AMAZON multi-meters discounts AMAZON oscilloscope discounts
OBJECTIVES
• list the basic parts in the construction of a synchronous motor.
• define and describe an amortisseur winding.
• describe the basic operation of a synchronous motor.
• describe how the power factor of a synchronous motor is affected by an underexcited dc field, a normally excited dc field, and an overexcited dc field.
• list at least three industrial applications of the synchronous motor.
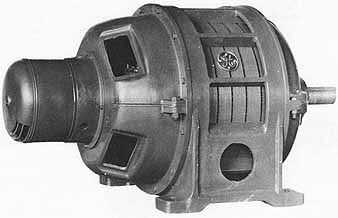
ill. 1 Synchronous motor with direct-connected exciter (General Electric Company)
The synchronous motor, fgr 1, is a three-phase ac motor which operates at a constant speed from a no-load condition to full load. This type of motor has a revolving field which is separately excited from a direct-current source. In this respect, it's similar to a three-phase ac generator. If the de field excitation is changed, the power factor of a synchronous motor can be varied over a wide range of lagging and leading values.
The synchronous motor is used in many industrial applications because of its fixed speed characteristic over the range from no load to full load. This type of motor also is used to correct or improve the power factor of three-phase ac industrial circuits, thereby reducing operating costs.
CONSTRUCTION DETAILS
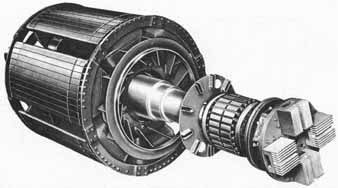
A three-phase synchronous motor basically consists of a stator core with a three-phase winding (similar to an induction motor) a revolving dc field with an auxiliary or amortisseur winding and slip rings, brushes and brush holders, and two end shields housing the bearings that support the rotor shaft. An amortisseur winding (fgr 2) consists of copper bars embedded in the cores of the poles. The copper bars of this special type of “squirrel-cage winding” are welded to end rings on each side of the rotor.
Both the stator winding and the core of a synchronous motor are similar to those of the three-phase, squirrel-cage induction motor and the wound-rotor induction motor. The leads for the stator winding are marked T1, T2 and T3 and terminate in an outlet box mounted on the side of the motor frame.
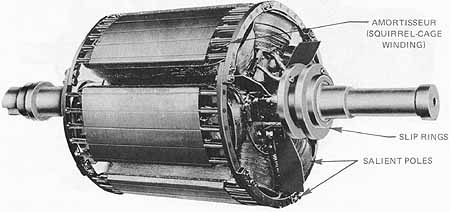
ill. 2 A synchronous motor rotor with amortisseur winding
The rotor of the synchronous motor has salient field poles. The field coils are connected in series for alternate polarity. The number of rotor field poles must equal the number of stator field poles. The field circuit leads are brought out to two slip rings mounted on the rotor shaft for brush-type motors. Carbon brushes mounted in brush holders make contact with the two slip rings. The terminals of the field circuit are brought out from the brush holders to a second terminal box mounted on the frame of the motor. The leads for the field circuit are marked F and F A squirrel-cage, or amortisseur, winding is pro vided for starting because the synchronous motor isn't self-starting without this feature. The rotor illustrated in 2 has salient poles and an amortisseur winding.
Two end shields are provided on a synchronous motor. One of the end shields is larger than the second shield because it houses the dc brush holder assembly and slip rings. Either sleeve bearings or ball-bearing units are used to support the rotor shaft. The bearings also are housed in the end shields of the motor.
PRINCIPLE OF OPERATION
When the rated three-phase voltage is applied to the stator windings, a rotating magnetic field is developed. This field travels at the synchronous speed. As stated in previous units, the synchronous speed of the magnetic field depends on the frequency of the three-phase voltage and the number of stator poles. The following formula is used to determine the synchronous speed.
Synchronous speed = (120 x frequency) / number of poles
S = (120xf) / p
The magnetic field which is developed by the stator windings travels at synchronous speed and cuts across the squirrel-cage winding of the rotor. Both voltage and current are induced in the bars of the rotor winding. The resulting magnetic field of the amortisseur (squirrel-cage) winding reacts with the stator field to create a torque which causes the rotor to turn.
