AMAZON multi-meters discounts AMAZON oscilloscope discounts
(cont from part 1)
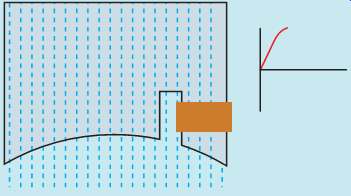
DETERMINING THE DIRECTION OF ROTATION FOR SPLIT PHASE MOTORS
==
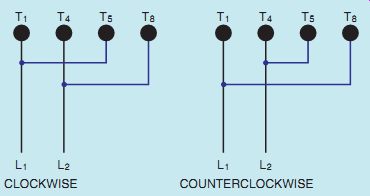
FGR. 26 Determining direction of rotation for a split-phase motor.
==
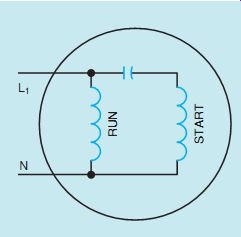
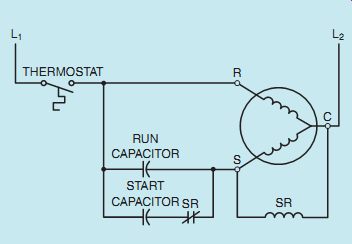
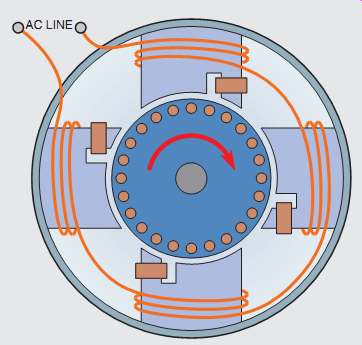
FGR. 27 A capacitor-start capacitor-run motor.
==
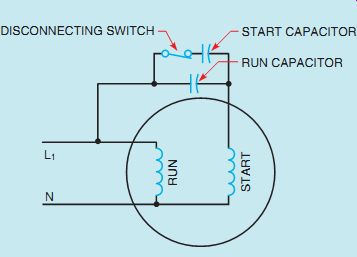
FGR. 28 Capacitor-start capacitor-run motor with additional starting
capacitor.
==
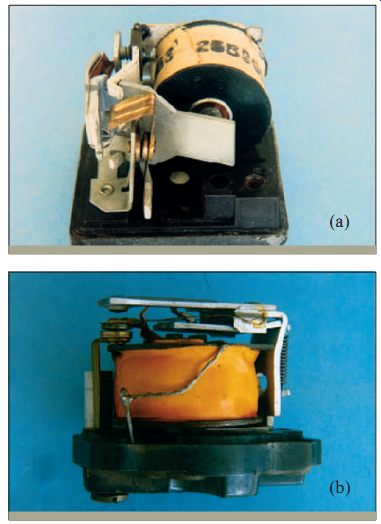
FGR. 29 Potential starting relays.
==
FGR. 30 Potential relay connection.
==
The direction of rotation of a single-phase motor can generally be determined when the motor is connected.
The direction of rotation is determined by facing the back or rear of the motor. FGR. 26 shows a connection diagram for rotation. If clockwise rotation is desired, T5 should be connected to T1.If counterclockwise rotation is desired, T8 (or T6) should be connected to T1. This connection diagram assumes that the motor contains two sets of run and two sets of start windings. The type of motor used will determine the actual connection.
For example, FGR. 24 shows the connection of a motor with two run windings and only one start winding. If this motor were to be connected for clockwise rotation, terminal T5 would have to be connected to T1, and terminal T8 would have to be connected to T2 and T3. If counterclockwise rotation is desired, terminal T8 would have to be connected to T1, and terminal T5 would have to be connected to T2 and T3.
CAPACITOR-START CAPACITOR-RUN MOTORS
Although the capacitor-start capacitor-run motor is a split-phase motor, it operates on a different principle than the resistance-start induction-run motor or the capacitor-start induction-run motor. The capacitor-start capacitor-run motor is designed in such a manner that its start winding remains energized at all times. A capacitor is connected in series with the winding to provide a continuous leading current in the start winding (FGR. 27). Since the start winding remains energized at all times, no centrifugal switch is needed to disconnect the start winding as the motor approaches full speed.
