AMAZON multi-meters discounts AMAZON oscilloscope discounts
OBJECTIVES
• describe the construction of a three-phase, squirrel-cage motor, listing the main components of this type of motor.
• identify the following items and explain their importance to the operation of a three-phase, squirrel-cage induction motor: rotating stator field, synchronous speed, rotor induced voltages, speed regulation, percent slip, torque, starting current, no-load power factor, full-load power factor, reverse rotation, and speed control.
• calculate motor speed and percent slip.
• reverse a squirrel cage motor.
• describe why a motor draws more current when loaded.
• draw diagrams showing the dual voltage connections for 230/460-volt motor operation.
• explain motor nameplate information.
OPERATING CHARACTERISTICS
The three-phase, squirrel-cage induction motor is relatively small in physical size for a given horsepower rating when compared with other types of motors. The squirrel- cage induction motor has very good speed regulation under varying load conditions. Because of its rugged construction and reliable operation, the three-phase, squirrel-cage induction motor is widely used for many industrial applications (ill 1).
CONSTRUCTION DETAILS
The three-phase, squirrel-cage induction motor normally consists of a stator, a rotor, and two end shields housing the bearings that support the rotor shaft.
A minimum of maintenance is required with this type of motor because
• the rotor windings are shorted to form a squirrel cage.
• there are no commutator or slip rings to service (compared to the dc motor).
• there are no brushes to replace.
The motor frame is usually made of cast steel. The stator core is pressed directly into the frame. The two end shields housing the bearings are bolted to the cast steel frame. The bearings which support the rotor shaft are either sleeve bearings or ball bearings. ill 2 is a cutaway view of an assembled motor. ill 3 illustrates the main parts of a three-phase, squirrel-cage induction motor.
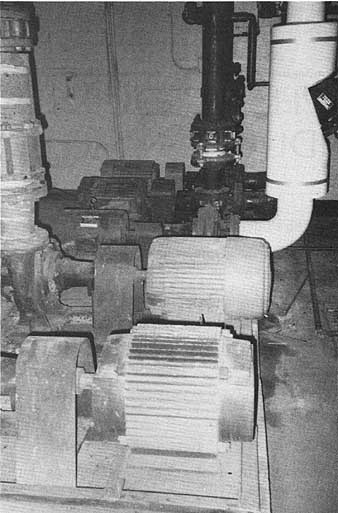
ill. 1 Three phase motors used for pumping application
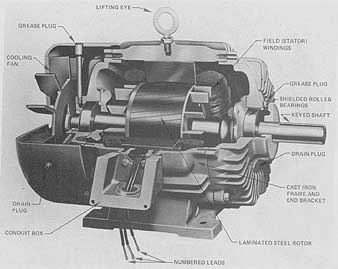
ill. 2 Cutaway view of construction and features of a typical three-phase
explosion-proof motor: FIELD STATOR WINDINGS; GREASE PLUG; LIFTING EYE
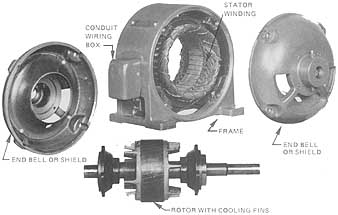
ill. 3 Main components of a squirrel-cage induction motor: —ROTOR WITH
COOLING FINS; CONDUIT WIRING BOX
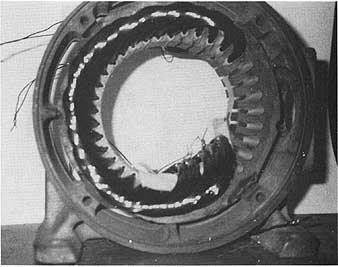
ill. 4 Partially wound stator of three phase motor
Stator
A typical stator contains a three-phase winding mounted in the slots of a laminated steel core (ill 4). The winding itself consists of formed coils of wire connected so that there are three single-phase windings spaced 120 electrical degrees apart. The three separate single-phase windings are then connected, usually internally, in either wye or delta. Three or nine leads from the three-phase stator windings are brought out to a terminal box mounted on the frame of the motor for single- or dual-voltage connections.
