it lags the applied voltage. Note that the amount of phase separation now approaches 90°, or an actual two-phase situation. The starting torque produced by a capacitor-start induction motor is much greater than that of a split-phase motor. Thus, this type of motor can be used for applications requiring greater initial torque. However, they are somewhat more expensive than split-phase AC motors. Most capacitor motors, as well as split phase motors, are used in fractional-horsepower sizes (less than one hp).
Another type of capacitor motor is called a capacitor-start, capacitor-run (or two-value capacitor) motor. Its circuit is shown in FIG. 21.
This motor employs two capacitors. One, of low value, is in series with the start winding and remains in the circuit during operation. The other, of higher value, is in series with the start winding and a centrifugal switch.
The larger capacitor is used only to increase starting torque, and is re moved from the circuit during normal operation by the centrifugal switch.
The smaller capacitor, and the entire start winding, are part of the operational circuit of the motor. The smaller capacitor helps to produce a more constant-running torque, as well as quieter operation and an improved power factor.
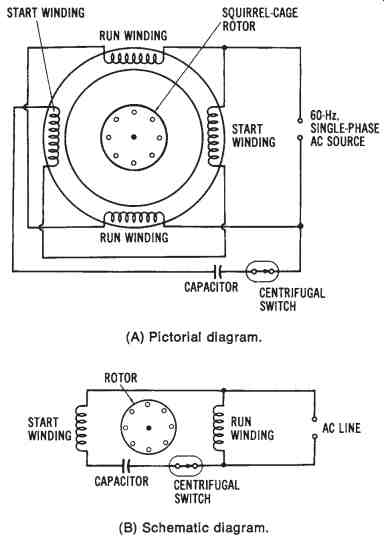
FIG. 19. The capacitor-start, single-phase induction motor: (A) Pictorial
diagram, (B) Schematic diagram.
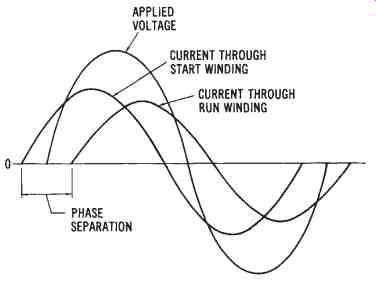
FIG. 20. Voltage/current relationships in a capacitor-start, single-phase
induction motor
Still another type of capacitor motor is one that is called a permanent capacitor motor. Its circuit is shown in FIG. 21. This motor has no centrifugal switch, so its capacitor is permanently connected into the circuit. These motors are only used for very low-torque requirements, and are made in small fractional-horsepower-size units.
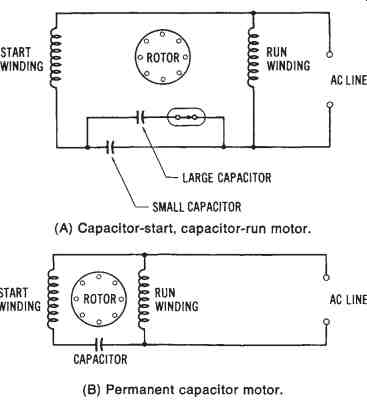
FIG. 21. Other types of capacitor motors: (A) Capacitor-start, capacitor-run
motor, (B) Permanent capacitor motor
Both split-phase motors and capacitor motors may have their direction of rotation reversed easily. Simply change the relationship of the start winding and the run winding. When either the start winding connections or the run winding connections (but not both) are reversed, the rotational direction will be reversed.
Shaded-pole Induction Motors--Another method of producing torque by a simulated two-phase method is called pole shading. These motors are used for very low-torque applications, such as fans and blower units.
They are low-cost, rugged, and reliable motors that ordinarily come in low horsepower ratings, from 1/3000 to 1/30 hp, with some exceptions.
The operational principle of a shaded-pole motor is shown in FIG. 22. The single-phase alternation shown is for discussion purposes only.
The dotted lines represent induced voltage into the shaded section of the field poles. Note the shading coils in the upper right and lower left of the two poles. The shaded pole is encircled by a heavy copper conductor and is actually a part of the main field pole. This closed-loop conductor will cause current to be induced into the shaded pole when AC is applied to the field.
When an AC voltage is applied to the stator windings, the magnetic flux in the main poles induces a voltage into the shaded sections of the poles. Since the shaded section acts like a transformer secondary, its volt age is out of phase with the main field voltage, as shown in the waveform diagram of FIG. 22. Note the four time intervals that are shown in sequence in FIG. 22. The voltage induced in the shaded pole from the main pole field causes movement of the rotor to continue. Study FIG. 22 carefully to understand the basic operating principle of the shaded pole AC induction motor more fully.