The capacitor used in this type of motor will generally be of the oil-filled type since it is intended for continuous use. An exception to this general rule are small fractional-horsepower motors used in reversible ceiling fans. These fans have a low cur rent draw and use an AC electrolytic capacitor to help save space.
The capacitor-start capacitor-run motor actually operates on the principle of a rotating magnetic field in the stator. Since both run and start windings remain energized at all times, the stator magnetic field continues to rotate and the motor operates as a two-phase motor. This motor has excellent starting and running torque. It is quiet in operation and has a high efficiency. Since the capacitor remains connected in the circuit at all times, the motor power factor is close to unity.
Although the capacitor-start capacitor-run motor does not require a centrifugal switch to disconnect the capacitor from the start winding, some motors use a second capacitor during the starting period to help improve starting torque (FGR. 28).
A good example of this can be found on the compressor of a central air conditioning unit designed for operation on single-phase power. If the motor is not hermetically sealed, a centrifugal switch is used to disconnect the start capacitor from the circuit when the motor reaches approximately 75% of rated speed. Hermetically sealed motors, however, must use some type of external switch to disconnect the start capacitor from the circuit.
The capacitor-start capacitor-run motor, or permanent split capacitor motor as it is generally referred to in the air conditioning and refrigeration industry, generally employs a potential starting relay to disconnect the starting capacitor when a centrifugal switch cannot be used. The potential starting relay, FGR. 29A and B, operates by sensing an increase in the voltage developed in the start winding when the motor is operating. A schematic diagram of a potential starting relay circuit is shown in FGR. 30.Inthiscircuit,the potential relay is used to disconnect the starting capacitor from the circuit when the motor reaches about 75% of its full speed. The starting relay coil, SR, is connected in parallel with the start winding of the motor. A normally closed SR contact is connected in series with the starting capacitor. When the thermostat contact closes, power is applied to both the run and start windings. At this point, both the start and run capacitors are connected in the circuit.
As the rotor begins to turn, its magnetic field induces a voltage into the start winding, producing a higher voltage across the start winding than the applied voltage. When the motor has accelerated to about 75%of its full speed, the voltage across the start winding is high enough to energize the coil of the potential relay. This causes the normally closed SR contact to open and disconnect the start capacitor from the circuit. Because the start winding of this motor is never disconnected from the power line, the coil of the potential starting relay remains energized as long as the motor is in operation.
===
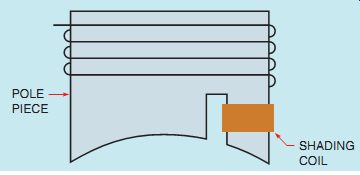
FGR. 31 A shaded pole.
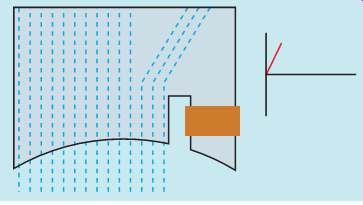
FGR. 32 The shading coil opposes a change of flux as current increases.
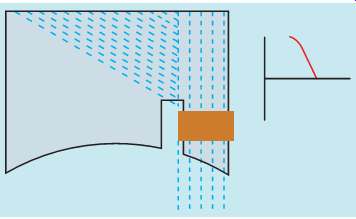
FGR. 34 The shading coil opposes a change of flux when the current decreases.
FGR. 33 There is opposition to magnetic flux when the current is not
changing.
====
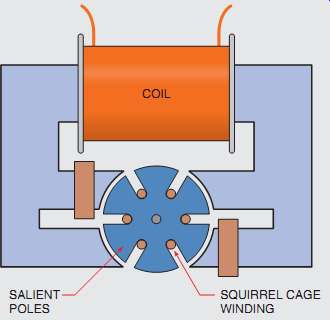
SHADED-POLE INDUCTION MOTORS
The shaded-pole induction motor is popular because of its simplicity and long life. This motor contains no start windings or centrifugal switch. It contains a squirrel-cage rotor and operates on the principle of a rotating magnetic field created by a shading coil wound on one side of each pole piece.
Shaded-pole motors are generally fractional horsepower motors used for low-torque applications such as operating fans and blowers.
