AMAZON multi-meters discounts AMAZON oscilloscope discounts
Cont. from part 5
Motor Selection
AC and DC motors come in many shapes and sizes. Some are standardized electric motors for general-purpose applications. Other electric motors are intended for specific tasks. In any case, electric motors should be selected to satisfy the requirements of the machines on which they are applied without exceeding rated electric motor temperature. The following are some of the important motor and load parameters that need to be considered as part of the selection process.
Mechanical Power Rating
The mechanical power rating of motors is expressed in either horsepower (hp) or watts (W): 1 hp = 746 W. Two important factors that determine mechanical power output are torque and speed. Torque and speed are related to horsepower by a basic formula, which states that:
Horsepower = Torque × Speed/Constant
... where ...
- Torque is expressed in lb/ft.
- Speed is expressed in rpm.
The value of the constant depends on the unit that is used for torque. For this combination the constant is 5,252.
The slower the motor operates, the more torque it must produce to deliver the same amount of horsepower. To withstand the greater torque, slow motors need stronger components than those of higher-speed motors of the same power rating. For this reason, slower motors are generally larger, heavier, and more expensive than faster motors of equivalent horsepower rating.
Current
Full-load amperes is the amount of amperes the motor can be expected to draw under full-load (torque) conditions and is also known as the name plate amperes. The nameplate full-load current of the motor is used in determining the size of overload sensing elements for the motor circuit.
Locked Rotor Current is the amount of current the motor can be expected to draw under starting conditions when full voltage is applied and is also known as the starting inrush current .
Service Factor Amperes is the amount of current the motor will draw when it’s subjected to a percentage of overload equal to the service factor on the name plate of the motor. E.g., a service factor of 1.15 on the nameplate means the motor will handle 115 % of normal running current indefinitely without damage.
Code Letter
NEMA code letters are assigned to motors for calculating the locked rotor current in amperes based upon the kilovolt- amperes per horsepower per nameplate horse power. Overcurrent protection devices must be set above the locked-rotor current of the motor to prevent the over current protection device from opening when the rotor of the motor is starting. The letters range in alphabetical order from A to V in increasing value of locked rotor current.
====
Locked-Rotor Code, kVA/hp
A 0-3.15 G 5.6-6.3 B 3.15-3.55 H 6.3-7.1 C 3.55-4.0 J 7.1-8.0 D 4.0-4.5 K 8.0-9.0 E 4.5-5.0 L 9.0-10.0 F 5.0-5.6 M 10.0-11.2
====
LR current (single-phase motors) = Code letter value × hp × 1,000/Rated voltage
LR current (three-phase motors) = Code letter value × hp × 577/Rated voltage
Design Letter
NEMA has defined four standard motor designs for AC motors, using the letters A, B, C, and D to meet specific requirements posed by different application loads. The design letter denotes the motor's performance characteristics relating to torque, starting current, and slip. Design B is the most common design. It has relatively high starting torque with reasonable starting currents. The other designs are used only on fairly specialized applications.
Efficiency
Motor efficiency is the ratio of mechanical power output to the electrical power input, usually expressed as a percentage. The power input to the motor is either transferred to the shaft as power output or is lost as heat through the body of the motor. Power losses associated with the operation of a motor include:
Core loss , which represents the energy required to magnetize the core material (known as hysteresis) and losses owing to the creation of small electric currents that flow in the core (known as eddy currents).
Stator and rotor resistance losses, which represent the I ^2 R heating loss due to current flow ( I ) through the resistance ( R ) of the stator and rotor windings, and are also known as copper losses .
Mechanical losses which include friction in the motor bearings and the fan for air cooling.
Stray losses, which are the losses that remain after primary copper and secondary losses, core losses, and mechanical losses. The largest contributor to the stray losses is harmonic energy generated when the motor operates under load. This energy is dissipated as currents in the copper windings, harmonic flux components in the iron parts, and leakage in the laminate core.
Energy-Efficient Motors
The efficiency of electric motors ranges between 75 and 98 %. Energy-efficient motors use less energy because they are manufactured with higher-quality materials and techniques. To be considered energy-efficient, a motor's performance must equal or exceed the nominal full-load efficiency values provided by NEMA in publication MG-1.
Frame Size
Motors come in various frame sizes to match the requirements of the application. In general, the frame size gets larger with increasing horsepower or with decreasing speeds. In order to promote standardization in the motor industry, NEMA prescribes standard frame sizes for certain dimensions of standard motors. As an example, a motor with a frame size of 56 will always have a shaft height above the base of 3½”.