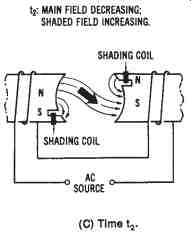
FIG. 22. Illustration of the operational principle of the shaded-pole
AC induction motor: (A) A single-phase AC alternation, (B) Time t1 (C)
Time t2, (D) Time t3, (E) Time t4
The shaded-pole motor is inexpensive, since it uses a squirrel-cage rotor and has no auxiliary starting winding or centrifugal mechanism.
Application is limited mainly to small fans and blowers, and other low torque applications.
Repulsion Motors--Another type of AC induction motor is the repulsion-start induction motor. This motor was once used for many applications, but is now being replaced by other types of single-phase motors.
The principle of operation of the repulsion motor provides an interesting contrast to other induction motors.
FIG. 23 shows the operational principle of the repulsion motor.
This motor has a wound rotor that functions similarly to a squirrel-cage rotor. It also has a commutator/brush assembly. The brushes are shorted together to produce an effect similar to the shorted conductors of a squirrel-cage rotor. The position of the brush axis determines the amount of torque developed and the direction of rotation of the repulsion motor.
In position 1, FIG. 23A, the brush axis is horizontally aligned with the stator poles. Equal and opposite currents are now induced into both halves of the rotor. Thus, no torque is developed with the brushes in this position. In position 2 ( FIG. 23B), the brushes are placed at a 90° angle to the stator field poles. The voltages induced into the rotor again counteract one another, and no torque is developed. In position 3 ( FIG. 23C), the brush axis is shifted about 60° from the stator poles. The cur rent flow in the armature now causes a magnetic field around the rotor.
The rotor field will now follow the revolving stator field in a clockwise direction. As might be expected, if we shift the brush axis in the opposite direction, as shown in position 4 ( FIG. 23D), rotation reversal will result. Thus, magnetic repulsion between the stator field and the induced rotor field causes the rotor to turn in the direction of the brush-shift.
Repulsion-start induction motors, and some similar types of modified repulsion motors, have very high starting torque. Their speed may be varied by varying the position of the brush axis. However, the mechanical problems inherent with this type of motor have caused it to be come obsolete.
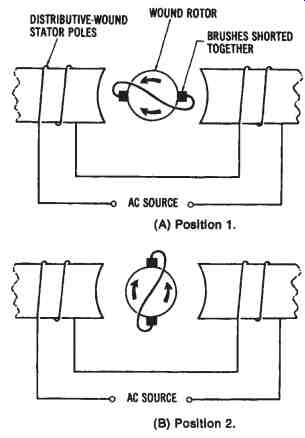
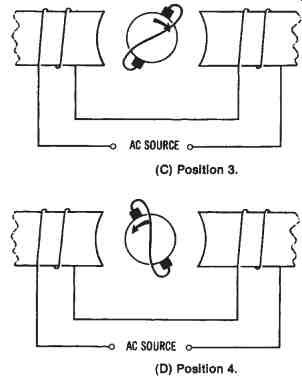
FIG. 23. Operational principle of the repulsion motor: (A) Position
1, (B) Position 2, (C) Position 3, (D) Position 4
Single-phase Synchronous Motors
It is often desirable, in timing or clock applications, to use a constant speed drive motor. Such a motor, which operates from a single-phase AC line, is called a synchronous motor. The single-phase synchronous motor has stator windings that are connected across the AC line. Its rotor is made of a permanent-magnetic material. Once the rotor is started, it will rotate in synch with the revolving stator field, since it does not rely upon the induction principle. The calculation of the speeds of synchronous motors is based on the speed formula. This formula states that:
frequency × 60
revolutions per minute =
number of pairs of poles
Therefore, for 60-Hz operation, the following synchronous speeds would be obtained:
1. Two-pole 3600 rpm.
2. Four-pole 1800 rpm.
3. Six-pole 1200 rpm.
4. Eight-pole 900 rpm.
5. Ten-pole 720 rpm.
6. Twelve-pole 600 rpm.
Small synchronous motors are used in single-phase applications for low-torque applications. Such applications include clocks, drives, and timing devices that require constant speeds.
The construction of an AC synchronous motor is quite simple. It contains no brushes, commutators, slip rings, or centrifugal-force switches.
It is simply made up of a rotor and a stator assembly. There is no direct physical contact between the rotor and stator. A carefully maintained air gap is always present between the rotor and stator. As a result of this construction, the motor has a long operating life and is highly reliable.