Rotor
The revolving part of the motor consists of steel punchings or laminations arranged in a cylindrical core ( 5 to 7). Copper or aluminum bars are mounted near the surface of the rotor. The bars are brazed or welded to two copper end rings. In some small squirrel-cage induction motors, the bars and end rings are cast in one piece from aluminum.
ill 5 shows such a rotor. Note that fins are cast into the rotor to circulate air and cool the motor while it's running. Note also that the rotor bars between the rings are skewed at an angle to the faces of the rings. Because of this design, the running motor will be quieter and smoother in operation. A keyway is visible on the left end of the shaft. A pulley or load shaft coupling can be secured using this keyway.
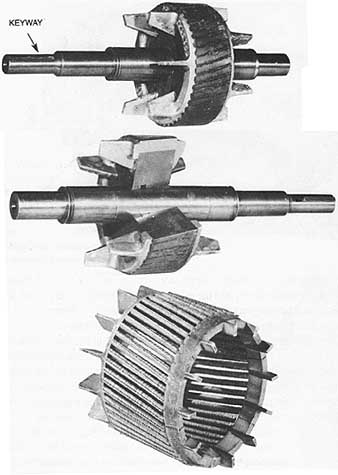
ill. 5 Squirrel cage rotor for an induction motor; ill. 6 Cutaway view
of a cage rotor; ill. 7 Squirrel-cage form for an induction motor
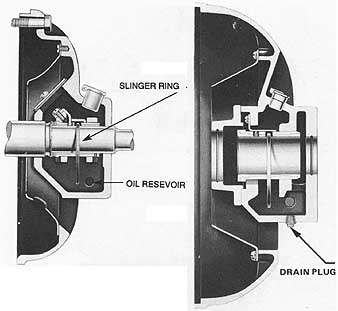
ill. 8: Sleeve-bearing end shield for an open polyphase motor: SLINGER
RING, OIL RESEVOIR; ill. 9: Sleeve-bearing end shield for a polyphase
induction motor.
Shaft Bearings
Typical sleeve bearings are illustrated in 8 and 9. The inside walls of the sleeve bearings are made of a babbitt metal which provides a smooth, polished, and long wearing surface for the rotor shaft. A large oversized oil slinger ring fits loosely around the rotor shaft and extends down into the oil reservoir. This ring picks up and slings oil on the rotating shaft and bearing surfaces. Two oil rings are illustrated in 10. This lubricating oil film minimizes friction losses. An oil inspection cup on the side of each end shield enables maintenance personnel to check the level of the oil in the sleeve bearing.
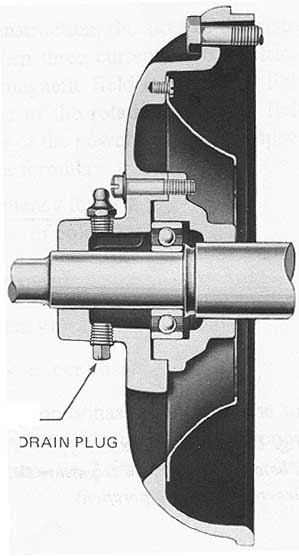
ills 14-11 to 14-14 illustrate ball bearing units. In some motors, ball bearings are used instead of sleeve bearings. Grease rather than oil is used to lubricate ball bearings. This type of bearing usually is two-thirds full of grease at the time the motor is assembled. Special fittings are provided on the end bells so that a grease gun can be used to apply additional lubricant to the ball bearing units at periodic intervals.
When lubricating roller bearings, remove the bottom plug so that the old grease is forced out. The manufacturer’s specifications for the motor should be consulted for the lubricant grade recommended, the lubrication procedure, and the bearing loads.