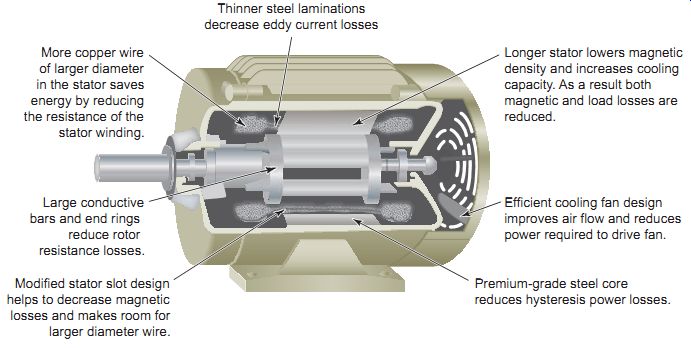
Ill. 59 Typical energy-efficient motor. More copper wire Thinner steel
laminations decrease eddy current losses; More copper wire of larger diameter
in the stator saves energy by reducing the resistance of the stator winding.
Modified stator slot design helps to decrease magnetic losses and makes room for larger diameter wire.
Large conductive bars and end rings reduce rotor resistance losses.; Longer stator lowers magnetic density and increases cooling capacity. As a result both magnetic and load losses are reduced.
Efficient cooling fan design improves air flow and reduces power required to drive fan.
Premium-grade steel core reduces hysteresis power losses.
Frequency
This is the frequency of the line power supply for which an AC motor is designed to operate. Electric motors in North America are designed to operate on 60-Hz power, whereas most of the rest of the world uses 50 Hz. It’s important to make sure equipment designed to operate on 50 Hz is properly designed or converted to provide good service life at 60 Hz. As an example, a three-phase change in frequency from 50 to 60 Hz can result in a 20 % increase in rotor rpm.
Full-Load Speed
Full-load speed represents the approximate speed at which the motor will run when it’s supplying full rated torque or horsepower. As an example, a typical four-pole motor running on 60 Hz might have a nameplate rating of 1,725 rpm at full load, while its synchronous speed is 1,800 rpm.

Ill. 60 Constant-torque load. Torque demanded by the load;

Ill. 61 Variable-torque load. Horsepower demanded by the load
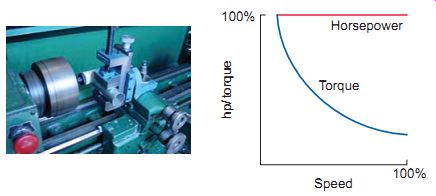
Ill. 62 Constant-horsepower load.
Load Requirements
Load requirements must be considered in selecting the correct motor for a given application. This is especially true in applications that require speed control. Important requirements a motor must meet in controlling a load are torque and horsepower in relation to speed.
Constant-torque loads--With a constant torque, the load is constant throughout the speed range. As speed increases, the torque required remains constant while the horsepower increases or decreases in proportion to the speed. Typical constant torque applications are conveyors, hoists, and traction devices. With such applications, as speed increases, the torque required remains constant while the horsepower increases or decreases in proportion to the speed. E.g., a conveyor load requires about the same torque at 5 ft/min as it does at 50 ft/min. However, the horsepower requirement increases with speed.
Variable-torque loads--Variable torque is found in loads having characteristics that require low torque at low speed, and increasing values of torque as the speed is increased. Examples of loads that exhibit variable-torque characteristics are centrifugal fans, pumps, and blowers. When sizing motors for variable-torque loads it’s important to provide adequate torque and horsepower at the maximum speed.
Constant-horsepower loads--Constant-horsepower loads require high torque at low speeds and low torque at high speeds, which results in constant horse power at any speed (Ill. 62). One example of this type of load would be a lathe. At low speeds, the machinist takes heavy cuts, using high levels of torque. At high speeds, the operator makes finishing passes that require much less torque. Other examples are drilling and milling machines.
High-inertia loads--Inertia is the tendency of an object that is at rest to stay at rest or an object that is moving to keep moving. A high-inertia load is one that is hard to start. A great deal of torque is needed to get the load up and running, but less torque is required to keep it operating. High-inertia loads are usually associated with machines using flywheels to supply most of the operating energy. Applications include large fans, blowers, punch presses, and commercial washing machines.
Motor Temperature Ratings
A motor's insulation system separates electrical components from each other, preventing short circuits, and thus winding burnout and failure. Insulation's major enemy is heat, so it's important to be familiar with the different motor temperature ratings in order to keep the motor operating within safe temperature limits.