The speed of a synchronous motor is directly proportional to the frequency of the applied AC, and inversely proportional to the number of pairs of stator poles. Since the number of stator poles cannot be effectively altered after the motor has been manufactured, frequency is the most significant speed factor. Speeds of 28, 72, and 200 rpm are typical, with 72 rpm being a common industrial numerical control standard.
The stator layout of a two-phase synchronous motor with four poles per phase is the same as that of the DC stepping motor shown in FIG. 11. Refer now to FIG. 12. In the diagram shown, poles N1-53 and N5-57 represent one phase, while poles N2-54 and N6-58 represent the second phase. There are places for 48 teeth around the inside of the stator.
One tooth per pole has been eliminated, however, to provide a space for the windings. Five teeth per pole, or a total of 40 teeth, are formed on the stator. The four coils of each phase are connected in series to achieve the correct polarity.
The rotor of the synchronous motor is an axially magnetized permanent magnet. There are 50 teeth cast into its form. The front section of the rotor has one polarity, while the back section has the opposite polarity. The physical difference in the number of stator teeth (40) and rotor teeth (50) means that only two teeth of each part can be properly aligned simultaneously. With one section of the rotor being a north pole and the other section being a south pole, the rotor has the ability to stop very quickly. It can also produce complete direction reversals without hesitation, because of this gear-like construction.
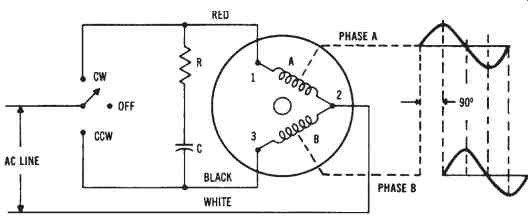 FIG. 24. Circuit diagram of a single-phase synchronous motor.
FIG. 24. Circuit diagram of a single-phase synchronous motor.
A circuit diagram of a single-phase synchronous motor is shown in FIG. 24. The resistor and capacitor of this circuit are used to pro duce a 90° phase shift in one winding. As a result, the two windings are always out of phase, regardless of whether the switch is in the clockwise (cw) or counterclockwise (ccw) position. When power is applied, the four coils of one phase produce an electromagnetic field. The rotor is attracted and aligns itself to these stator coils. Then, 90° later, the four coils of the second phase produce a corresponding field. The stator is again attracted to this position. As a result of this action, the rotor "sees" a moving force across first one phase and then the other. This force gives the rotor the needed torque that causes it to start and continue rotation when power is applied.
The synchronous motor just described has the capability of starting in one and one-half cycles of the applied line-voltage frequency. In addition to this, it can be stopped in five mechanical degrees of rotation.
These two characteristics are primarily due to the geared rotor and stator construction. Synchronous motors of this type have one other important characteristic-they draw the same amount of line current when stalled as they do when operating. This characteristic is very important in automatic machine-tool applications, where overloads occur frequently.
THREE-PHASE AC MOTORS
Three-phase AC motors are often called the "workhorses of industry." Most motors used in industry, and several types used in commercial buildings, are operated from three-phase power sources. There are three basic types of three-phase motors: (1) induction motors, (2) synchronous motors, and (3) wound-rotor induction motors (wrim).
Induction Motors
A pictorial diagram of the construction of a three-phase induction motor is given in FIG. 25. Note that the construction of this motor is very simple. It has only a distributive-wound stator, which is connected in either a wye or a delta configuration, and a squirrel-cage rotor. Since three-phase voltage is applied to the stator, phase separation is already established ( FIG. 26). No external starting mechanisms are needed.
Three-phase induction motors come in a variety of integral horsepower sizes, and have good starting and running torque characteristics.
The direction of rotation of a three-phase motor of any type can be changed very easily. If any two power lines coming into the stator windings are reversed, the direction of rotation of the shaft will change. Three phase induction motors are used for many applications, such as mechanical-energy sources for machine tools, pumps, elevators, hoists, conveyors, and other systems that use large amounts of power.