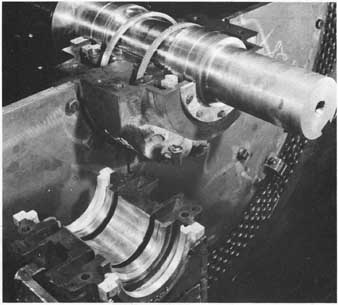
ill. 10 Partially assembled sleeve bearing for a totally enclosed,
1,250-hp motor
ill. 11 Ball bearing end shield for an open polyphase motor
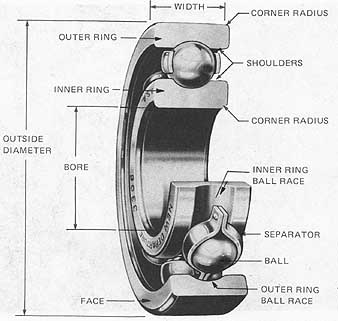
ill. 12 Cutaway section of a single-row ball bearing:
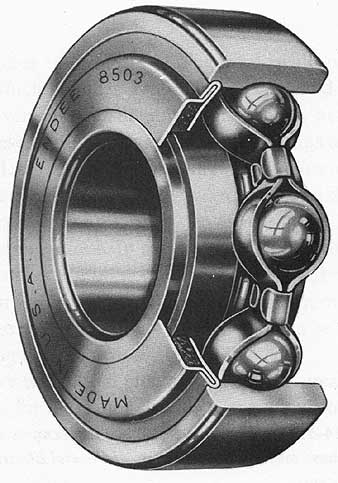
ill. 13 Single, sealed-type ball bearing.
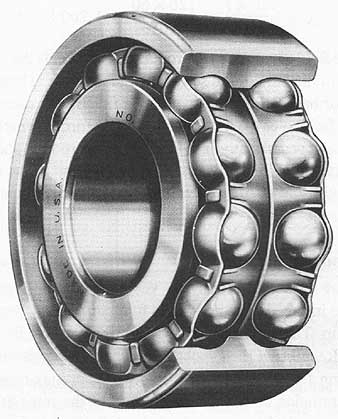
ill. 14 Double-row ball bearing.
PRINCIPLE OF OPERATION OF A SQUIRREL-CAGE MOTOR
As stated in a previous paragraph on the stator construction, the slots of the stator core contain three separate single-phase windings. When three currents 120 electrical degrees apart pass through these windings, a rotating magnetic field results. This field travels around the inside of the stator core. The speed of the rotating magnetic field depends on the number of stator poles and the frequency of the power source. This speed is called the synchronous speed and is determined by the formula:
Synchronous speed RPM = 120 x frequency in hertz / Number of poles
S = 120xf / p
S = Synchronous speed
f = Hertz (frequency)
p = Number of poles per phase
Example 1. If a three-phase, squirrel-cage induction motor has six poles on the stator winding and is connected to a three-phase, 60-hertz source, then the synchronous speed of the revolving field is 1,200 RPM-Revolutions Per Minute.
S = 120xf / p = 120x60 / 6 = 1,200RPM
As this magnetic field rotates at synchronous speed, it cuts the copper bars of the rotor and induces voltages in the bars of the squirrel-cage winding. These induced voltages set up currents in the rotor bars which in turn create a field in the rotor core. This rotor field reacts with the stator field to cause a twisting effect or torque which turns the rotor. The rotor always turns at a speed slightly less than the synchronous speed of the stator field. This means that the stator field will always cut the rotor bars. If the rotor turns at the same speed as the stator field, the stator field won't cut the rotor bars and there will be no induced voltage or torque.
Speed Regulation and Percent Slip
The squirrel-cage induction motor has very good speed regulation characteristics (the ratio of difference in speed from no load to full load). Speed performance is measured in terms of percent slip. The synchronous speed of the rotating field of the stator is used as a reference point. Recall that the synchronous speed depends on the number of stator poles and the operating frequency. Since these two quantities remain constant, the synchronous speed also remains constant. If the speed of the rotor at full load is deducted from the synchronous speed of the stator field, the difference is the number of revolutions per minute that the rotor slips behind the rotating field of the stator.