Ambient temperature is the maximum safe room temperature surrounding the motor if it’s going to be operated continuously at full load. When a motor is started, its temperature will begin to rise above that of the surrounding, or ambient, air. In most cases the standardized ambient temperature rating is 40° C (104° F). While this standard rating represents a very warm room, special applications may require motors with a higher temperature capability such as 50° or 60° C.
Temperature rise is the amount of temperature change that can be expected within the winding of the motor from its non-operating (cool) condition to its temperature at full-load continuous operating condition. The heat causing the temperature rise is a result of electrical and mechanical losses, and a characteristic of a motor's design.
Hot-spot allowance must be made for the difference between the measured temperature of the winding and the actual temperature of the hottest spot within the winding, usually 5° to 15° C, depending upon the type of motor construction. The sum of the temperature rise, the hot-spot allowance, and the ambient temperature must not exceed the temperature rating of the insulation.
Insulation class of a motor is designated by letter according to the temperature it’s capable of with standing without serious deterioration of its insulating properties.
Duty Cycle
The duty cycle refers to the length of time a motor is expected to operate under full load. Motor ratings according to duty are continuous duty and intermittent duty. Continuous duty-rated motors are rated to be run continuously without any damage or reduction in life of the motor. General-purpose motors will normally be rated for continuous duty. Intermittent-duty motors are rated for short operating periods and then must be allowed to stop and cool before restarting. E.g., crane motors and hoists are often rated for intermittent duty.
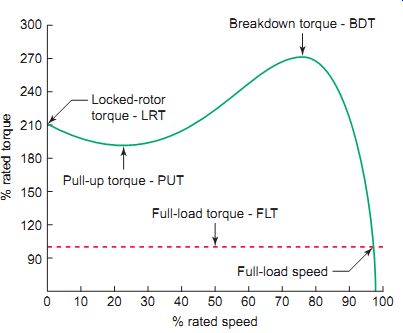
Ill. 63 Motor torque/speed curve. Breakdown torque - BDT Locked-rotor
torque - LRT Pull-up torque - PUT Full-load torque - FLT Full-load speed
Torque
Motor torque is the twisting force exerted by the shaft of a motor. The torque/speed curve of Ill. 63 shows how a motor's torque production varies throughout the different phases of its operation.
Locked-rotor torque (LRT), also called starting torque, is produced by a motor when it’s initially energized at full voltage. It’s the amount of torque available to overcome the inertia of a motor at stand still. Many loads require a higher torque to start them moving than to keep them moving.
Pull-up torque (PUT) is the minimum torque generated by a motor as it accelerates from standstill to operating speed. If a motor is properly sized to the load, pull-up torque is brief. If a motor's pull-up torque is less than that required by its application load, the motor will overheat and stall. Some motors don’t have a value of pull-up torque because the lowest point on the torque/speed curve may occur at the locked rotor point. In this case pull-up torque is the same as the locked rotor torque.
Breakdown torque (BDT), also called pull-out torque, is the maximum amount of torque a motor can attain without stalling. Typical induction motor break down torque varies from 200 to 300 % of full load torque. High breakdown torque is necessary for applications that may undergo frequent overloading.
One such application is a conveyor belt. Often, conveyor belts have more product placed upon them than their rating allows. High breakdown torque enables the conveyor to continue operating under these conditions without causing heat damage to the motor.
Full-load torque (FLT) is produced by a motor functioning at a rated speed and horsepower. The operating life is significantly diminished in motors continually run at levels exceeding full-load torque.
Motor Enclosures
Motor enclosures are designed to provide adequate protection, depending on the environment in which the motor has to operate. The selection of the proper enclosure is vital to the successful safe operation of a motor. Using a motor enclosure inappropriate for the application can significantly affect motor performance and life. The two general classifications of motor enclosures are open and totally enclosed. An open motor has ventilating openings, which permit passage of external air over and around the motor windings. A totally enclosed motor is constructed to prevent the free exchange of air between the inside and outside of the frame, but not sufficiently enclosed to be termed airtight.
Open and totally enclosed categories are further broken down by enclosure design, type of insulation, and/or cooling method. The most common of these types are:
Open drip-proof (ODP) motors are open motors in which all ventilating openings are so constructed that drops of liquid or solid particles falling on the motor at any angle from 0 to 15 degrees from vertical cannot enter the machine. This is the most common type and is designed for use in nonhazardous, relatively clean, industrial areas.
Totally enclosed, fan-cooled (TEFC) motors are enclosed motors equipped for external cooling by means of a fan integral with the motor, but external to the enclosed parts. They are designed for use in extremely wet, dirty, or dusty areas.
