AMAZON multi-meters discounts AMAZON oscilloscope discounts
1 Linear Synchronous Motors: Basic Geometries and Constructions • Classification • Flux Switching PM Linear Motors • Motors with Electromagnetic Excitation • Motors with Superconducting Excitation System
2 Linear Induction Motors: Basic Geometries and Constructions • Propulsion of Wheel-on-Rail Vehicles
3 Variable Reluctance Motors
4 Stepping Motors
5 Switched Reluctance Motors
6 Linear Positioning Stages
Linear electric motors belong to the group of special electrical machines that convert electrical energy directly into mechanical energy of translatory motion. Linear electric motors can drive a linear-motion load without intermediate gears, screws, or crank shafts. Linear electric motors can be classified as follows:
- • DC motors
- • Induction motors
- • Synchronous motors, including reluctance and stepping motors
- • Oscillating motors
- • Hybrid motors
The application of DC linear motor is marginal. The most popular are permanent magnet (PM) linear synchronous motors (LSMs) and linear induction motors (LIMs), which are manufactured commercially in several countries and are finding many applications.
A linear motor can be obtained by cutting a rotary motor along its radius from the center axis of the shaft to the external surface of the stator core and rolling it out flat ( FIG. 1).
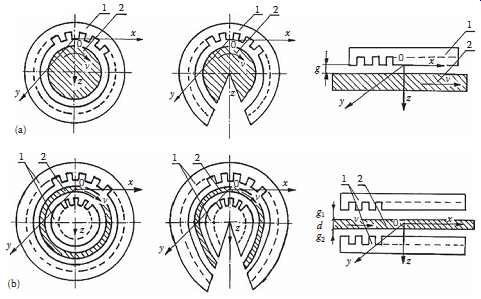
FIG. 1 Evolution of a rotary induction motor: (a) solid-rotor induction motor
into a flat, single-sided LIM and (b) hollow-rotor induction motor into a flat
double-sided LIM. 1, primary; 2, secondary.
1 Linear Synchronous Motors
1.1 Basic Geometries and Constructions
An LSM is a linear motor in which the mechanical motion is in synchronism with the magnetic field, i.e., the mechanical speed is the same as the speed of the traveling magnetic field. The thrust (propulsion force) can be generated as an action of
• Traveling magnetic field produced by a polyphase winding and an array of magnetic poles N, S, …, N, S or a variable reluctance ferromagnetic rail (LSMs with AC armature windings)
• Magnetic field produced by electronically switched DC windings and an array of magnetic poles N, S, …, N, S or variable reluctance ferromagnetic rail (linear stepping or switched reluctance motors)
The part producing the traveling magnetic field is called the armature or forcer. The part that provides the DC magnetic flux or variable reluctance is called the field excitation system (if the excitation system exists) or salient-pole rail, reaction rail, or variable reluctance platen. The terms primary and secondary should rather be avoided, as they are only justified for LIMs [6 ] or transformers. The operation of an LSM does not depend on which part is movable and which one is stationary.
Traditionally, AC polyphase synchronous motors are motors with DC electromagnetic excitation, the propulsion force of which has two components: (1) due to the traveling magnetic field and DC current magnetic flux (synchronous component) and (2) due to the traveling magnetic field and variable reluctance in d- and q-axes (reluctance component). Replacement of DC electromagnets with PMs is common, except for LSMs for magnetically levitated vehicles. PM brushless LSMs can be divided into two groups:
• PM LSMs in which the input current waveforms are sinusoidal and produce a traveling magnetic field
• PM DC linear brushless motors (LBMs) with position feedback, in which the input rectangular or trapezoidal current waveforms are precisely synchronized with the speed and position of the moving part
Construction of magnetic and electric circuits of LSMs belonging to both groups is the same. LSMs can be designed as flat motors ( FIG. 2) or tubular motors ( FIG. 3). In DC brushless motors, the information about the position of the moving part is usually provided by an absolute position sensor.