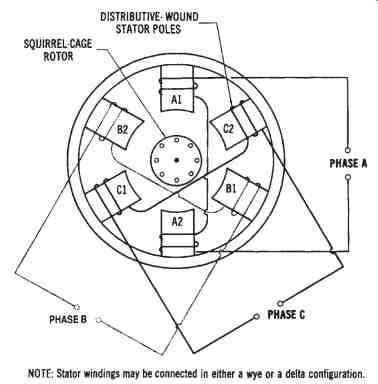
Fig. 25. Pictorial diagram of the construction of a three-phase induction
motor
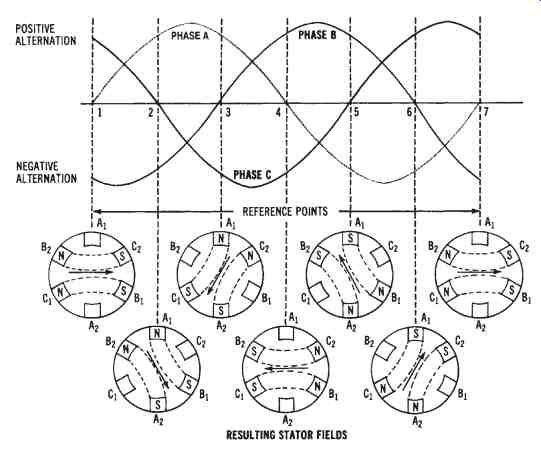
Fig. 26. Waveforms and the resulting stator fields that show the operating
principle of a three-phase induction motor.
Synchronous Motors
The three-phase synchronous motor is a unique and very specialized motor. It is considered a constant-speed motor, and it can be used to correct the power factor of three-phase systems. Synchronous motors are usually very large in size and horsepower rating.
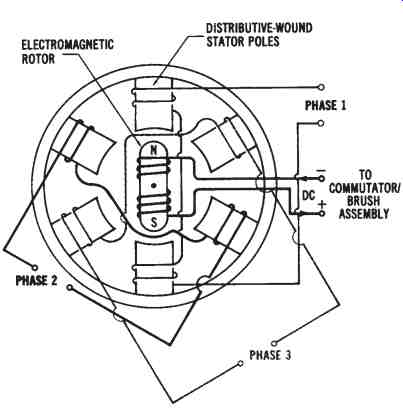
FIG. 27. Pictorial diagram of three-phase synchronous motor construction
FIG. 27 shows a pictorial diagram of the construction of a three phase synchronous motor. Physically, this motor is constructed like a three-phase alternator (see Section 6). DC is applied to the rotor to pro duce a rotating electromagnetic field; the stator windings are connected in either a wye or delta configuration. The only difference is that three-phase AC power is applied to the synchronous motor, while three-phase power is extracted from the alternator. Thus, the motor acts as an electrical load, while the alternator functions as a source of three-phase power. This relationship should be kept in mind during the following discussion.
The three-phase synchronous motor differs from the three-phase induction motor in that the rotor is wound and is connected through a slip ring/brush assembly to a DC power source. Three-phase synchronous motors, in their pure form, have no starting torque. Some external means must be used to initially start the motor. Synchronous motors are constructed so that they will rotate at the same speed as the revolving stator field. We can say that at synchronous speed, rotor speed equals stator speed, and the motor has zero slip. Thus, we can determine the speed of a synchronous motor by using the following formula:
f × 120
S = --- n/3 where:
S = the speed of a synchronous motor in r/min,
f = the frequency of the applied AC voltage in hertz,
n/3 = the number of stator poles per phase, and
120 = a conversion constant.
Note that this is the same as the formula used to determine the stator speed of a single-phase motor, except that the number of poles must be divided by three (the number of phases). A three-phase motor with twelve actual poles will have four poles per phase. Therefore, its stator speed will be 1800 rpm. Synchronous motors have operating speeds that are based on the number of stator poles they have.
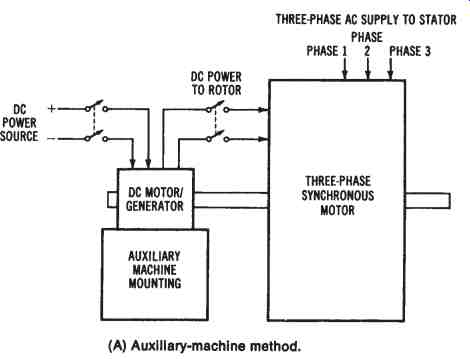
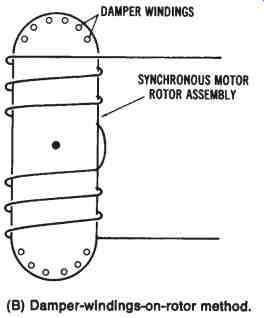
FIG. 28. Three-phase synchronous motor starting methods: (A) Auxiliary
machine starting method, (B) Damper windings placed in the rotor as
a method of starting.