Percent Slip = [(synchronous speed — rotor speed) / synchronous speed] x 100
Example 2. If the three-phase, squirrel-cage induction motor used in Example 1 has a synchronous speed of 1,200 r/min and a full-load speed of 1,140 r/min, find the percent of slip.
Synchronous speed (Example 1) = 1,200 RPM
Full-load rotor speed = 1,140 RPM
Percent slip = [(synchronous speed - rotor speed) / synchronous speed] x 100
Percent slip = [(1200 - 1140) / 1200] x 100
Percent slip = 60 / 1200 x 100 = 0.05 x 100
Percent slip = 5%
For a squirrel-cage induction motor, as the value of percent slip decreases toward 0%, the speed performance of the motor is improved. The average range of percent slip for squirrel-cage induction motors is 2 percent to 6 percent.
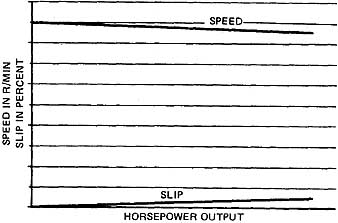
ill. 15: Speed curve and percent slip curve.
ill 15 shows a speed curve and a percent slip for squirrel-cage induction motor operating between no load and full load. The rotor speed at no load, slips behind the synchronous speed of the rotating stator field just enough to create the torque required to overcome friction and windage losses at no load. As a mechanical load is applied to the motor shaft, the rotor tends to slow down. This means that the stator field (turning at a fixed speed) cuts the rotor bars a greater number of times in a given period. The induced voltages in the rotor bars increase, resulting in more current in the rotor bars and a stronger rotor field. There is a greater magnetic reaction between the stator and rotor fields which causes a stronger twisting effect or torque. This also increases stator current taken from the line. The motor is able to handle the increased mechanical load with very little decrease in the speed of the rotor.
Typical slip-torque curves for a squirrel-cage induction motor are shown in ill 16. The torque output of the motor in pound-feet (lb.ft) increases as a straight line with an increase in the value of percent slip as the mechanical load is increased to the point of full load. Beyond full load, the torque curve bends and finally reaches a maximum point called the breakdown torque. If the motor is loaded beyond this point, there will be a corresponding decrease in torque until the point is reached where the motor stalls. However, all induction motors have some slip in order to function. Starting torque isn't shown, but is approximately 300% of running torque.
Starting Current
When a three-phase, squirrel-cage induction motor is connected across the full line voltage, the starting surge of current momentarily reaches as high a value as 400% to 600% or more of the rated full-load current. At the moment the motor starts, the rotor is at a standstill. At this instant, therefore, the stator field cuts the rotor bars at a faster rate than when the rotor is turning. This means that there will be relatively high induced volt ages in the rotor which will cause heavy rotor current. The resulting input current to the stator windings will be high at the instant of starting. Because of this high starting current, starting protection rated as high as 300 percent of the rated full-load current for non-tune delay fuses is provided for squirrel-cage induction motor installations.
Most squirrel-cage induction motors are started at full voltage. If there are any questions concerning the starting of large sizes of motors at full voltage, the electric utility company should be consulted. In the event that the feeders and protective devices of the electric utility are unable to handle the large starting currents, reduced voltage starting circuits must be used with the motor.
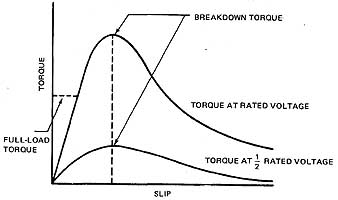
ill. 16 Slip-torque curves for a running squirrel-cage motor: FULL-LOAD
TORQUE, SLIP, TORQUE AT RATED VOLTAGE, BREAKDOWN TORQUE
Power Factor
The power factor of a squirrel-cage induction motor is poor at no-load and low-load conditions. At no load, the power factor can be as low as 15 percent lagging. However, as load is applied to the motor, the power factor increases. At the rated load, the power factor may be as high as 85 to 90 percent lagging.