THE SHADING COIL
The shading coil is wound around one end of the pole piece (FGR. 31). It is actually a large loop of copper wire or a copper band. The two ends are connected to form a complete circuit. The shading coil acts like a transformer with a shorted secondary winding. When the current of the AC wave form increases from zero toward its positive peak, a magnetic field is created in the pole piece. As magnetic lines of flux cut through the shading coil, a voltage is induced in the coil. Since the coil is a low resistance short circuit, a large amount of current flows in the loop. This current causes an opposition to the change of magnetic flux (FGR. 32). As long as voltage is induced into the shading coil, there will be an opposition to the change of magnetic flux.
When the AC current reaches its peak value, it is no longer changing, and no voltage is being induced into the shading coil. Since there is no current flow in the shading coil, there is no opposition to the magnetic flux. The magnetic flux of the pole piece is now uniform across the pole face (FGR. 33).
When the AC current begins to decrease from its peak value back toward zero, the magnetic field of the pole piece begins to collapse. A voltage is again induced into the shading coil. This induced voltage creates a current that opposes the change of magnetic flux (FGR. 34). This causes the magnetic flux to be concentrated in the shaded section of the pole piece.
When the AC current passes through zero and begins to increase in the negative direction, the same set of events happens, except that the polarity of the magnetic field is reversed. If these events were to be viewed in rapid order, the magnetic field would be seen to rotate across the face of the pole piece.
==
FGR. 35 Four-pole shaded-pole induction motor.
==

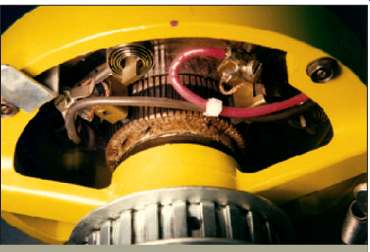
FGR. 36 Stator winding and rotor of a shaded-pole induction motor..
===
SPEED
The speed of the shaded-pole induction motor is determined by the same factors that deter mine the synchronous speed of other induction motors: frequency and number of stator poles.
Shaded-pole motors are commonly wound as four or six-pole motors. FGR. 35 shows a drawing of a four-pole shaded-pole induction motor.
GENERAL OPERATING CHARACTERISTICS
The shaded-pole motor contains a standard squirrel cage rotor. The amount of torque produced is determined by the strength of the magnetic field of the stator, the strength of the magnetic field of the rotor, and the phase angle difference between rotor and stator flux. The shaded pole induction motor has low starting and running torque.
The direction of rotation is determined by the direction in which the rotating magnetic field moves across the pole face. The rotor turns in the direction shown by the arrow in FGR. 35.
The direction can be changed by removing the stator winding and turning it around. This is not a common practice, however. As a general rule the shaded-pole induction motor is considered to be nonreversible. FGR. 36 shows a stator winding and rotor of a shaded-pole induction motor.
==
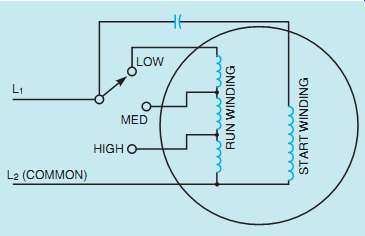
FGR. 37 A three-speed motor.
==
MULTISPEED MOTORS
There are two basic types of multispeed single phase motors. One is the consequent pole type and the other is a specially wound capacitor-start capacitor-run motor or shaded-pole induction motor. The consequent pole single-phase motor operates by reversing the current flow through alternate poles and increasing or decreasing the total number of stator poles. The consequent pole motor is used where high running torque must be maintained at different speeds; for example, in two-speed compressors for central air conditioning units.
MULTISPEED FAN MOTORS
Multispeed fan motors have been used for many years. They are generally wound for two to five steps of speed and operate fans and squirrel-cage blowers. A schematic drawing of a three-speed motor is shown in FGR. 37. Notice that the run winding has been tapped to produce low, medium, and high speed. The start winding is connected in parallel with the run winding section. The other end of the start winding lead is connected to an external oil-filled capacitor. This motor changes speed by inserting inductance in series with the run winding. The actual run winding for this motor is between the terminals marked high and common. The winding shown between high and medium is connected in series with the main run winding.
When the rotary switch is connected to the medium speed position, the inductive reactance of this coil limits the amount of current flow through the run winding. When the current of the run winding is reduced, the strength of its magnetic field is reduced and the motor produces less torque. This causes a greater amount of slip, and the motor speed decreases.