Three-phase synchronous motors usually are employed in very large horse power ratings. One method of starting a large synchronous motor is to use a smaller auxiliary DC machine connected to the shaft of the synchronous motor, as illustrated in FIG. 28. The method of starting is as follows:
Step 1. DC power is applied to the auxiliary motor, causing it to increase in speed. Three-phase AC power is applied to the stator.
Step 2. When the speed of rotation reaches a value near the synchronous speed of the motor, the DC power circuit is opened and, at the same time, the terminals of the auxiliary machine are connected across the slip ring/brush assembly of the rotor.
Step 3. The auxiliary machine now converts to generator operation and supplies exciter current to the rotor of the synchronous motor, using the motor as its prime mover.
Step 4. Once the rotor is magnetized, it will "lock" in step, or synchronize, with the revolving stator field.
Step 5. The speed of rotation will remain constant under changes in load condition.
Another starting method is shown in FIG. 28. This method utilizes damper windings, which are similar to the conductors of a squirrel-cage rotor. These windings are placed within the laminated iron of the rotor assembly. No auxiliary machine is required when damper windings are used. The starting method used is as follows:
Step 1. Three-phase AC power is applied to the stator windings.
Step 2. The motor will operate as an induction motor, because of the "transformer action" of the damper windings.
Step 3. The motor speed will build up, so that the rotor speed is some what less than the speed of the revolving stator field.
Step 4. DC power from a rotating DC machine, or more commonly from a rectification system, is applied to the slip ring/brush assembly of the rotor.
Step 5. The rotor becomes magnetized and builds up speed until rotor speed is equal to stator speed.
Step 6. The speed of rotation remains constant regardless of the load placed on the shaft of the motor.
An outstanding advantage of the three-phase synchronous motor is that it can be connected to a three-phase power system to increase the overall power factor of the system. Power factor correction was discussed previously. Three-phase synchronous motors are sometimes used only to correct the system power factor. If no load is to be connected to the shaft of a three-phase synchronous motor, it is called a synchronous capacitor. It is designed to act only as a power factor corrective machine. Of course, it might be beneficial to use this motor as a constant-speed drive connected to a load, as well as for power factor correction.
We know from previous discussions that a low power factor cannot be tolerated by an electrical power system. Thus, the expense of installing three-phase synchronous machines can be justified in industrial use, as a means of appreciably increasing the system power factor. To understand how a three-phase synchronous machine operates as a power factor corrective machine, refer to the curves of FIG. 29. We know that the synchronous motor operates at a constant speed. Variation in rotor DC excitation current has no effect on speed. The excitation level will change the power factor at which the machine operates. Three operational conditions may exist, depending on the amount of DC excitation applied to the rotor.
These conditions are:
1. Normal excitation-operates at a power factor of 1.0.
2. Under excitation-operates at a lagging power factor (inductive effect).
3. Over excitation-operates at a leading power factor (capacitive effect).
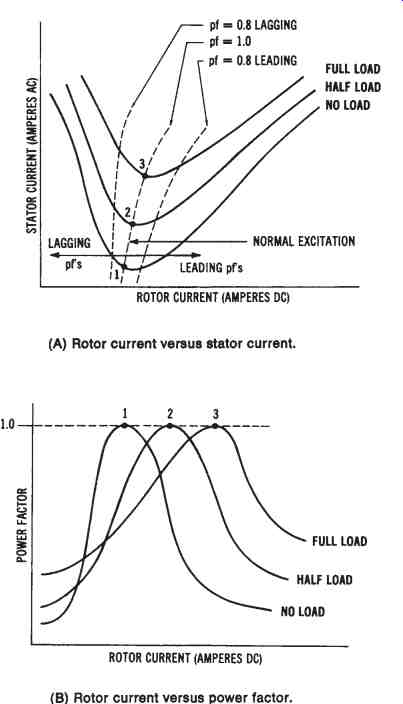
FIG. 29. Power relationships of a three phase synchronous motor: (A)
Rotor cur rent versus stator current-"V curves," (B) Rotor
current versus power factor
Note the variation of stator current drawn by the synchronous motor as the rotor current varies. You should also see that stator current is mini mum when the power factor equals 1.0, or 100%. The situations shown on the graph in FIG. 31A indicate stator and rotor currents under no load, half-load, and full-load conditions. Current values when the power factors are equal to 1.0, 0.8-leading, and 0.8-lagging conditions are also shown. These curves are sometimes referred to as V-curves for a synchronous machine. The graph in FIG. 29B shows the variation of power factor with changes in rotor current under three different load conditions.