This control scheme corresponds to an electronic commutation, functionally equivalent to the mechanical commutation in DC commutator motors. Therefore, motors with square (trapezoidal) current wave forms are called DC brushless motors.
Instead of DC or PM excitation, the difference between the d- and q-axes reluctances and the traveling magnetic field can generate the reluctance component of the thrust. Such a motor is called the AC vari able reluctance LSM. Different reluctances in the d- and q-axes can be created by making salient ferro magnetic poles using ferromagnetic and non-ferromagnetic materials or using anisotropic ferromagnetic materials. The operation of LBMs can be regarded as a special case of the operation of LSMs.
In the case of LSMs operating on the principle of the traveling magnetic field, the speed v of the moving part is equal to synchronous speed vs
The synchronous speed vs of the traveling magnetic field depends only on the input frequency f (angular input frequency ? = 2pf ) and pole pitch t. It does not depend on the number of poles 2p.
As for any other linear-motion electrical machine, the useful force (thrust) Fx is directly proportional to the output power Pout
... and inversely proportional to the speed v = vs
FIG. 2 Flat three-phase PM linear motors. (Kollmorgen, Radford, VA.)

FIG.
3 Tubular PM LSM. Moving rod (reaction rail) contains circular PMs (California
Linear Drives, Carlsbad, CA.)
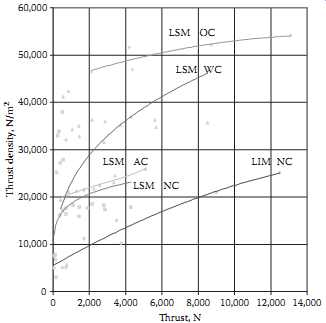
FIG. 4 Comparison of thrust density for single-sided LIMs and LSMs. AC, air
cooling; NC, natural cool ing; OC, oil cooling; WC, water cooling. (From Gieras,
J.F., Status of linear motors in the United States, International Symposium
on Linear Drives for Industry Applications (LDIA'03), Birmingham, U.K., pp.
169-176, 2003.)
Direct electromechanical drives with LSMs for factory automation systems can achieve speeds exceeding 600 m/min = 36 km/h and acceleration of up to 360 m/s^2. The thrust density, i.e., thrust per active surface 2ptLi , where Li is the effective width of the stack.
… of LSMs is higher than that of LIMs ( FIG. 4).
The polyphase (usually three-phase) armature winding can be distributed in slots, made in the form of concentrated-parameter coils or made as a coreless (air-cored) winding layer. PMs are the most popular field excitation systems for short traveling distances (less than 10 m), for example, factory transportation or automation systems. A long PM rail would be expensive. Electromagnetic excitation is used in high-speed passenger transportation systems operating on the principle of magnetic levitation (maglev). The German system, Transrapid, uses vehicle-mounted steel core excitation electromagnets and stationary slotted armatures. Japanese MLX001 test train sets use onboard superconducting (SC) air-cored electromagnets and a stationary three-phase air-cored armature winding distributed along the guide way (Yamanashi Maglev Test Line).
1.2 Classification
LSMs can be classified according to whether they are
• Flat (planar) or tubular (cylindrical)
• Single sided or double sided
• Slotted or slotless
• Iron cored or air cored
• Transverse flux or longitudinal flux The topologies mentioned earlier are possible for nearly all types of excitation systems. LSMs operating on the principle of the traveling magnetic field can have the following excitation systems:
• PMs in the reaction rail
• PMs in the armature (passive reaction rail)
• Electromagnetic excitation system (with winding)
• SC excitation system
• Passive reaction rail with saliency and neither PMs nor windings (variable reluctance motors) LSMs with electronically switched DC armature windings are designed either as linear stepping motors or linear switched reluctance motors.
1.2.1 PM Motors with Active Reaction Rail
FIG. 5a shows a single-sided flat LSM with the armature winding located in slots and surface PMs.
FIG. 5b shows a similar motor with buried-type PMs.
