AMAZON multi-meters discounts AMAZON oscilloscope discounts
. The basic principle of the stepper motor is that a rotor with either permanent or momentary magnetic poles is caused to turn in response to an incrementally rotating field pattern provided by stator windings. The action is suggestive of that in an “analog” synchronous motor in which a magnetized rotor also turns in response to a rotating field supplied by stator windings. However, the rotation of the field in the stepping motor occurs in digital jumps instead of smoothly or sinusoidally, as in the synchronous motor. Interestingly, the all-around performance of the stepping motor generally improves as these jumps become more numerous and closer together. The stepping motor operates from dc pulses that are timed and conditioned by a dedicated control IC (synchronous motors are increasingly being controlled by dedicated ICs, but they are fed polyphase ac drive).
There are various ways of arranging and driving the stator windings of stepper motors, but two basic formats dominate. In the unipolar drive technique, such as that shown in FIG. 2, center-tapped or bifilar windings are used. Each pole pair ac counts for six leads being brought out. One or the other of the windings comprising a bifilar pair is energized at any time. In this way, the magnetic poles generated by the stator windings can be selectively changed. The ground symbols in the sketch of FIG. 2 indicate the interconnections of bipolar winding pairs that constitute the center taps. In practice these center taps also connect to the power-supply ground, either directly or through a current-limiting resistance. In any event, phase voltages applied to the remaining four leads are either on or off.
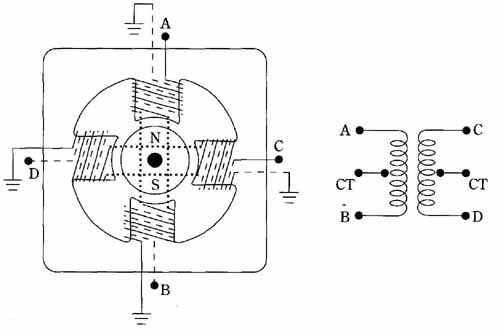 FIG. 2 Permanent-magnet stepping motor with unipolar windings. The
drive circuit operates from a fixed-polarity dc source. Stator poles
are either N or S in response to which of the bifilar windings is energized.
Single-ended drivers are generally used to turn winding currents on and
off.
FIG. 2 Permanent-magnet stepping motor with unipolar windings. The
drive circuit operates from a fixed-polarity dc source. Stator poles
are either N or S in response to which of the bifilar windings is energized.
Single-ended drivers are generally used to turn winding currents on and
off.
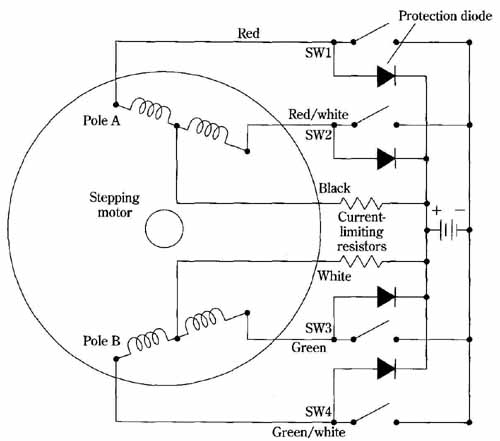 FIG. 3 Functional diagram of unipolar-winding stepping motor and drive.
The drive comprises four electronic-switches and a dc power-source. Current
direction is never reversed. Phase sequence advances via selection of
appropriate windings. Full-step and half-step rotational increments are
readily attained from the switching logic. Motorola Semiconductor Products,
Inc.
FIG. 3 Functional diagram of unipolar-winding stepping motor and drive.
The drive comprises four electronic-switches and a dc power-source. Current
direction is never reversed. Phase sequence advances via selection of
appropriate windings. Full-step and half-step rotational increments are
readily attained from the switching logic. Motorola Semiconductor Products,
Inc.
Additional insight into the operation of the unipolar-type stepping motor can be gleaned from the functional diagram of FIG. 3. The switching logic needed to obtain either full-step or half-step operation is indicated in Table 1A. The half-step mode tends to give smoother, less noisy operation with higher torque and efficiency. The reasons are not unlike those pertaining to a comparison between an eight-cylinder and a four-cylinder automotive engine. In both cases, there are more “power strokes” per revolution. Special ICs are available for dividing the stepping increments even further so that there are a great many stops per revolution. This is known as microstepping control and yields the ultimate smoothness of operation. In this way, the continuous torque characteristic of linear motors can be approached.