Thus, a three-phase synchronous motor, when over-excited, can improve the overall power factor of a three-phase system.
As the load increases, the angle between the stator pole and the corresponding rotor pole on the synchronous machine increases. The stator current will also increase. However, the motor will remain synchronized unless the load causes "pull-out" to take place. The motor would then stop rotating because of the excessive torque required to rotate the load.
Most synchronous motors are rated greater than 100 horsepower and are used for many industrial applications requiring constant-speed drives.
Wound-Rotor Induction Motor
The wound-rotor induction motor (wrim), shown in FIG. 30 is a specialized type of three-phase motor. This motor may be controlled externally by placing resistances in series with its rotor circuit. The starting torque of a wrim motor can be varied by the value of external resistance.
The advantages of this type of motor are a lower starting current, a high starting torque, smooth acceleration, and ease of control. The major disadvantage of this type of motor is that it costs a great deal more than an equivalent three-phase induction motor using a squirrel-cage rotor. Thus, they are not used as extensively as other three-phase motors.
SPECIALIZED MECHANICAL POWER SYSTEMS
There is a need for specialized mechanical systems that can produce a rotary motion that is somewhat different from that produced by most electric motors. This type of system employs rotary motion to control the angular position of a shaft that is used to position the shaft of a second de vice. Synchro systems and servomechanisms are used to achieve this basic operation. With these devices, it becomes possible to transmit a rotary motion from one location to another without any direct mechanical linkage.
Synchro systems are classified as two or more motor/generator units connected together in a way that permits the transmission of angular shaft positions by means of electromagnetic field changes. When an operator turns the generator shaft of a unit to a certain position, it causes the motor shaft at a remote location to automatically rotate to an equivalent position.
With this type of system, it is possible to achieve accurate control of devices over long distances. Computers often employ these units to determine the physical changes that take place in automated operations.
In synchro systems that require increased rotational torque or precise movements of a control device, servomechanisms are employed. A servo mechanism is ordinarily a special type of AC or DC motor that drives a precision piece of equipment in specific increments. Systems that include servomechanisms generally require amplifiers and error-detecting devices to control the angular displacement of a shaft.
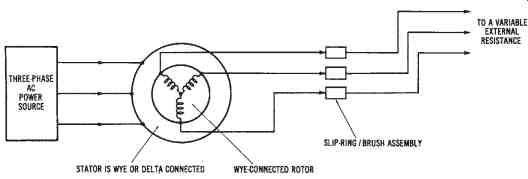
FIG. 30. Diagram of a three-phase, wound-rotor induction motor
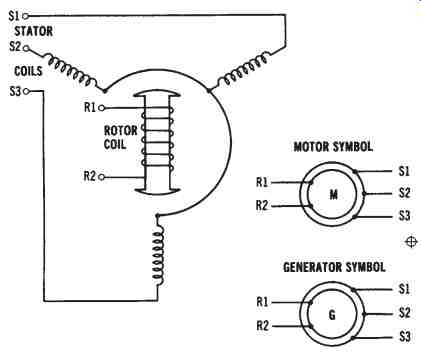
FIG. 31. Schematic diagram and symbols for a basic synchro unit
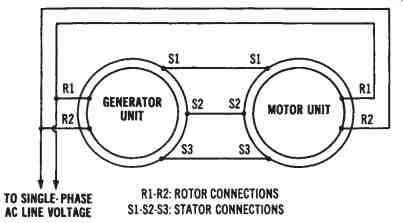
FIG. 32. Circuit diagram of a basic synchro system
Synchro System Operation
A synchro system contains two or more electromagnetic devices that are similar in appearance to small electric motors. These devices are connected together in such a way that the angular position of the generator shaft can easily be transmitted to the motor or receiver unit. FIG. 31 shows the schematic diagram of a basic synchro unit. As a general rule, the generator and motor units are identical electrically. Physically, the motor unit has a metal flywheel attached to its shaft to prevent shaft oscillations or vibrations when it is powered. The letter G or M inside of the electrical symbol denotes generator or motor functions.
FIG. 32 shows the circuit diagram of a basic synchro system.
Single-phase AC line voltage is used to power this system. Note that the line voltage is applied to the rotors of both the generator and motor. The stationary coils, or stator windings, are connected together as indicated.
When power is initially applied to the system, the motor will position it self according to the location of the generator shaft. No physical change will take place after the motor unit aligns itself with the generator position. Both units will remain in a stationary condition until some further action takes place. Turning the generator shaft a certain number of degrees in a clockwise direction will cause a corresponding change in the motor unit. If calibrated dials were attached to the shaft of each unit, they would show the same angular displacement change.