If the rotary switch is changed to the low position, more inductance is inserted in series with the run winding. This causes less current to flow through the run winding and another reduction in torque. When the torque is reduced, the motor speed decreases again.
Common speeds for a four-pole motor of this type are 1625, 1500, and 1350 RPM. Notice that this motor does not have wide ranges between speeds as would be the case with a consequent pole motor. Most induction motors would over heat and damage the motor winding if the speed were reduced to this extent. This type of motor, however, has much higher impedance windings than most motors. The run windings of most split-phase motors have a wire resistance of 1 to 4 ohm. This motor will generally have a resistance of 10 to 15 ohm in its run winding. It is the high impedance of the windings that permits the motor to be operated in this manner without damage.
Since this motor is designed to slow down when load is added, it is not used to operate high-torque loads-only low-torque loads such as fans and blowers.
SINGLE-PHASE SYNCHRONOUS MOTORS
Single-phase synchronous motors are small and develop only fractional horsepower. They operate on the principle of a rotating magnetic field developed by a shaded-pole stator. Although they will operate at synchronous speed, they do not require DC excitation current. They are used where constant speed is required, such as in clock motors, timers, and recording instruments, and as the driving force for small fans, because they are small and inexpensive to manufacture. There are two basic types of synchronous motor: the Warren, or General Electric motor, and the Holtz motor. These motors are also referred to as hysteresis motors.
==
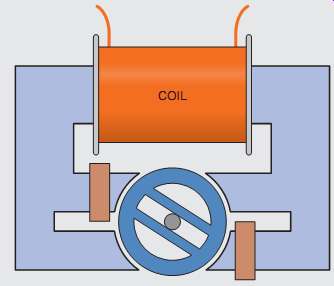
FGR. 38 A Warren motor.
==
FGR. 39 A Holtz motor.
==
FGR. 40 Armature and brushes of a universal motor.
==
FGR. 41 The compensating winding is connected in series with the series
field winding.
==
WARREN MOTORS
The Warren motor is constructed with a laminated stator core and a single coil. The coil is generally wound for 120-V AC operation. The core contains two poles, which are divided into two sections each.
One-half of each pole piece contains a shading coil to produce a rotating magnetic field (FGR. 38). Since the stator is divided into two poles, the synchro nous field speed is 3600 RPM when connected to 60 Hz.
The difference between the Warren and Holtz motor is the type of rotor used. The rotor of the Warren motor is constructed by stacking hardened steel laminations onto the rotor shaft. These disks have high hysteresis loss. The laminations form two crossbars for the rotor. When power is connected to the motor, the rotating magnetic field induces a voltage into the rotor, and a strong starting torque is developed, causing the rotor to accelerate to near-synchronous speed. Once the motor has accelerated to near-synchronous speed, the flux of the rotating magnetic field follows the path of minimum reluctance (magnetic resistance) through the two crossbars. This causes the rotor to lock in step with the rotating magnetic field, and the motor operates at 3600 RPM. These motors are often used with small gear trains to reduce the speed to the desired level.
HOLTZ MOTORS
The Holtz motor uses a different type of rotor (FGR. 39). This rotor is cut in such a manner that six slots are formed. These slots form six salient (projecting or jutting) poles for the rotor. A squirrel-cage winding is constructed by inserting a metal bar at the bottom of each slot. When power is connected to the motor, the squirrel-cage winding provides the torque necessary to start the rotor turning. When the rotor approaches synchronous speed, the salient poles will lock in step with the field poles each half cycle. This produces a rotor speed of 1200 RPM (one-third of synchronous speed) for the motor.
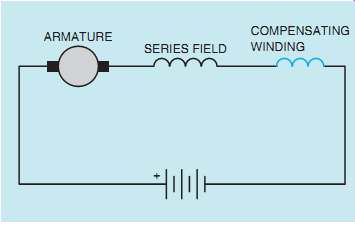
UNIVERSAL MOTORS
The universal motor is often referred to as an AC series motor. It is very similar to a DC series motor in its construction in that it contains a wound armature and brushes (FGR. 40). The universal motor, however, has the addition of a compensating winding. If a DC series motor were connected to alternating current, the motor would operate poorly for several reasons. The armature windings would have a large amount of inductive reactance when connected to alternating current. In addition, the field poles of most DC machines contain solid metal pole pieces. If the field were connected to AC, a large amount of power would be lost to eddy current induction in the pole pieces. Universal motors contain a laminated core to help prevent this problem. The compensating winding is wound around the stator and functions to counteract the inductive reactance in the armature winding.