In surface arrangement of PMs, the yoke (back iron) of the reaction rail is ferromagnetic, and PMs are magnetized in the normal direction (perpendicular to the active surface). Buried PMs are magnetized in the direction of the traveling magnetic field, and the yoke is nonferromagnetic, For example, made of aluminum (Al). Otherwise, the bottom leakage flux would be greater than the linkage flux, as shown in FIG. 6. The same effect occurs in buried-type PM rotors of rotary machines in which the shaft must also be nonferromagnetic.
The so-called Halbach array of PMs also does not require any ferromagnetic yoke and excites stronger magnetic flux density and closer to the sinusoids than a conventional PM array. The key concept of the Halbach array is that the magnetization vector should rotate as a function of distance along the array ( FIG. 7).
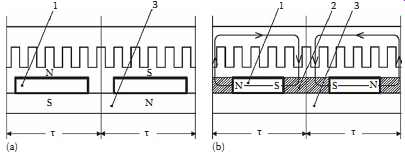
FIG.
5 Single-sided flat PM LSMs with slotted armature core and (a) surface PMs
and (b) buried PMs. 1, PM; 2, mild steel pole; 3, yoke.
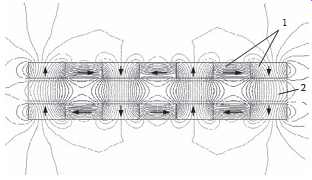
FIG. 6 Magnetic flux distribution in the longitudinal sections of buried-type
PM LSMs: (a) nonferromagnetic yoke and (b) ferromagnetic yoke (back iron).
FIG. 7 Double-sided LSM with Halbach array of PMs. 1, PMs; 2, coreless armature
winding.
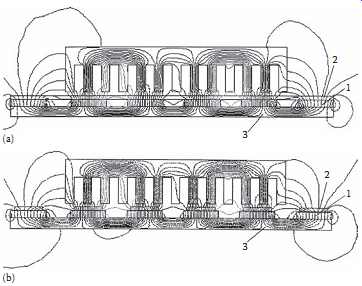
FIG. 8 Dampers of surface-type PM LSMs: (a) Al cover (shield) and (b) solid
steel pole shoes. 1, PM; 2, damper; 3, yoke.
It’s recommended that a PM LSM be furnished with a damper. A rotary synchronous motor has a cage damper winding embedded in pole shoe slots. When the speed is different from the synchronous speed, electric currents are induced in damper circuits. The action of the armature magnetic field and damper currents allows for asynchronous starting, damps the oscillations, and helps to return to synchronous operation when the speed decreases or increases. Also, a damper circuit reduces the backward-traveling magnetic field. It would be rather difficult to furnish PMs with a cage winding so that the damper of PM LSMs has the form of an Al cover ( FIG. 8a) or solid steel pole shoes ( FIG. 8b). In addition, steel pole shoes or Al cover (shield) can protect brittle PMs against mechanical damage.
The detent force, i.e., attractive force between PMs and the armature ferromagnetic teeth, force ripple, and some higher-space harmonics, can be reduced with the aid of skewed assembly of PMs. Skewed PMs can be arranged in one row (FIG. 9a), two rows ( FIG. 9b), or even more rows.
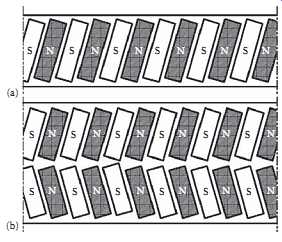
FIG. 9 Skewed PMs in flat LSMs: (a) one row and (b) two rows.
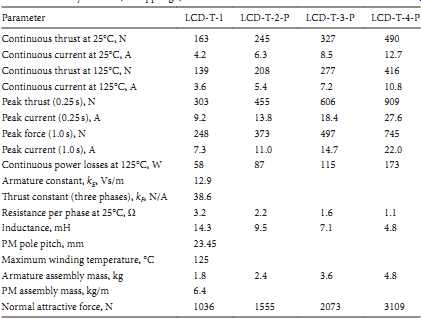
TABLE 1 Flat Three-Phase, Single-Sided PM LBMs with Natural Cooling Systems
Manufactured by Anorad, Hauppauge, NY
Specification data of flat, single-sided PM LBMs manufactured by Anorad are shown in TABLE 1, and motors manufactured by Kollmorgen are shown in TABLE 2. The temperature 25°C, 125°C, or 130°C for the thrust, current, resistance, and power loss is the temperature of the armature winding.
