AMAZON multi-meters discounts AMAZON oscilloscope discounts
.The incremental control of dc motors involves digital feedback. The feedback signals contain quantitative information concerning the angular position of the motor. This type of control is probably the most sophisticated and advanced of all electronic techniques for controlling motor operation. Because of the precise behavior that can be imparted to the shaft, the incremental control of motors is intimately associated with the automation of industrial processes and, in particular, with the numerical control of machine tools from computer programs.
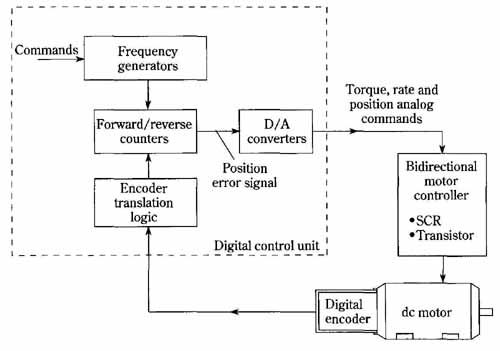
FIG. 22 Simplified block diagram of an incremental control system.
A simplified block diagram of an incremental motor control system is shown in FIG. 22. The forward/reverse counters function in a way analogous to the comparator in a linear servo system or in a regulated power supply—an error signal is generated when there is a difference between feedback information and the information provided from a reference. In this system, as in many servo and regulator systems, control is achieved by varying the reference information from an external source. Thus, a command imparted to the frequency generators provides a new “reference,” causing the incremental control system to seek a new equilibrium. In so doing, the motor shaft turns through an accumulated angular distance exactly as commanded. In another mode of operation, the motor can be commanded to rotate at a precise speed. Furthermore, the acceleration and deceleration of the motor is controllable, as is “jogging,” starting, stopping, and reversing. Such control versatility stems from the positional information carried by the feedback path.
The basic operating principle of this control system involves the subtraction of feedback pulses from accumulated command pulses in the forward/reverse counters (otherwise known as an “error register”). This subtraction produces the position error signal. As in any servo or regulator system, the error signal invokes a sequence of events causing the signal to be extinguished. In this system, the error signal is converted to a voltage level by the digital/analog converter. Then it’s boosted to a power level suitable for actuation of the motor. Motor actuation always has as its “objective” the reduction to zero of the positional error signal appearing at the output of the forward/reverse counters.
If the command consists of a pulse train with a constant pulse-repetition rate, the motor speed will be constant. Long-term accuracies on the order of several parts per million are readily achieved in this manner. On the other hand, a predetermined number of command pulses can be used to position-synchronize a motor-driven mechanism to an external source.