The rotation of the rotor will increase in speed to a point slightly below the synchro nous speed of the stator, about 92 percent to 97 percent of the motor rated speed. There is a small slip in the speed of the rotor behind the speed of the magnetic field set up by the stator. In other words, the motor is started as a squirrel-cage induction motor.
The field circuit's now connected to a source of direct current and fixed magnetic poles are set up in the rotor field cores. The magnetic poles of the rotor are attracted to unlike magnetic poles of the magnetic field set up by the stator.
ills 20-3 and 20-4 show how the rotor field poles lock with unlike poles of the stator field. Once the field poles are locked, the rotor speed becomes the same as the speed of the magnetic field set up by the stator windings. In other words, the speed of the rotor is now equal to the synchronous speed.
Remember that a synchronous motor must always be started as a three-phase, squirrel-cage induction motor with the dc field excitation disconnected. The dc field circuit's added only after the rotor accelerates to a value near the synchronous speed. The motor then will operate as a synchronous motor, locked in step with the stator rotating field.
If an attempt is made to start a three-phase synchronous motor by first energizing the dc field circuit and then applying the three-phase voltage to the stator windings, the motor won't start since the net torque is zero, At the instant the three-phase voltage is applied to the stator windings, the magnetic field set up by the stator current turns at the synchro nous speed. The rotor, with its magnetic poles of fixed polarity, is attracted first by an unlike stator pole and attempts to turn in that direction. However, before the rotor can turn, another stator pole of opposite polarity moves into position and the rotor then attempts to turn in the opposite direction. Because of this action of the alternating poles, the net torque is zero and the motor does not start.
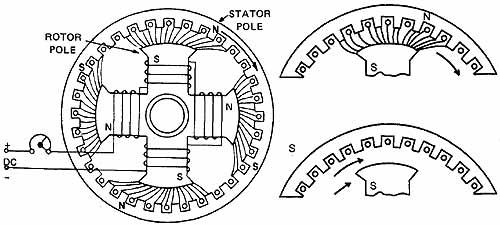
ill. 3 Diagram to show the principle of operation on a synchronous
motor; ill. 4 Starting of synchronous motors (REPULSION BETWEEN UNLIKE
POLES)
Direct-Current Field Excitation
In the early models, the field circuit's excited from an external direct-current source. A dc generator may be coupled to the motor shaft to supply the dc excitation current.
ill 5 shows the connections for a synchronous motor. A field rheostat in the separately excited field circuit varies the current in the field circuit. Changes in the field current affect the strength of the magnetic field developed by the revolving rotor. Variations in the rotor field strength don't affect the motor which continues to operate at a constant speed. However, changes in the dc field excitation do change the power factor of a synchronous motor.
Brushless Solid-State Excitation
An improvement in synchronous motor excitation is the development of the brushless dc exciter. The commutator of a conventional direct-connected exciter is replaced with a three-phase, bridge-type, solid-state rectifier. The dc output is then fed directly to the motor field winding. Simplified circuitry is illustrated in 6. A stationary field ring for the ac exciter receives dc from a small rectifier in the motor control cabinet. This rectifier is powered from the ac source. The exciter dc field is also adjustable. Rectifier solid-state diodes change the exciter ac output to dc. This dc is the source of excitation for the rotor field poles. Silicon-controlled rectifiers, activated by the solid-state field control circuit, replace electromechanical relays and the contactors of the conventional brush-type synchronous motor.
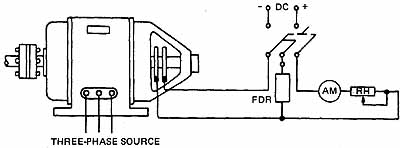
ill. 5 External connections for a synchronous motor
The field discharge resistor is inserted during motor starting. At motor synchronizing pull-in speed, the field discharge circuit's automatically opened and dc excitation is applied to the rotor field pole windings. Excitation is automatically removed if the motor pulls out of step (synchronization) due to an overload or a voltage failure. The brushless rotor is illustrated in 7. Mounted on the rotor shaft are the armature of the ac exciter, the ac output of which is rectified to dc by the silicon diodes. Brush and commutator problems are eliminated with this system. (The stator of a brushless motor is similar to that of a brush-type motor.)