The electromotive force (EMF) constant kE in Tables 1 and 2 for sinusoidal operation is defined according to the equation expressing the EMF (induced voltage) excited by PMs without the armature reaction, i.e., where vs is the synchronous speed according to Equation 1. Thus, the armature constant kE multiplied by the synchronous speed vs gives the EMF Ef.
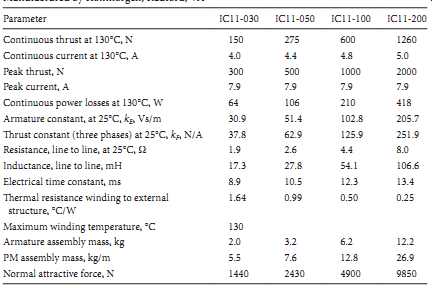
TABLE 2 Flat Three-Phase, Single-Sided PM LBMs with Natural Cooling Systems
Manufactured by Kollmorgen, Radford, VA
The thrust constant kF in Tables 1 and 2 is defined according to the simplified equation for the developed electromagnetic thrust, i.e.,
F k I dx F a = cos ?
for a sinusoidally excited LSM with equal reluctances in the d- and q-axes and for the angle between the armature current Ia and the q-axis ? = 0° (cos ? = 1). Thus, the thrust constant kF times the armature current Ia gives the electromagnetic thrust developed by the LSM.
Double-sided, flat PM LSMs consist of two external armature systems and one internal excitation sys tem ( FIG. 10a), or one internal armature system and two external excitation systems ( FIG. 10b). In the second case, a linear Gramme's armature winding can be used.
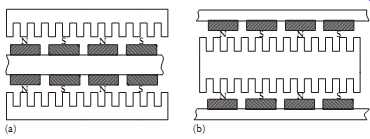
FIG. 10 Double-sided flat PM LSMs with (a) two external armature systems
and (b) one internal armature system.
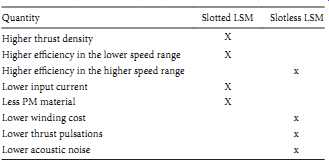
TABLE 3 Slotted versus Slotless LSMs Quantity Slotted LSM Slotless LSM Higher
thrust density X Higher efficiency in the lower speed range X Higher efficiency
in the higher speed range x Lower input current X Less PM material X Lower
winding cost x Lower thrust pulsations x Lower acoustic noise x
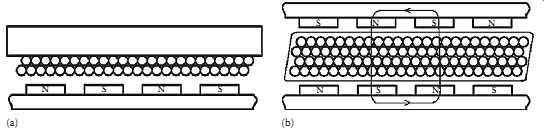
FIG. 11 Flat slotless PM LSMs: (a) single-sided with armature core and (b)
double-sided with inner air cored armature winding.
In slotless motors, the primary winding is uniformly distributed on a smooth armature core or does not have any armature core. Slotless PM LSMs are detent force-free motors, provide lower torque ripple, and, at high input frequency, can achieve higher efficiency than slotted LSMs. On the other hand, larger nonferromagnetic air gap requires more PM material, and the thrust density (thrust per mass or volume) is lower than that of slotted motors (TABLE 3). The input current is higher as synchronous reactances in the d- and q-axes can decrease to a low undesired value due to the absence of teeth. FIG. 11a shows a single-sided flat slotless motor with armature core, and FIG. 11b shows a double-sided slot less motor with inner air-cored armature winding (moving coil motor).
