AMAZON multi-meters discounts AMAZON oscilloscope discounts
OBJECTIVES
• draw the basic connection circuit of a series dc motor.
• describe the effects on the torque and speed of a change in current.
• describe the effects of a reduction of a load on the speed of a dc series motor.
• connect a dc series motor.
Despite the wide use of alternating current for power generation and transmission, the dc series motor is often used as a starter motor in automobiles and aircraft. This type of motor is also used as a traction motor because of its ability to produce a high torque with only a moderate increase in power at reduced speed.
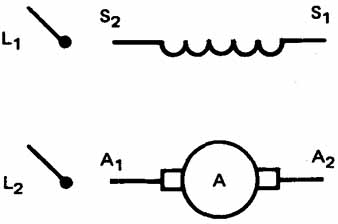
The basic circuit for the series motor is illustrated in 1. The field circuit has comparatively few turns of wire of a size that will permit it to carry the full-load current of the motor.
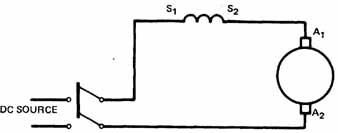
ill. 1 Series motor connections
TORQUE
A series motor develops up to 500 percent of its full load torque at starting. There fore, this type of motor is used for railway installations, cranes, and other applications for which the starting load is heavy. The series motor is used in electric locomotives and are used for the drive wheels.
It should be remembered that the shunt motor operates at constant speed. In a shunt motor, any increase in torque requires a proportionate increase in armature current. In a series motor, the field is operated below saturation and any increase in load causes an increase of current in both the field and armature circuits. As a result, the armature flux and the field flux increase together. Since torque depends on the interaction of the armature and field fluxes, the torque increases as the square of the value of the current increases. Therefore, a series motor produces a greater torque than a shunt motor for the same increase in current. The series motor, however, shows a greater reduction in speed as mechanical load is added. A light load has little current draw and the armature and field current are reduced.
SPEED CONTROL AND SPEED REGULATION
The speed regulation of a series motor is inherently poorer than that of a shunt motor. If the mechanical load is reduced, a simultaneous reduction of current occurs in both the field and the armature. The reduction in the field current reduces the counter emf and the motor speeds up trying to rebuild the counter emf resulting from the reduced field flux. As a result, there is a greater increase in speed than would occur in a shunt motor for the same load change. If the mechanical load is removed entirely, the speed increases without limit and destruction of the armature through centrifugal force is certain to occur. For this reason, series motors are always permanently connected to their load.
If the maximum branch-circuit fuse size for any dc motor is limited to 150 percent of the full-load running current of the motor, the starters used with such motors must limit the starting current to 150 percent of the full-load current rating. Such starters must be equipped with an automatic, no-load release to prevent the armature from reaching dangerous speeds. The no-load release is set to open the circuit at the armature current corresponding to the maximum speed rating.
The speed of a series motor is controlled by varying the applied voltage. A series motor controller usually is designed to start, stop, reverse, and regulate the speed.
ROTATION
The direction of rotation may be reversed by changing the direction of the current either in the series field or the armature ( 2).
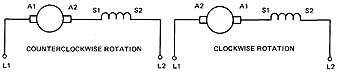
ill. 2 Standard connections for series motors:
COUNTERCLOCKWISE ROTATION, CLOCKWISE ROTATION
MOTOR RATINGS
Series dc motors are rated for voltage, current, horse power, and maximum speed.
SUMMARY
The dc series motor has very high starting torque at very low speed. This characteristic makes it ideal for traction motors. These motors are used in fork lifts or diesel electric locomotives. The relative speed of the motor is controlled by adjusting the applied volt age to the series field and the armature. The motor can be reversed by either changing the direction of current in the series field or the armature.
QUIZ
Select the correct answer for each of the following statements.
1. The torque of a series motor
a. is lower in its starting value than the starting torque for a shunt motor of the same horsepower rating.
b. depends on the flux of the armature only.
c. increases directly as the square of the current increase.
d. increases with a load increase, but causes less of a reduction in speed than a shunt motor for the same current increase.
2. For a series motor,
a. the field is operated below saturation.
b. an increase in both the armature current and the field current occurs because of an increase in load.
c. the reduction in speed due to an increase in load is greater than in the shunt motor.
d. all of these.
3. Since a dc series motor has poor speed regulation,
a. a reduction in load causes an increase of current in both the field and armature.
b. the removal of the mechanical load will cause the speed to increase without limit resulting in the destruction of the armature.
c. it shouldn't be connected permanently to its load.
d. it does not require speed control.
4. The speed control for a dc series motor:
a. is accomplished using a diverter rheostat across the series field.
b. has an automatic no-field release feature included on all starters regardless of the limitations on the starting current.
c. varies with the applied voltage.
d. all of these.
5. A series motor controller usually is designed for:
a. cranes.
b. railway propulsion.
c. starting loads when heavy.
d. all of these.
6. Complete the electrical connections for the series motor.