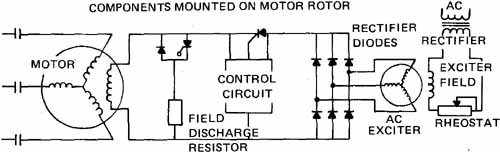
ill. 6 Simplified circuit for a brushless synchronous motor:
COMPONENTS MOUNTED ON MOTOR ROTOR
ill. 7 Rotor of a brushless synchronous motor.
Power Factor
A poor lagging power factor results when the field current is decreased below normal by inserting all of the resistance of the rheostat in the field circuit. The three-phase ac circuit to the stator supplies some magnetizing current which helps strengthen the weak dc field. This magnetizing component of current lags the voltage by 90 electrical degrees. Since the magnetizing component of current becomes a large part of the total current input, a low lagging power factor results.
If a weak dc field is strengthened, the power factor improves. As a result, the three-phase ac circuit to the stator supplies less magnetizing current. The magnetizing component of current becomes a smaller part of the total current input to the stator winding, and the power factor increases. If the field strength is increased sufficiently, the power factor increases to unity or 100 percent. When a power factor value of unity is reached, the three-phase ac circuit does not supply any current and the dc field circuit sup plies all of the current necessary to maintain a strong rotor field. The value of dc field excitation required to achieve unity power factor is called normal-field excitation.
If the magnetic field of the rotor is strengthened further by increasing the dc field current above the normal field excitation value, the power factor decreases. However, the power factor is leading when the dc field is overexcited, The three-phase ac circuit feeding the stator winding delivers a demagnetizing component of current which opposes the too strong rotor field. This action results in a weakening of the rotor field to its normal magnetic strength.
The diagrams in fgr 8 show how the dc field is aided or opposed by the magnetic field set up by the ac windings. It is assumed in fgr 8 that the dc field is stationary and a revolving armature is connected to the ac source. Keep in mind the fact that most synchronous motors have stationary ac windings and a revolving dc field. For either case, however, the principle of operation is the same.
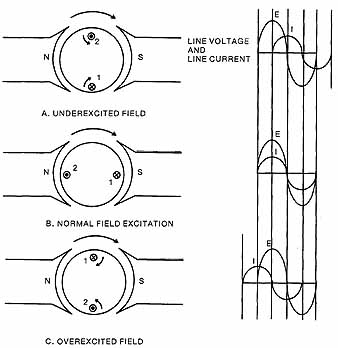
ill. 8 Field excitation in a synchronous motor.
ill 9 shows two characteristic operating curves for a three-phase synchro nous motor. With normal full field excitation, the power factor has a peak value of unity or 100 percent and the ac stator current is at its lowest value. As the dc field current is decreased in value, the power factor decreases in the lag quadrant and there is a resulting rapid rise in the ac stator current. If the dc field current is increased above the normal field excitation value, the power factor decreases in the lead quadrant and a rapid rise in the ac stator current results.
It has been shown that a synchronous motor operated with an overexcited dc field has a leading power factor. For this reason, a three-phase synchronous motor often is connected to a three-phase industrial feeder circuit having a low lagging power factor. In other words, the synchronous motor with an overexcited dc field will correct the power factor of the industrial feeder circuit.
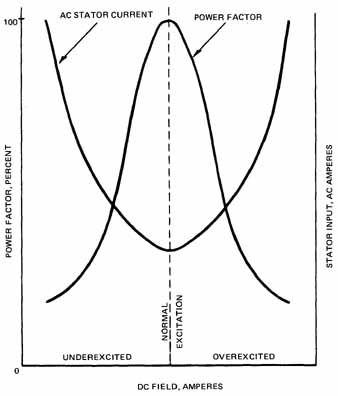
ill. 9 Characteristic operating curves for synchronous motors
In fgr 10 two induction motors with lagging power factors are connected to an industrial feeder circuit. The synchronous motor connected to the same feeder is operated with an overexcited dc field. Since the synchronous motor can be adjusted so that the resulting power factor is leading, the power factor of the industrial feeder can be corrected until it reaches a value near unity or 100 percent.