TABLE 4 contains performance specifications of double-sided PM LBMs with inner
three-phase air cored armature winding manufactured by Trilogy Systems Corporation,
Webster, TX ( FIG. 12).
TABLE 4 Flat Double-Sided PM LBMs with Inner Three-Phase Air-Cored Series-Coil Armature Winding Manufactured by Trilogy Systems Corporation, Webster, TX
By rolling a flat LSM around the axis parallel to the direction of the traveling magnetic field, i.e., parallel to the direction of thrust, a tubular (cylindrical) LSM can be obtained ( FIG. 13). A tubular PM LSM can also be designed as a double-sided motor or slotless motor.
Tubular single-sided LSMs LinMoT with movable internal PM excitation system (slider) and stationary external armature are manufactured by Sulzer Electronics AG, Zurich, Switzerland (TABLE 5). All active motor parts, bearings, position sensors, and electronics have been integrated into a rigid metal cylinder.
FIG. 12 Flat double-sided PM LSM with inner moving coil. (Trilogy Systems,
Webster, TX.)
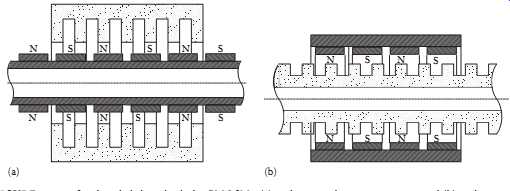
FIG. 13 Single-sided slotted tubular PM LSMs: (a) with external armature
system and (b) with external excitation system.
TABLE 5 Data of Tubular LSMs LinMot Manufactured by Sulzer Electronics AG, Zürich, Switzerland
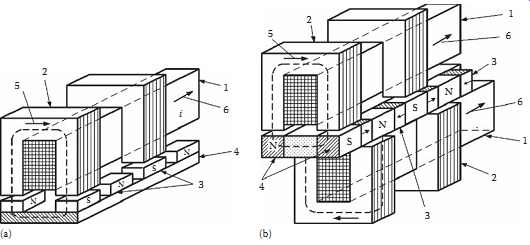
FIG. 14 Transverse flux PM LSM: (a) single-sided and (b) double-sided. 1,
armature winding; 2, armature laminated core; 3, PM; 4, back ferromagnetic
core; 5, magnetic flux; 6, armature current.
All the aforementioned PM LSMs are motors with longitudinal magnetic flux, the lines of which lie in the plane parallel to the direction of the traveling magnetic field. LSMs can also be designed as transverse magnetic flux motors, in which the lines of magnetic flux are perpendicular to the direction of the traveling field. FIG. 14a shows a single-sided transverse flux LSM in which PMs are arranged in two rows. A pair of parallel PMs creates a two pole flux excitation system. A double-sided configuration of transverse flux motor is possible; however, it’s complicated and expensive ( FIG. 14b).
1.2.2 PM Motors with Passive Reaction Rail
The drawback of PM LSMs is the large amount of PM material that must be used to design the excitation system. Normally, expensive rare-earth PMs are requested. If a small PM LSM uses, say, 10 kg of NdFeB per 1 m of the reaction rail, and 1 kg of good-quality NdFeB costs U.S.$ 130, the cost of the reaction rail without assembly amounts to U.S.$ 1300 per 1m. This price cannot be acceptable, For example, in passenger transportation systems.
A cheaper solution is to apply the PM excitation system to the short armature that magnetizes the long reaction rail and creates magnetic poles in it. Such a linear motor is called the homopolar LSM.
The homopolar LSM as described in is a double-sided AC linear motor that consists of two polyphase armature systems connected mechanically and magnetically by a ferromagnetic U-type yoke ( FIG. 15). Each armature consists of a typical slotted linear motor stack with polyphase armature winding and PMs located between the stack and U-type yoke. Since the armature and excitation systems are combined together, the armature stack is oversized as compared with a conventional steel-cored LSM. The PMs can also be replaced by electromagnets. The variable reluctance reaction rail is passive.
