AMAZON multi-meters discounts AMAZON oscilloscope discounts
OBJECTIVES
• describe the torque, speed, rotation, and speed regulation and control characteristics of a cumulative compound-wound dc motor.
• perform the preliminary test for the proper installation of a cumulative compound motor.
• connect dc compound motors.
• describe the characteristics of a differential compound-wound dc motor.
• describe the characteristics of a cumulative compound-wound dc motor.
Compound-wound motors are used whenever it's necessary to obtain a speed regulation and torque characteristic not obtainable with either a shunt or a series motor. Since many drives need a fairly high starting torque and a constant speed under load, the com pound wound motor is suitable for these applications. Some of the industrial applications include drives for passenger and freight elevators, stamping presses, rolling mills, and metal shears.
The compound motor has a normal shunt winding and a series winding on each field pole. As in the compound-wound dc generator, the series and shunt windings may be connected in long shunt, or short shunt.
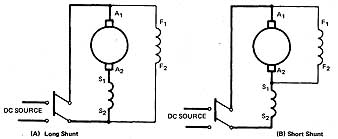
ill. 1 Motor field connections: (A) Long Shunt; (B) Short Shunt
When the series winding is connected to aid the shunt winding, the machine is a cumulative compound motor. When the series field opposes the shunt field, the machine is a differential compound motor. Using Fleming’s right-hand rule for electromagnets, it can be seen that the two windings will either reinforce each other or try to ca each other.
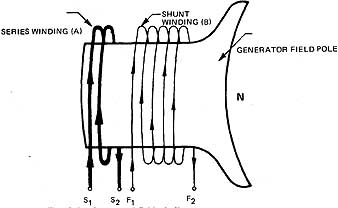
ill. 2 Compound field windings: SERIES WINDING, GENERATOR FIELD
POLE
TORQUE
The operating characteristics of a cumulative compound-wound motor are a combi nation of those of the series motor and the shunt motor. When a load is applied, the increasing current through the series winding increases the field flux. As a result, the torque for a given current is greater than it would be for a shunt motor. However, this flux increase causes the speed to decrease to a lower value than in a shunt motor. A cumulative compound-wound motor develops a high torque with any sudden increase of load. It is best suited for operating varying load machines such as punch presses.
SPEED
Unlike a series motor, the cumulative compound motor has a definite no-load speed and won't build up to destructive speeds if the load is removed.
Speed Control
The speed of a cumulative compound motor can be controlled by the use of resistors in the armature circuit to reduce the applied voltage. When the motor is to be used for installations where the rotation must be reversed frequently, such as in elevators, hoists, and railways, the controller used should have voltage dropping resistors and switching arrangements to accomplish reversal.
Electronic Speed Control
A block diagram approach to the electronic speed control of a dc motor is presented in figure 3. The ac line is rectified by a full wave bridge to supply pulsating dc to the shunt field at a steady value. The dc supplied to the armature and the series field is con trolled by an SCR (silicon controlled rectifier). By adjusting the firing time of the SCR, either more or less of the DC voltage available can be applied to the armature. If a low amount of dc voltage is applied, the torque is low and the resultant speed is low. If the SCR is fired early in the waveform and allowed to conduct for most of the cycle, then a larger amount of voltage is applied to the armature, more current results, and torque increases to spin the armature at a higher speed. Speeds below rated motor speed are produced by lowering the amount of voltage applied to the armature while keeping the shunt field steady; if higher-than-normal speed is needed, the shunt field can be weakened. Most speed controls have some type of feedback to sense the armature current, compare it to the set speed, and adjust the SCR firing angle to compensate for varying mechanical loads to keep the motor speed regulated.
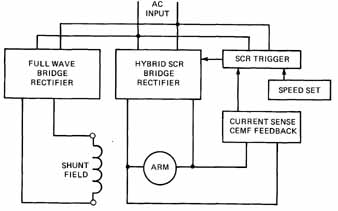
ill. 3: Block diagram of electronic speed control for dc motor: CURRENT SENSE CEMF FEEDBACK.
Speed Regulation
The speed regulation of a cumulative compound-wound motor is inferior to that of a shunt motor and superior to that of a series motor. It is a compromise between a series motor and a shunt motor.
The graph shows that the percent of speed regulation of a compound wound dc motor is lower than that of a shunt motor but higher than that of a series motor.
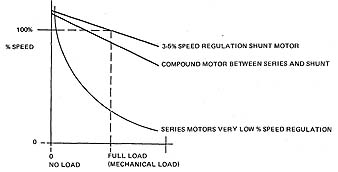
ill. 4 Graph of speed regulation of shunt, compound, and series-connected
dc motors: 5% SPEED REGULATION SHUNT MOTOR; COMPOUND MOTOR BETWEEN SERIES
AND SHUNT; SERIES MOTORS VERY LOW % SPEED REGULATION; FULL LOAD (MECHANICAL
LOAD); NO LOAD
ROTATION
The rotation of a compound-wound motor can be reversed by changing the direction of the current in the field or the armature circuit, ( 5). Since the series field coils must also be reversed if the shunt field is reversed, it's easier to reverse the current in the armature only.