Reversing Rotation
The direction of rotation of a synchronous motor is reversed by interchanging any two of the three line leads feeding the stator winding. The direction of rotation of the motor does not change if the two conductors of the dc source are interchanged.
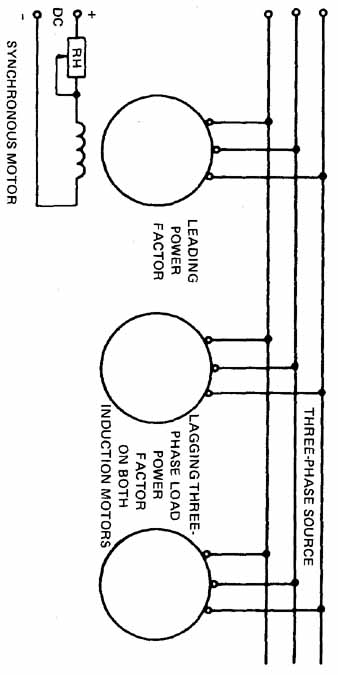
ill. 10 Synchronous motor used to correct power factor.
INDUSTRIAL APPLICATIONS
The three-phase synchronous motor is used when a prime mover having a constant speed from a no-load condition to full load is required, such as fans, air compressors, and pumps. The synchronous motor is used in some industrial applications to drive a mechanical load and also correct power factor. In some applications, this type of motor is used only to correct the power factor of an industrial power system. When the synchronous motor is used only to correct power factor and does not drive any mechanical load, it serves the same purpose as a bank of capacitors used for power factor correction. There fore, in such an installation the motor is called asynchronous capacitor.
Three-phase synchronous motors, up to a rating of 10 horsepower, usually are started directly across the rated three-phase voltage. Synchronous motors of larger sizes are started through a starting compensator or an automatic starter. In this type of starting, the voltage applied to the motor terminals at the instant of start is about half the value of the rated line voltage and the starting surge of current is limited.
SUMMARY
The ac synchronous motor is used where the speed must be kept constant. As the name implies, the motor will run at the designed synchronous speed. The principle used in the larger three-phase synchronous motors is to provide a dc field for the rotor. The methods may vary in the application of the dc. Some motors use an external dc source and feed the dc to the rotor via slip rings. Other motors will control a magnetic field to the rotor and use solid state rectifiers to create dc in the rotor. In either case, the rotor field can change the power factor of the synchronous motor and allow it to act as a source of leading-power factor, thereby correcting the normal lagging-power factor of an industrial power system.
REVIEW QUIZ:
A. Completely answer the following questions.
1. List the basic parts of a three-phase synchronous motor. _____
2. What is an amortisseur winding?
3. Explain the proper procedure to use in starting a synchronous motor. _______
4. A three-phase synchronous motor with six stator poles and six rotor poles is operated from a three-phase, 60-hertz line of the correct voltage rating. Determine the speed of the motor.
5. How is a leading power factor obtained with a three-phase synchronous motor?
6. What is the purpose of a rheostat in the separately excited dc field circuit of a synchronous motor? ____
7. How is the direction of rotation of a three-phase synchronous motor reversed?
8. State two important applications for three-phase synchronous motors.
9. What is a synchronous capacitor?
B. Select the correct answer for each of the following statements and place the corresponding letter in the space provided.
10. A synchronous motor must be started
a. with full dc in the field circuit.
b. with weak dc in the field circuit.
c. as an induction motor.
d. when the power factor is low.
11. The speed of a synchronous motor
a. is constant from no load to full load.
b. drops from no load to full load.
c. increases from no load to full load.
d. is variable from no load to full load.
12. A synchronous motor with an under-excited dc field has:
a. a leading power factor.
b. a lagging power factor.
c. less synchronous speed.
d. no effect.
13. The power factor of a synchronous motor can be varied by changing the:
a. brush polarity.
b. phase rotation.
c. speed of rotation.
d. Field excitation.
14. A synchronous motor running on the three-phase line voltage serves the same function of power factor correction as _______
a. bank of resistors.
b. a bank of capacitors.
c. an induction motor.
d. a wound-rotor motor.