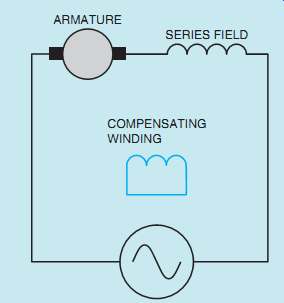
The universal motor is so named because it can be operated on AC or DC voltage. When it is operated on direct current, the compensating winding is connected in series with the series field winding (FGR. 41).
==
FGR. 42 Conductive compensation.
==
FGR. 43 Inductive compensation.
==
FGR. 44 Using the series field to set the brushes at the neutral plane
position.
==
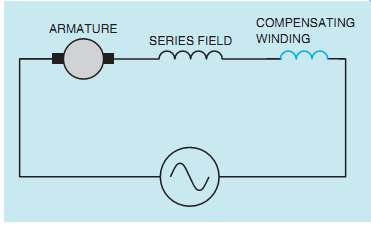
CONNECTING THE COMPENSATING WINDING FOR AC CURRENT
When the universal motor is operated with AC power, the compensating winding can be connected in two ways. If it is connected in series with the armature, as shown in FGR. 42, it is known as conductive compensation.
The compensating winding can also be connected by shorting its leads together as shown in FGR. 43. When connected in this manner, the winding acts like a shorted secondary winding of a transformer. Induced current permits the winding to operate when connected in this manner. This connection is known as inductive compensation. Inductive compensation cannot be used when the motor is connected to direct current.
THE NEUTRAL PLANE
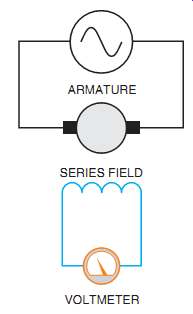
Since the universal motor contains a wound armature, commutator, and brushes, the brushes should be set at the neutral plane position. This can be done in the universal motor in a manner similar to that of setting the neutral plane of a DC machine. When setting the brushes to the neutral plane position in a universal motor, either the series or compensating winding can be used. To set the brushes to the neutral plane position using the series winding (FGR. 44), alternating current is connected to the armature leads. A voltmeter is connected to the series winding. Voltage is then applied to the armature. The brush position is then moved until the voltmeter connected to the series field reaches a null position. (The null position is reached when the voltmeter reaches its lowest point.)
===
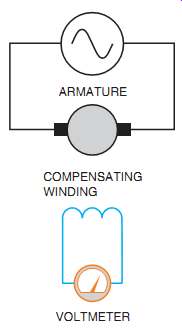
FGR. 45: Using the compensating winding to set the brushes to the neutral plane
position.
===
If the compensating winding is used to set the neutral plane, alternating current is again connected to the armature and a voltmeter is connected to the compensating winding (FGR. 45). Alternating cur rent is then applied to the armature, and the brushes are moved until the voltmeter indicates its highest or peak voltage.
SPEED REGULATION
The speed regulation of the universal motor is very poor. Since it is a series motor, it has the same poor speed regulation as a DC series motor. If the universal motor is connected to a light load or no load, its speed is almost unlimited. It is not unusual for this motor to be operated at several thousand revolutions per minute. Universal motors are used in a number of portable appliances where high horsepower and light weight are needed, such as drill motors, skill saws, and vacuum cleaners. The universal motor is able to produce a high horse power for its size and weight because of its high operating speed.
CHANGING THE DIRECTION OF ROTATION
The direction of rotation of the universal motor can be changed in the same manner as changing the direction of rotation of a DC series motor. To change the direction of rotation, change the armature leads with respect to the field leads.
SUMMARY
• Not all single-phase motors operate on the principle of a rotating magnetic field.
• Split-phase motors start as two-phase motors by producing an out-of-phase condition for the current in the run winding and the current in the start winding.
• The resistance of the wire in the start winding of a resistance-start induction-run motor is used to produce a phase angle difference between the current in the start winding and the current in the run winding.
• The capacitor-start induction-run motor uses an AC electrolytic capacitor to increase the phase angle difference between starting and running current. This causes an increase in starting torque.
