AMAZON multi-meters discounts AMAZON oscilloscope discounts
The motor-control circuit shown in FIG. 18 varies the duty cycle of current pulses delivered to a series motor. High starting torque and a wide speed range are available from this circuit. The design emphasis has been placed on overall operating efficiency because the intended use of the system is for battery-powered traction vehicles, such as golf carts , fork lifts, and small service vehicles. The motor receives “chopped” power from the 36-volt battery and can draw as high as 300 amperes of average current when working against a demanding load.
Although the schematic diagram shows a Darlington output stage, it’s not possible to produce currents on the order of 300 amperes from single readily available transistors. Accordingly, the output stages of the Darlington amplifier consist of paralleled MP506 germanium power transistors. Each transistor in the parallel circuit should have its individual emitter resistor in order to equalize current sharing.
The “free-wheeling” diode, D10, is important in pulsed circuits where the load is inductive, such as in a motor. This diode enables motor current to continue during the off periods of the power-output stage. This current is due to the energy stored in the magnetic field of the motor during on time. This phenomenon has nothing to do with motor or generator action but stems only from the inductive nature of a motor as a load—a simple inductor or filter choke would behave in the same manner. The continued flow of motor current after the power-output stage has switched to its off state is not contradictory and does not defeat the switching process. The average current in the motor still remains a function of the ratio of on time to off time, but it has a smoother waveform than if there were no diode in the circuit. Moreover, if the diode were not used, the inductive-kickback voltage spikes occurring at the switching transitions would possibly damage the transistors.
The portion of the circuit labeled, Pulse Modulator, consists of a multivibrator, Q5 and Q6, driven by a unijunction relaxation oscillator, Q4. This circuit generates the controllable duty-cycle pulse train which, after being amplified by stages Q7 and Q8, drives the Darlington power-output stage. Except for a current-limiting provision, there is no feedback in this control system. The duty cycle, and therefore the average current delivered to the motor, is manually controlled by potentiometer R17.
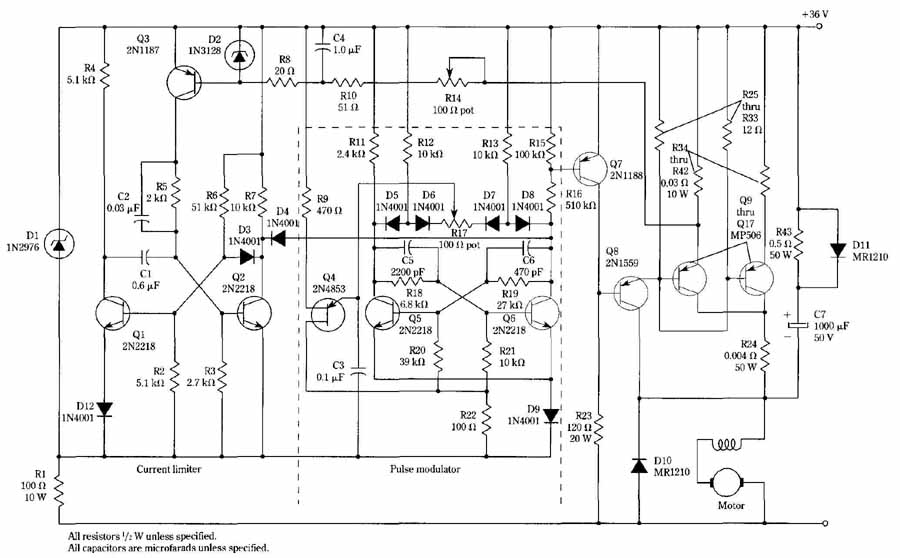
FIG. 18 Pulse-width modulated motor-control circuit. from Motorola.
Potentiometer R1 is more than a mere time-constant control for the triggering of the unijunction transistor. It can be seen from FIG. 18 that R17, in conjunction with its four steering diodes, is associated with both transistors (Q5 and Q6) of the multivibrator. This association is such that the turned-off transistor of the multivibrator always provides the charging current for the emitter capacitor, C3, of the unijunction oscillator. The result is that R1 provides adjustment of the on and off times in such a way that the pulse-repetition rate remains approximately constant.
In one complete cycle of multivibrator action first one transistor then the alternate transistor is in its off state. The frequency-determining mechanism is the charging time for C3. The total charging time for C3 is the sum of the off times in the two multivibrator transistors. This sum does not change when R17 is adjusted. For ex ample, if R17 is at one extreme of its adjustment range, capacitor C3 could take a relatively long time to charge from the multivibrator transistor that happened to be in its off state. Once charged to the triggering potential of the unijunction transistor, C3 is abruptly discharged and the resulting trigger pulse reverses the state of the multivibrator. Now C3 charges up relatively fast because the minimum resistance arm of potentiometer R17 is now involved in the charging process from the other transistors. Therefore, the duration of a cycle is not altered—only the on and off times change with adjustment of R17.
The remaining circuitry is that of the current limiter. Current limiting is necessary in the intended applications because of the willingness of a series motor to exert torque regardless of the opposition. In order to extend the battery charge and to protect both the motor and the output transistors, a means is provided for automatically extending off time when a preset maximum motor current is exceeded.
The sensing of motor current is accomplished by pnp transistor Q3 and its associated tunnel diode, D2. Ordinarily, transistor Q3 is deprived of base-emitter forward bias by the shunting action of the tunnel diode. However, the tunnel diode is triggered to a higher operating voltage if it’s subjected to current exceeding its “peak” value. This action is very fast and precise. It occurs as a manifestation of the negative-resistance characteristic of the tunnel diode. The motor current at which the tunnel diode triggers is adjustable by control R14. When the tunnel diode switches to its higher-voltage state, transistor Q3 receives sufficient base-emitter bias to draw a large collector current. This event triggers a monostable multivibrator comprising Q1 and Q2. Ordinarily (when the motor is not demanding excessive current) transistor Q1 is in its on state and transistor Q2 is off. The conduction of Q3 reverses the state of the monostable multivibrator—but only for a time determined by the RC values associated with the monostable circuit.
The temporary state reversal of the monostable multivibrator interrupts the normal operation of the previously described pulse-modulator circuit. Specifically, the pulse-modulator circuit comprising Q4, Q5, and Q6 is overridden, and transistor Q7 remains in its conductive state for the duration of the monostable multivibrator cycle.
When transistor Q7 is conducting, the power-output stage delivers no current to the motor. This action protects the motor, the output stage, and the battery from excessive current. Only the maximum current as determined by the adjustment of R14 can be consumed by the motor. When the excessive load on the motor is relaxed, the sensing circuit (Q3 and 132) reverts to its quiescent state, as does the monostable multivibrator, Q1 and Q2. There is then no interference with the normal operation of the pulse-modulator circuits involving Q4, Q5, and Q6. Therefore, motor control is again completely governed by the setting of the “throttle,” R17.
The design philosophy of this control system is worthy of study in view of the growing emphasis on electric vehicles. The use of germanium power transistors is interesting. These devices have certainly not been relegated to obsolescence by silicon devices. Germanium transistors are inexpensive, and because of their low collector emitter saturation voltage, they operate more efficiently in some high-power pulse applications that do silicon transistors. Additionally, they don’t have the commutation problems inherent in dc applications of SCRs.