Synchro units have unique construction features. The stator coils are wound inside a cylindrical laminated metal housing. The coils are uniformly placed in slots and connected to provide three poles spaced 120° apart. These coils serve as the secondary windings of a transformer. The rotor coil of synchro units is also wound on a laminated core. This type of construction causes north and south poles of the magnetic field to extend from the laminated area of the rotor. Insulated slip rings on the shaft are used to supply AC power to the rotor. The rotor coil responds as the primary winding of a transformer.
When AC is applied to the rotor coil of the synchro unit shown in FIG. 31, it produces an alternating magnetic field. By transformer action, this field cuts across the stator coils and induces a voltage in each winding. The physical position of the rotor coil determines the amount of voltage induced in each stator coil. If the rotor coils are parallel with a stator coil, maximum voltage will be induced. The induced voltage will be of a minimum value when the rotor coils are at right angles to a stator-coil set.
The stator coils of the generator and motor of a synchro system are connected together, as indicated in the circuit diagram of FIG. 32 Voltage induced in the stator coils of the generator, therefore, causes a resulting current flow in the stator coils of the motor. This, in turn, causes a corresponding magnetic field to be established in the stator of the motor.
Line voltage applied to the rotor of the motor unit will cause it to align it self with the magnetic field of the stator coils.
Any change in rotor position of the generator unit is translated into an induced voltage and applied to the stator coils of the motor. Through this action, linear displacement changes can be effectively transmitted to the motor through three rather small stator coil wires. Systems of this type are becoming very important today in remote-control applications and in industrial automated-process control applications.
Servo System Operation
Servo systems are a specific type of rotating machine used typically for changing the mechanical position or speed of a device. Mechanical position applications include numerical-control machinery and process control-indicating equipment in industry. Speed applications are found in conveyor-belt control units, in spindle-speed control in machine-tool operations, and in disk or magnetic-tape drives for computers. As a general rule, a servo system is a rather complex unit that follows the commands of a closed-loop control path. FIG. 33 shows the components of a typical servo system.
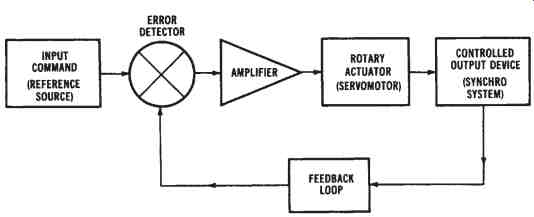
FIG. 33. Block diagram of a typical servo system
The input of a servo system serves as the reference source, or as a set point to which the load element responds. When the input is changed in some way, a command is applied to the error detector. This device receives data from both the input source and from the controlled output device. If a correction is needed, with reference to the input command, it is amplified and applied to the actuator. The actuator is normally a servomotor that produces controlled shaft displacements. The controlled output device is usually a system that relays information back to the error detector for position comparison.
A servomotor is primarily responsible for producing mechanical changes from an electromagnetic actuating device. A device of this type is normally coupled to the work load by a gear train or some mechanical linkage. Both AC and DC servomotors are used to achieve this operation. As a general rule, a servomotor is unique, when compared with other electric motors, because a servomotor is a very special type of device that is used to achieve a precise degree of rotary motion. Servomotors, for ex ample, are designed to do something other than change electrical energy into rotating mechanical energy. Motors of this type must first be able to respond accurately to signals developed by the amplifier of the system.
Second, they must be capable of reversing direction quickly when a specific signal polarity is applied. Also, the amount of torque developed by a servomotor must be quite high. As a general rule, the torque developed is a function of the voltage and current source.
Of the two distinct types of servomotors in use today, an AC type of motor, called a synchronous motor, is commonly used in low-power applications. Excessive amounts of heat developed during starting conditions normally limit this motor to rather low-output-power applications.
DC stepping motors are also used as servomotors.
ELECTRIC MOTOR APPLICATIONS
Certain factors must be considered when an electric motor is selected for a specific application. Among these considerations are (1) the source voltage and power capability available, (2) the effect of the power factor and efficiency of the motor on the overall system, (3) the effect of the starting current of the motor on the system, (4) the effect of the power system on the operation of the motor, (5) the type of mechanical load, and (6) the expected maintenance the motor will require.
Motor Performance
The major consumer of electrical power is the electric motor. It is estimated that electric motors account for 50 percent of the electrical power consumed in industrial usage, and that 35 percent of all the electrical power used is used by electrical motors. For these reasons, we must consider the efficient operation of motors to be a major part of our energy conservation efforts.