The power factor at no load is low because the magnetizing component of input cur rent is a large part of the total input current of the motor. When the load on the motor is increased, the in-phase current supplied to the motor increases, but the magnetizing component of current remains practically the same. This means that the resultant line current is more nearly in phase with the voltage and the power factor is improved when the motor is loaded, compared with an unloaded motor which has its magnetizing current as a major component of the input current.
ill 17 shows the increase in power factor from a no-load condition to full load. In the no-load diagram, the in-phase current (Iw) is small when compared to the magnetizing current (Im) thus, the power factor is poor at no load. In the full-load diagram, the in-phase current has increased while the magnetizing current remains the same. As a result, the angle of lag of the line current decreases and the power factor increases.
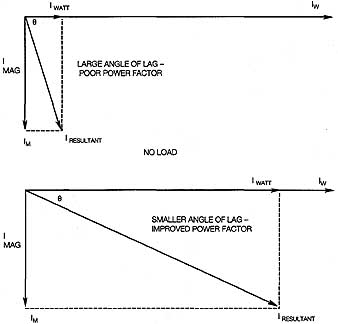
ill. 17 Power factor at no load and full load. LARGE ANGLE OF LAG -
POOR POWER FACTOR, NO LOAD, FULL LOAD
Reversing Rotation
The direction of rotation of a three-phase induction motor can be reversed readily. The motor will rotate in the opposite direction if any two of the three line leads are reversed (ill 18). The leads are reversed at the motor.
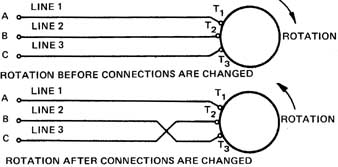
ill. 18: Reversing rotation of an induction motor: ROTATION BEFORE/AFTER
CONNECTIONS ARE CHANGED
Speed Control
A squirrel-cage induction motor has almost no speed variations without external controls. Recall that the speed of the motor depends on the frequency of the three-phase source and the number of poles of the stator winding.
The frequency of the supply line is usually 60 hertz, and is maintained at this value by the local power utility company. Since the number of poles in the motor is also a fixed value, the synchronous speed of the motor remains constant. As a result, it's not possible to obtain a range of speed without changing the applied frequency. It can be controlled by a variable-frequency ac electronic drive system, or by changing the number of poles using external controllers.
INDUCTION MOTORS WITH DUAL-VOLTAGE CONNECTIONS
Many three-phase, squirrel-cage induction motors are designed to operate at two different voltage ratings. E.g., a typical dual-voltage rating for a three-phase motor is 230/460 volts.
ill 19 shows a typical wye-connected stator winding which may be used for either 230 volts, three phase or 460 volts, three phase. Each of the three single-phase windings consist of two coil windings. There are nine leads brought out externally from this type of stator winding. These leads, identified as leads 1 to 9, end in the terminal box of the motor. To mark the terminals, start at the upper left-hand terminal T1 and proceed in a clock wise direction in a spiral toward the center, marking each lead as indicated in the figure.
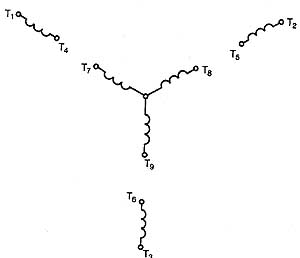
ill. 19: Method of Identifying terminal markings.
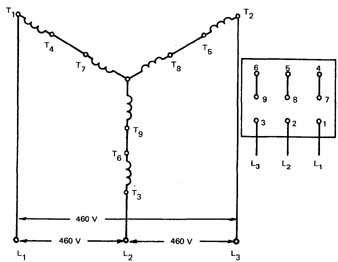
ill. 20: 460-volt wye connection. Coils are connected in series.
ill 20 shows the connections required to operate a motor from a 460-volt, three-phase source. The two coils of each single-phase winding are connected in series, ill 14-21 shows the connections to permit operation from a 230-volt, three-phase source.
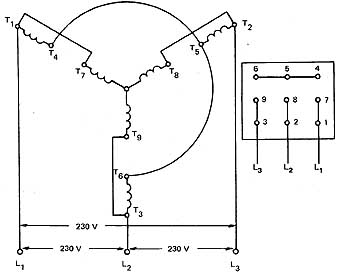
ill. 21: 230-volt wye connection. Coils are connected in parallel.