The saliency is created by using ferromagnetic (solid or laminated) cubes separated by a nonferromagnetic material. The reaction rail poles are magnetized by the armature PMs through the air gap. The traveling magnetic field of the polyphase armature winding and salient poles of the reaction rail produce the thrust. Such a homopolar LSM has been proposed for the propulsion of maglev trains of Swissmetro.
Further simplification of the double-sided configuration can be made to obtain a single-sided PM LSM shown in FIG. 16.
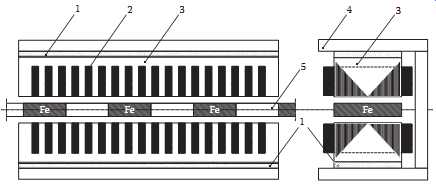
FIG. 15 Double-sided homopolar PM LSM with passive reaction rail. 1, PM;
2, armature winding; 3, armature stack; 4, yoke; 5, reaction rail.
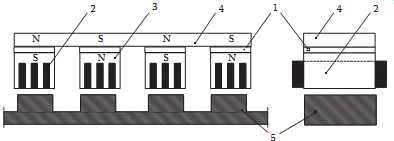
FIG. 16 Single-sided PM LSM with a passive reaction rail. 1, PM; 2, armature
winding; 3, armature stack; 4, yoke; 5, ferromagnetic reaction rail.
TABLE 6 Specifications of 1FN6 PM LSMs Manufactured by Siemens, Erlangen, Germany
1.3 Flux-Switching PM Linear Motors
Large gantry systems and machining centers require powerful linear motors, preferably with PM-free reaction rail. Siemens 1FN6 PM LSMs with a magnet-free reaction rail belong to the group of the so called flux-switching PM machines. The armature system is air cooled, degree of protection IP23, class of insulation F, line voltage from 400 to 480 V, rated thrust from 235 to 2110 N, maximum velocity at rated thrust from 170 to 540 m/min (TABLE 6), overload capacity 3.8 of rated thrust, modular type construction. These LSMs operate with Siemens Sinamics or Simodrive solid-state converters and external encoders. According to Siemens, these new LSMs produce thrust forces and velocities equivalent to competitive classical models for light-duty machine tool, machine accessory, and material handling applications.
The magnet-free reaction rail is easy to install and does not require the safety considerations of standard PM reaction rails. Without PMs, there is no problem with ferrous chips and other debris being attracted to these sections. Maintenance becomes a simple matter of installing a wiper or brush on the moving part of the slide.
The flux-switching LSM comprises an armature section that is equipped with coils and PMs as well as a nonmagnetic, toothed reaction rail section ( FIG. 17). The key design innovation is an LSM in which PMs are integrated directly into the lamination of the armature core along with the individual windings for each phase. Both magnitudes and polarities of the linkage flux in the armature winding vary periodically along with the reaction rail movement. The magnetic flux between the armature core and steel reaction rail is controlled by switching the three-phase armature currents according to a designated algorithm. The passive reaction rail consists of milled steel with poles (teeth) and is much simpler to manufacture.
1.4 Motors with Electromagnetic Excitation
The electromagnetic excitation system of an LSM is similar to the salient-pole rotor of a rotary synchronous motor. FIG. 18 shows a flat single-sided LSM with salient ferromagnetic poles and DC field excitation winding. The poles and pole shoes can be made of solid steel, laminated steel, or sintered powder. If the electromagnetic excitation system is integrated with the moving part, the DC cur rent can be delivered with the aid of brushes and contact bars, inductive power transfer (IPT) systems, linear transformers, or linear brushless exciters.
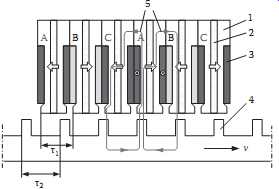
FIG. 17 Construction of flux-switching LSM with PM-free reaction rail. 1,
laminated armature core; 2, PM; 3, armature coil (phase C); 4, toothed passive
steel reaction rail; 5, linkage magnetic flux (phase A is on).