Table 1A. Switching logic for the simple unipolar stepping motor. Reverse rotation is brought about by reversing the phase sequence of the switching states.
Full-step sequence
Step SW1 SW2 SW3 SW4
1 OFF ON OFF ON
2 OFF ON ON OFF
3 ON OFF ON OFF
4 ON OFF OFF ON
1 OFF ON OFF ON
Half-step sequence
Step SW1 SW2 SW3 SW4
1 OFF ON OFF ON
2 OFF ON OFF OFF
3 OFF ON ON OFF
4 OFF OFF ON OFF
5 ON OFF ON OFF
6 ON OFF OFF OFF
7 ON OFF OFF ON
8 OFF OFF OFF ON
1 OFF ON OFF ON
An example of a stepping-motor system with unipolar drive is shown in FIG. 4. As previously explained, the stator windings are arranged with inner-junction or center-tap leads brought out; these are the black and white leads so designated in FIG. 4. Instead of being grounded in this application, these two leads connect to +24 V through current-limiting resistances R1 and R2. The other winding leads are connected to individual MOSFET switching stages that determine whether the current path of each winding is completed to ground.
In the circuit of FIG. 4, the deployment of the two MC14194 four-bit shift registers provides the eight unique switching conditions needed for the most demanding stepping logic, which is the half-step sequence. (Fuji-step sequence can be programmed by setting the half-step line at logic high and performing a preset).
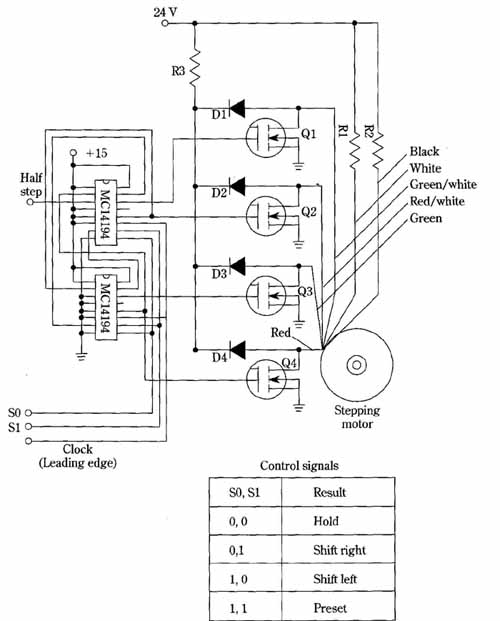
FIG. 4 Example of stepping motor drive with center-tapped windings.
This is a unipolar system. Note standard color-code of winding leads.
Either full-step or half-step operation can be obtained.
Right shifting causes one direction of rotation; left shifting reverses the direction at rotation. Diodes 1-4 protect the power MOSFETs from inductive turn-off spikes. Capacitors on the order of 0.03 uF (not shown) connected across the windings can pro vide additional protection from the switching transients.
Although resistances R1 and R2 are basically used for current limiting, they also serve another function. Because these resistances lower the L/R time constant of the motor winding circuits, they enable higher stepping rates to be attained than would be the case otherwise. Indeed, even higher stepping rates will result from in creasing the values of these resistances and simultaneously increasing the dc supply voltage. A disadvantage of this technique is that the power dissipation in these resistances lowers the overall efficiency of the drive system.
Another method for increasing torque at high stepping rates can be implemented that does not waste power as does the above method. Remember, the basic idea is to hasten the rise of current in the motor windings, inasmuch as torque is proportional to drive current. As inferred, when the stepping rate is high, there is in sufficient time for optimum current rise to take place. This is true despite the motor designer’s goal to keep winding inductance as low as possible. Raising the dc supply voltage causes a faster rise of current in the motor windings, but it’s necessary that the average current does not increase beyond safe levels. The insertion of resistance, as pointed out, wastes power. An alternate way of keeping average current at safe levels is to switch this current at a high rate. In so doing, the objective of achieving a high rate of rise will be met. Also, because of the switching technique, the average current level in the windings can be prevented from becoming unsafe. All the while, torque will be increased without incurring needless power dissipation. These benefits will be most realizable at high stepping rates (an example of current switching is shown following the discussion of bipolar-drive stepping motors).