Star Connected Motors
If the lead identification of a 9-lead (dual-voltage), 3-phase, Star connected motor have been destroyed, the electrician must re-identify them before connecting the motor to the line. The following method may be used. First, identify the internally connected star point by checking for continuity between three of the leads as in ill 22 A.
Then identify the three other sets of coils by continuity between two leads at a time (ill 22 B). Assign T7, T8 and T9 to any of the three leads of the permanent star connected coils (a). Apply the lower rated line voltage for the motor to T7, T8 and T9 and operate to check the direction of rotation. Disconnect line voltage and connect one of the undetermined coils to T Reconnect power, leaving the lines on T7, T8 and T9. If the coil is correctly connected and is the proper coil, the voltage should be about 1.5 times the line voltage between the loose end and the other two lines. Be careful of line voltage.
If the correct coil is selected but reversed, the voltage between the loose end and the other two leads will be about 58% of the line voltage. If the wrong coil is selected, the voltage differences between the loose end and the other two line leads will be uneven (see ill 22 C).
When the readings are even and approximately 1.5 times the line voltage, mark the lead connected to T7 as T4 and other end of the coil as T1.
Perform the same tests with another coil connected to T Mark these leads T and T Perform the same test with the last coil connected to 19 to identify the 13 and 16 leads.
Connect L1 toT1, L2 to T2, L3 to T3 and T4 to T7, T5 to T8, T6 to T9, and operate the motor. The motor should operate in the same direction as before and operate quietly.
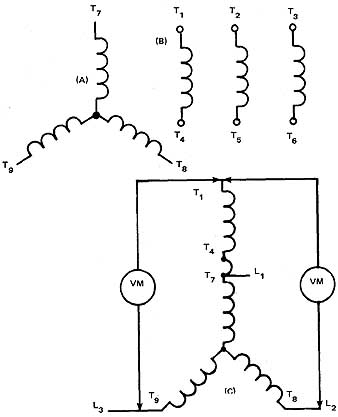
ill. 22: Star or Wye connected motor; A) Internal Star point lead marking;
B) coil group lead marking C) Checking for proper coil lead markings on
Wye connected, dual-voltage motor
Delta Connected Motors
Another connection pattern for three-phase motors is the Delta connected motor. It is so named because the resulting schematic pattern looks like the Greek letter Delta (delta symbol).
A method of identifying and connecting these leads is necessary because it's different than the Star or Wye connected motor.
Properly connecting the leads of a Delta connected, three-phase, dual-voltage motor presents a problem if the lead markings are destroyed.
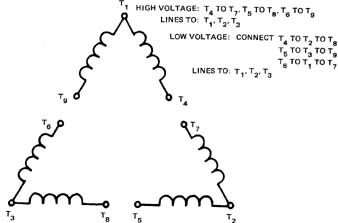
ill. 23: Nine leads of a Delta connected, three-phase, dual-voltage
motor
First, the electrician must determine if the motor is Delta connected or Star connected. Both motors have nine leads if they are dual-voltage motors. However, the Delta-connected motor has three sets of three leads that have continuity and the Star-connected motor has only one set of three.
To proceed, a sensitive ohmmeter is needed to find the middle of each group of three leads. The ohm values are low when using the dc power of an ohmmeter, so use care in identifying the center of each coil group. Label the center of each group T1, T2 and T3 respectively. Using masking tape, temporarily label the other leads of the T1 group as T4 and T9 See ill 23 A.
Temporarily mark the ends of the T2 group as T5 and T7 and mark the ends of the T3 group as T6 and T8.
Connect the lower motor voltage rating using lines 1, 2, and 3 to T1, T4, and T9. The other coils will have induced voltage, so be careful not to touch the other loose leads to each other or to you!