Both efficiency and the power factor must be considered in order to determine the effect of a motor, in terms of efficient power conversion.
Remember the following relationships. First,
Pout × 100
Efficiency (%) = ------ Pin where:
Pin = the power input in horsepower, and
Pout
= the power output in watts.
(To convert horsepower to watts, remember that 1 horsepower = 746 watts.) Then,
P
pf = -- VA where:
pf = the power factor of the circuit,
P = the true power in watts, and
VA = the apparent power in volt-amperes.
The maximum pf value is 1.0, or 100%, which would be obtained in a purely resistive circuit. This is referred to as unity power factor.
Effect of Load
Since electrical power will probably become more expensive and less abundant, the efficiency and power factor of electric motors will become increasingly important. The efficiency of a motor shows mathematically just how well a motor converts electrical energy into mechanical energy. A mechanical load placed on a motor affects its efficiency. Thus, it is particularly important for industrial users to load motors so that their maximum efficiency is maintained.
Power factor is also affected by the mechanical load placed on a motor. A higher power factor means that a motor requires less current to pro duce a given amount of torque or mechanical energy. Lower current levels mean that less energy is being wasted (converted to heat) in the equipment and circuits connected to the motor. Penalties are assessed on industrial users by the electrical utility companies for having low system power factors (usually less than 0.8 or 0.85 values). By operating at higher power factors, industrial users can save money on penalties, and can help, on a larger scale, with more efficient utilization of electrical power. Motor load affects the power factor to a much greater extent than it does the efficiency.
Therefore, motor applications should be carefully studied to ensure that motors (particularly very large ones) are not overloaded or underloaded, so that the available electrical power will be used more effectively.
Effect of Voltage Variations
Voltage variation also has an effect on the power factor and efficiency. Even slight changes in voltage produce a distinct effect on the power factor. However, a less distinct effect results when the voltage causes a variation in the efficiency. Because proper power utilization is becoming more and more important, motor users should make sure that their motors do not operate at undervoltage or overvoltage conditions.
Considerations for Mechanical (Motor) Loads
There are three basic types of mechanical (motor) loads connected to electrical power systems. These are DC, single-phase AC, and three phase AC systems. DC motors are ordinarily used for special applications, since they are more expensive than other types and require a DC power source. Typically, they are used for small, portable applications and powered by batteries, or for industrial/commercial applications with AC converted to DC by rectification systems. A major advantage of DC motors is their ease of speed control. The shunt-wound DC motor can be used for accurate speed control and good speed regulation. A disadvantage is the increased maintenance caused by the brushes and commutator of the machines. DC shunt-wound motors are used for variable speed drives on printing presses, rolling mills, elevators, hoists, and automated industrial machine tools.
Series-wound DC motors have a very high starting torque. Their speed regulation is not as good as that of shunt-wound DC motors. The series-wound motor also requires periodic maintenance because of the brush/commutator assembly. Typical applications of series-wound DC motors are automobile starters, traction motors for trains and electric buses, and mobile equipment operated by batteries. Compound-wound DC motors have very few applications today.
Single-phase AC motors are relatively inexpensive. Most types have good starting torque and are easily provided 120-volt and 240-volt electrical power. Disadvantages include maintenance problems due to centrifugal switches, pulsating torque, and rather noisy operation. They are used in fractional horsepower sizes (less than one horsepower) for residential, commercial, and industrial applications. Some integral horsepower sizes are available in capacitor-start types. Uses include machine cooling system blowers, and clothes dryer motors.
Specialized applications for single-phase motors include:
1. Shaded-pole motors used for portable fans, record players, dish washer pumps, and electric typewriters. They are low-cost and small, but inefficient.
2. Single-phase synchronous motors used for clocks, appliance timers, and recording instruments (compact disk players). They operate at a constant speed.
3. Universal motors (AC/DC) motors used for many types of portable tools and appliances, such as electric drills, saws, office machines, mixers, blenders, sewing machines, and vacuum cleaners. They operate at speeds up to 20,000 r/min and have easy speed control.
Remember that AC induction motors do not have speed control capability without the addition of expensive auxiliary equipment.
Three-phase AC motors of the induction type are very simple in construction, rugged, and reliable in operation. They are less expensive (per horsepower) than other motors. Applications of three-phase induction motors include industrial and commercial equipment and machine tools.
Three-phase AC synchronous motors run at constant speeds and may be used for power factor correction of electrical power systems. However, they are expensive, require maintenance of brushes/slip rings, and need a separate DC power supply.