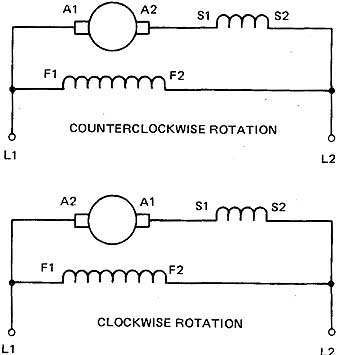
ill. 5 Standard connections for compound motors: (counter)CLOCKWISE
ROTATION
PRELIMINARY TEST FOR CUMULATIVE COMPOUNDING
When a motor is first connected, it's important to determine the continuity of the shunt field circuit. In addition, for a compound-wound motor, the proper magnetic polarity of the shunt and series field must be determined. Standardized tests determine these conditions. E.g., when the motor is connected to the controller and is ready for starting, disconnect the armature wire at the motor, close the line switch, and place the starter on the first contact point. Open the line switch slowly. If the field is intact there will be an arc at the switch. The absence of a spark indicates an open field circuit. This fault must be located and corrected before proceeding. A motor ordinarily won't start on an open field, but if it does start, it will race.
When the shunt field circuit tests complete, the motor should be started as a shunt motor. If the motor operates satisfactorily in the desired direction of rotation, disconnect the motor. If it rotates in the opposite direction, disconnect it and reverse the shunt field leads. Restart the motor. If it now rotates in the desired direction, mark the leads and disconnect power.
Next, open the shunt field circuit, connect in the series field, and operate the motor momentarily as a series machine. As soon as the armature begins to turn, note the direction of rotation and disconnect the motor power.
If the armature rotates in the desired direction, connect in the shunt field circuit and the motor is ready for operation. If the direction of rotation as a series motor is opposite to the desired direction, reverse the series field leads and then connect the shunt field circuit. The motor is now ready for operation. This makes sure the shunt field and series field help each other.
Differential Compounding
Excellent speed regulation can be obtained with a differential compound motor. When a motor is connected as a differential compound machine, the series field opposes the shunt field so that the field flux is decreased as a load is applied ( 6). As a result, the speed remains substantially constant with an increase in load. With over-compounding, a slight increase in speed is possible with an increase in load. This speed characteristic is achieved only with a loss in the rate at which torque increases with load.
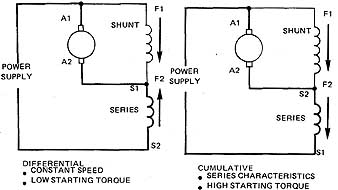
ill. 6 Magnetic polarities of compound motors:
DIFFERENTIAL:
• CONSTANT SPEED
• LOW STARTING TORQUE
CUMULATIVE:
• SERIES CHARACTERISTICS
• HIGH STARTING TORQUE
Since the field decreases with a load increase, a differential compound motor has a tendency to speed instability. When starting a differential motor, it's recommended that the series field be shorted since the great starting current in this field may overbalance the shunt field and cause the motor to start in the opposite direction.
A differential machine is connected and tested on installation, using the same procedure outlined for a cumulative compound motor. For the differential motor, however, the series windings should be connected in the opposite direction from that of the shunt winding. Don't exceed load on nameplate or reversal of direction may occur.
SUMMARY:
The dc compound motor is used where a compromise is needed between the series and the shunt motor. The compound motor has better speed characteristic than the series motor and better torque characteristics than the shunt motor. The motor can be connected so that the shunt field and the series fields are in the same direction. This is the cumulative connection. You should perform a test to be sure the motor is connected as intended. The cumulative connection reacts quite differently than the differential connection. Many dc motors are now driven by electronic drives. The same basic concepts are used to control speed and direction.
QUIZ:
1. Circle the letter for each of the following statements which applies to a cumulative compound-wound dc motor.
a. The speed regulation of a cumulative compound-wound dc motor is better than that of a shunt motor.
b. The speed of a cumulative motor has a no-load limit.
c. The speed of the motor decreases more for a given increase in load than does a differential motor.
d. A cumulative motor has less torque than a shunt motor of the same hp rating for a given increase in armature current.
e. The speed regulation of a cumulative motor is better than that of a series motor.
f. A cumulative motor develops a high torque with a sudden increase of load.
g. To reverse the direction of rotation, the current in either the armature or the shunt field must be reversed.
h. A cumulative motor is connected so that the series flux aids the shunt winding flux.
i. When installing a cumulative compound-wound motor, the direction of rotation should be the same when testing the motor for operation either as a series motor or a shunt motor.
2. Circle the letter for each of the following statements which applies to a differential compound-wound dc motor.
a. A differential motor is used in applications where an essentially constant speed at various loads is required.
b. The starting torque for a differential motor is higher than that of a cumulative motor.
c. The motor may reverse its direction of rotation if started under a heavy load.
d. This motor develops a speed instability since the flux field decreases with a load increase.
e. When starting a differential motor, the shunt field should be shorted because of the great starting current.
3. Arrange the following steps numerically in the correct sequence to test for the proper connections to operate a cumulative compound-wound motor. Place the step number in the space provided, starting with number 1.
____a. Place starter on first contact point to test field.
____b. With motor shut down, open shunt field circuit.
____c. If rotation is in direction opposite to that desired, reverse the series field leads.
____d. Disconnect armature wire at motor and close line switch.
____e. An absence of spark indicates an open field circuit which must be located and corrected before proceeding with the test.
____f. If rotation is in direction opposite to that desired, shut down motor, reverse shunt field leads, and restart motor; rotation should be in desired direction.
____g. Slowly open line switch and observe for arc at switch indicating field is intact.
____h. Start motor as a shunt motor and observe rotation.
____i. Connect in series field, start motor and immediately shut it down while noting direction of rotation.
____j. Connect the shunt field circuit; the motor is now ready for operation.