Disconnect the power and connect the lead marked T4 to T7. Reconnect the power as before and read the voltage between T1 and T2. If the markings are correct the voltage should be about twice the applied line voltage. If it reads about 1.5 times the line voltage, reconnect T4 to the lead marked T5. If the voltage T1 to T2 then goes to 220, reconnect T9 to T7 thereby reversing both coils. When the voltage T1 to T2 equals twice the applied line voltage, mark the leads connected together as T4 from the T1 group connected to T7 of the T2 group.
Now use the third coil group. Leave the lower line voltage connected to the first group as before. Test and connect the leads so that when T9 is connected to a lead of the third group, the T1-to-T2 voltage is twice the applied line voltage. Mark the lead connected to T9 as T6 and the other end of the coil group as T8.
To double check, disconnect the line’s lead from T9 and reconnect to T7 disconnect the line lead from T1 and reconnect it to T2 disconnect the line lead from T9 and reconnect it to T5 The motor should run in the same direction as before. If it does not, recheck the lead markings.
To check further, move the line leads from T7 to T8 from T2 to T6 and from T5 to T3. Start the motor. Rotation should be the same as in the previous steps. Be careful! Volt age is induced into other windings. (See ill 24).
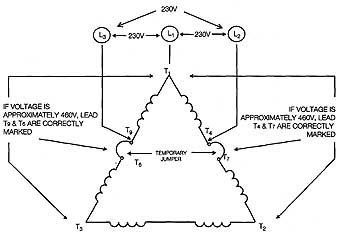
ill. 24 Illustration of voltage tests used to determine correct lead
markings on a Delta motor
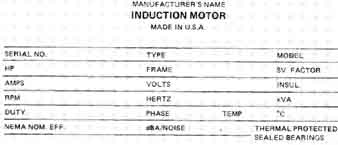
MOTOR NAMEPLATES
Motor nameplates provide information vital to the proper selection and installation of the motor. Most useful data given on the nameplate refers to the electrical characteristics of the motor. Given this information and using the National Electrical Code, the electrician can determine the conduit, wire, and starting and running protection sizes. (The NEC gives minimum requirements.)
 The design and performance data given on the nameplate is useful to maintenance
personnel. The information is vital for the fast and proper replacement
of the motor, if necessary. For a better understanding of the motor, typical
information found on motor nameplates is described as follows (ill 25).
The design and performance data given on the nameplate is useful to maintenance
personnel. The information is vital for the fast and proper replacement
of the motor, if necessary. For a better understanding of the motor, typical
information found on motor nameplates is described as follows (ill 25).
• The manufacturer’s name
• Type identifies the type of the enclosure. This is the manufacturer’s coded identification system.
• Serial number is the specific motor identification. This is the individual number assigned to the motor, similar to a social security number for a person. It is kept on file by the manufacturer.
• The model number is an additional manufacturer’s identification, commonly used for ordering purposes.
• Frame size identifies the measurements of the motor.
• Service factor (or SF)—a service factor of 1.0 means the motor shouldn't be expected to deliver more than its rated horsepower. The motor will operate safely if it's run at the rated horsepower times the service factor, maximum. Common ser vice- factors are 1.0 to 1.15. It is recommended that the motor not be run continuously in the service factor range. This may shorten the life expectancy of the insulation system.
Amperes means the current drawn from the line when the motor is operating at rated voltage and frequency at the fully rated nameplate horsepower.
• Volts should be the value measured at the motor terminals and should be the value for which the motor is designed.
• The class of insulation refers to the insulating material used in winding the motor stator. E.g., in a Class B system, the maximum operating temperature is 130°C; for Class F, it's 155°C; and for Class H, it's 180°C.
• RPM (or r/min) means the speed in revolutions per minute when all other nameplate conditions are met.
• Hertz is the frequency of the power system for which the motor is designed. Performance will be altered if it's operated at other frequencies.
• Duty is the cycle of operation that the motor can safely operate. “Continuous” means that the motor can operate fully loaded 24 hours a day. If “intermediate” is shown, a time interval will also appear. This means the motor can operate at full load for the specified period. The motor should then be stopped and allowed to cool before starting again.