• Maximum starting torque for a split-phase motor is developed when the start winding current and run winding current are 90° out of phase with each other.
• Most resistance-start induction-run motors and capacitor-start induction-run motors use a centrifugal switch to disconnect the start windings when the motor reaches approximately 75% of full-load speed.
• The capacitor-start capacitor-run motor operates like a two-phase motor because both the start and run windings remain energized during motor operation.
• Most capacitor-start capacitor-run motors use an AC oil-filled capacitor connected in series with the start winding.
• The capacitor of the capacitor-start capacitor run motor helps correct the power factor.
• Shaded-pole induction motors operate on the principle of a rotating magnetic field.
• The rotating magnetic field of a shaded-pole induction motor is produced by placing shading loops or coils on one side of the pole piece.
• The synchronous field speed of a single-phase motor is determined by the number of stator poles and the frequency of the applied voltage.
• Consequent pole motors are used when a change of motor speed is desired and high torque must be maintained.
• Multispeed fan motors are constructed by connecting windings in series with the main run winding.
• Multispeed fan motors have high-impedance stator windings to prevent them from overheating when their speed is reduced.
• The direction of rotation for split-phase motors is changed by reversing the start winding in relation to the run winding.
• Shaded-pole motors are generally considered to be nonreversible.
• There are two types of single-phase synchronous motor: the Warren and the Holtz.
• Single-phase synchronous motors are sometimes called hysteresis motors.
• The Warren motor operates at a speed of 3600 RPM.
• The Holtz motor operates at a speed of 1200 RPM.
• Universal motors operate on direct or alternating current.
• Universal motors contain a wound armature and brushes.
• Universal motors are also called AC series motors.
• Universal motors have a compensating winding that helps overcome inductive reactance.
• The direction of rotation for a universal motor can be changed by reversing the armature leads with respect to the field leads.
QUIZ
1. What are the three basic types of split-phase motors?
2. The voltages of a two-phase system are how many degrees out of phase with each other?
3. How are the start- and run-windings of a split-phase motor connected in relation to each other?
4. In order to produce maximum starting torque in a split-phase motor, how many degrees out of phase should the start and run winding currents be with each other?
5. What is the advantage of the capacitor-start induction-run motor over the resistance-start induction run motor?
6. On the average, how many degrees out of phase with each other are the start and run winding currents in a resistance-start induction run motor?
7. What device is used to disconnect the start windings for the circuit in most non-hermetically sealed capacitor-start induction run motors?
8. Why does a split-phase motor continue to operate after the start windings have been disconnected from the circuit?
9. How can the direction of rotation of a split-phase motor be reversed?
10. If a dual-voltage split-phase motor is to be operated on high voltage, how are the run windings connected in relation to each other?
11. When determining the direction of rotation for a split-phase motor, should you face the motor from the front or from the rear?
12. What type of split-phase motor does not generally contain a centrifugal switch?
13. What is the principle of operation of a capacitor-start capacitor run motor?
14. What causes the magnetic field to rotate in a shaded-pole induction motor?
15. How can the direction of rotation of a shaded-pole induction motor be changed?
16. How is the speed of a consequent pole motor changed?
17. Why can a multispeed fan motor be operated at lower speed than most induction motors without harm to the motor windings?
18. What is the speed of operation of the Warren motor?
19. What is the speed of operation of the Holtz motor?
20. Why is the AC series motor often referred to as a universal motor?
21. What is the function of the compensating winding?
22. How is the direction of rotation of the universal motor reversed?
23. When the motor is connected to DC voltage, how must the compensating winding be connected? 24. Explain how to set the neutral plane position of the brushes using the series field.
25. Explain how to set the neutral plane position using the compensating winding.
A PRACTICAL APPLICATION:
You are an electrical contractor, and you have been called to a home to install a well pump. The home owner has purchased the pump but does not know how to connect it. You open the connection terminal cover and discover that the motor contains 8 terminal leads marked T1 through T8. The motor is to be connected to 240 V. At present, the T leads are connected as follows: T1,T3,T5, and T7 are connected together; and T2, T4,T6, and T8 are connected together. Line L1 is connected to the group of terminals with T1, and line L2 is connected to the group of terminals with T2. Is it necessary to change the leads for operation on 240 V? If so, how should they be connected?