Totally enclosed, non-ventilated (TENV) motors are enclosed motors generally limited to small sizes (usually under 5 hp) where the motor surface area is large enough to radiate and convey the heat to the outside air without an external fan or airflow. They are particularly effective in textile applications where a fan would regularly clog with lint.
Hazardous location motors are designed with enclosures suitable for environments in which explosive or ignitable vapors or dusts are present, or are likely to become present. These special motors are required to ensure that any internal fault in the motor won’t ignite the vapor or dust. Every motor approved for hazardous locations carries a UL nameplate that indicates the motor is approved for that duty. This label identifies the motor as having been designed for operation in Class I or Class II locations. The class identifies the physical characteristics of the hazardous materials present at the location where the motor will be used. The two most common hazardous location motors are Class I explosion-proof and Class II dust ignition resistant.
Explosion-proof applies only to Class I environments, which are those that involve potentially explosive liquids, vapors, and gases. Dust ignition resistant motors are used in environments that contain combustible dusts such as coal, grain, or flour. Some motors may be approved for both Class I and II locations.

Ill. 64 Motor enclosures. Baldor Electric Company. www.baldor.com. Open
enclosure Totally enclosed enclosure
Metric Motors
When you need a replacement for a metric (IEC) motor installed on imported equipment, the most practical way to proceed is to get an exact metric replacement motor.
When direct replacements are not available the following may need to be considered:
• Metric motors are rated in kilowatts (kW) rather than horsepower (hp). To convert from kilowatts to horsepower, multiply the kW rating of the motor by 1.34. For example, a 2-kW metric motor would be equal to approximately 2.7 hp and the closest NEMA equivalent would be 3 hp.
• Metric motors may be rated for 50- rather than 60-Hz speed. The following table shows a comparison of 50- and 60-Hz induction motor speeds.
• NEMA and IEC standards both use letter codes to indicate specific mechanical dimensions, plus number codes for general frame size. IEC motor frame sizes are given in metric dimensions, making it impossible to get complete interchangeability with NEMA frame sizes.
• Although there is some correlation between NEMA and IEC motor enclosures, it’s not always possible to show a direct cross-reference from one standard to the other. Like NEMA, IEC has designations indicating the protection provided by a motor's enclosure. However, where the NEMA designation is in words, such as open drip proof or totally enclosed fan-cooled, IEC uses a two-digit index of protection (IP) designation. The first digit indicates how well protected the motor is against the entry of solid objects; the second digit refers to water entry.
• IEC winding insulation classes parallel those of NEMA, and in all but very rare cases use the same letter designations.
• NEMA and IEC duty cycle ratings are different.
Where NEMA commonly designates continuous or intermittent duty, IEC uses eight duty cycle designations.
• CE is an acronym for the French phrase Conformité Européene and is similar to the UL or CSA marks of North America. However, unlike UL (Under writers Laboratories) or CSA (Canadian Standards Association), which require independent laboratory testing, the motor manufacturer through "self-certifying" can apply the CE mark that its products are designed to the appropriate standards.
===
Frequency 50 Hz Frequency 60 Hz Poles Synchronous Full load (Typical) Synchronous Full load (Typical) 2 3,000 2,850 3,600 3,450 4 1,500 1,425 1,800 1,725 6 1,000 950 1,200 1,150 8 750 700 900 850
Speed, rpm
===
QUIZ:
1. What two factors determine the mechanical horse power output of a motor?
2. Explain what each of the following motor current ratings represents: (a) full-load amperes; (b) locked rotor current; (c) service factor amperes.
3. What does the code letter on the nameplate of a motor designate?
4. What NEMA design-type motor would be selected for driving a pump that requires a high starting torque at low starting current?
5. List four types of motor losses that affect the efficiency of a motor.
6. What motor specification defines the physical dimensions of a motor?
7. An imported machine motor rated for 50 Hz is operated at 60 Hz. What effect, if any, will this have on the speed of the motor? Why?
8. Would it be normally acceptable to replace a motor rated for NEMA A insulation with one rated for NEMA F insulation? Why?
9. Explain the basic load requirements for the following types of motor loads: (a) constant torque; (b) constant horsepower; (c) variable torque.
10. Explain what each of the following motor temperature ratings represents: (a) ambient temperature; (b) temperature rise; (c) hot spot temperature allowance.
11. What does the duty cycle rating of a motor refer to?
12. List the four types of torque associated with the operation of a motor.
13. What determines the type of motor enclosure selected for a particular application?
14. What type of motor enclosure would be best suited for extremely wet, dirty, or dusty areas?
15. Determine the equivalent NEMA horsepower rating for an 11 kW-rated metric motor.
Cont to part 7