• Ambient temperature specifies the maximum surrounding air temperature at which the motor can operate to deliver the rated horsepower.
• Phase entry indicates the number of voltage phases at which the motor is designed to operate.
• kVA is a code letter which indicates the locked rotor kVA per horsepower. This is used to determine starting equipment and protection for the motor. A code letter table is found in the National Electrical Code.
• Efficiency is expressed in percent. This value is found on standard motors as well as “premium efficiency” motors.
• Noise — some motors are designed for low noise emission. The noise level given on the nameplate is measured in “dBA” units of sound.
• Manufacturer’s notes — list specific features of the motors, such as “thermal protected” and /or “scaled bearings.”
ALTITUDE
Manufacturers’ guarantees for standard motor ratings are usually based on operation at any altitude up to 3,300 feet. Motors suitable for operation at an altitude higher than 3,300 feet above sea level are of special design and /or have a different insulation class. E.g., standard motors having a service factor of 1.15 may be operated up to an altitude of 9,900 feet by utilizing the service factor. At an altitude of 9,900 feet, the service factor would be 1.00. It may be necessary to de-rate the motor or use a larger frame size.
SUMMARY
Three-phase induction motors use a squirrel-cage winding in the rotor. There are no electrical connections to the rotor, but current is induced into the rotor windings by electromagnetic induction. The squirrel-cage winding produces a magnetic field that's pushed and pulled by the stator magnetic field.
The rotor is supported by a steel shaft that must rotate. The shaft is allowed to rotate with the application of different types of bearings and various lubrications. Synchronous speed, speed regulation and percent slip are all calculations used in determining the speed of the rotor. Motor electrical characteristics such as power factor and starting current are related to the electrical design of the motor.
If the motor lead markings become destroyed, the leads can be re-marked according to the procedures outlined in this unit. Motor nameplate data is critical information to be used when ordering replacement motors. Some nameplate information is essential for proper replacement of the operating characteristics and other data is used to size the electrical supply and the motor protection.
QUIZ
A. Answer the following statements and questions.
1. List the essential parts of a squirrel-cage induction motor.___________
2. State two advantages of using a squirrel-cage induction motor. _______
3. State two disadvantages of a squirrel-cage induction motor. ________
4. List the two factors which determine the synchronous speed of an induction motor.
5. Explain how to reverse the direction of rotation of a three-phase, squirrel-cage induction motor.
6. A four-pole, 60-hertz, three-phase, squirrel-cage induction motor has a full-load speed of 1,725 r/min. Determine the synchronous speed of this motor.
7. What is the percent slip of the motor given in question 6? ______________
8. Why is the term squirrel-cage applied to this type of three-phase induction motor?
B. Select the correct answer for each of the following statements.
9. Who or what determines if large induction motors may be started at full voltage across the line?
a. maximum motor size
b. rated voltage
c. the power company
d. department of building and safety
10. The power factor of a three-phase, squirrel-cage induction motor operating unloaded is __
a. the same as with full load.
b. very poor.
c. very good.
d. average.
11. The power factor of a three-phase, squirrel-cage induction motor operating with full load _____
a. improves from no load.
b. decreases from no load.
c. remains the same as at no load.
d. becomes 100 percent.
12. The squirrel-cage induction motor is popular because of its characteristics of:
a. high percent slip.
b. low percent slip.
c. simple, rugged construction.
d. good speed regulation.
13. The speed of a squirrel-cage induction motor depends on:
a. voltage applied.
b. frequency and number of poles.
c. Field strength.
d. current strength.
14. Speed is calculated using the formula:
a. p= (120xf)/ r/mm
b. RPM = 120xp / f
c. RPM=(p x f)/120
d. RPM = 120xf)/ p
C. Draw the following connection diagrams.
15. Show the connection arrangement for the nine terminal leads of a wye-connected three-phase motor rated at 230/460 volts for operation at 460 volts, three phase.
16. Show the connection arrangement for the nine terminal leads of a wye-connected three-phase motor rated at 230/460 volts for operation at 230 volts, three-phase.