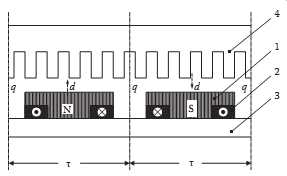
FIG. 18 Electromagnetic excitation system of a flat single-sided iron-cored
LSM. 1, salient pole; 2, DC excitation winding; 3, ferromagnetic rail (yoke);
4, armature system.

FIG. 19 Transrapid 09 maglev train driven by LSMs with electromagnetic excitation.
(Thyssen Transrapid System GmbH, Munich, Germany.)
FIG. 21 YMTL in Yamanashi Prefecture (near Tokyo), Japan. YMTL maglev trains
use air-cored LSMs with SC excitation system. (Central Japan Railway Company
and Railway Technical Research Institute, Tokyo, Japan.)
LSMs with electromagnetic excitation (wound-field reaction rail) are used in German Transrapid maglev train ( FIG. 19).
1.5 Motors with Superconducting Excitation System
In large-power LSMs, the electromagnets with ferromagnetic core that produce the excitation flux can be replaced by coreless SC electromagnets. Since the magnetic flux density produced by the SC electro magnet is greater than the saturation magnetic flux density of the best laminated alloys (Bsat ˜ 2.4 T for cobalt alloy), there is no need to use the armature ferromagnetic core. An LSM with SC field excitation system is a totally air-cored machine ( FIG. 20).
Experimental maglev trains on the Yamanashi Maglev Test Line (YMTL) in Yamanashi Prefecture (west from Tokyo), Japan, are driven by air-cored LSMs with SC excitation systems ( FIG. 21).
2 Linear Induction Motors
LIMs have found the widest prospects for applications in transportation systems, beginning with electrical traction on small passenger or material supply cars (used at airports, exhibitions, electrohighways, elevators) and ending with pallet transportation, wafer transportation, belt conveyors, transportation systems of bulk materials, etc. The second important place for LIM applications is in industry, i.e., manufacturing processes (machine tools, hammers, presses, mills, separators, automated manufacturing systems, strip tensioners, textile shuttles, index tables, turntables, disk saws for wood, sliding doors, robots, etc.).
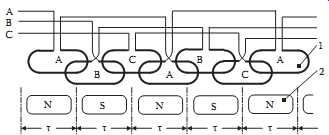
FIG. 20 Three-phase air-cored LSM with SC excitation system. 1, armature
coils; 2, SC excitation coils.
LIMs can also play an important part in industrial investigations and tests, for example, high acceleration of model aircraft in aerodynamic tunnels; high acceleration of vessels in laboratory pools; propulsion of mixers, shakers, and vibrators; and adjusting x-y tables and instruments. There is also a possibility of using LIMs in consumer electronics (sound and vision equipment, knitting machines, curtains) and in offices (transportation of documents, letters, and cash). The Hand book of Linear Motor Applications printed in Japan in 1986 contains about 50 examples of applications of LIMs in operation or in the process of implementation.
FIG. 22 The primary of a flat LIM with two DOFs.
2.1 Basic Geometries and Constructions
A LIM can be obtained by cutting in the same way either a cage rotor induction motor or a wound rotor induction motor. The stator becomes the primary, and the rotor becomes the secondary. The secondary of a LIM can be simplified by using a solid steel core and replacing the cage (ladder) or slip-ring winding with a high-conductivity nonferromagnetic plate (Al or Cu). The nonferromagnetic plate is a secondary electric circuit with distributed parameters, and the ferromagnetic core is a conductor both for the magnetic flux and the electric current. It does not matter from the principle of operation point of view which part (primary or secondary) is in motion. Thus, the flat, single-sided LIM can be obtained from a solid rotor induction motor ( FIG. 1a) and the flat, double-sided LIM can be obtained from a hollow-rotor induction motor with wound external and internal stator ( FIG. 1b). In a double-sided LIM, the secondary ferromagnetic core is not necessary, since the magnetic flux excited by one of the primary windings after passing through the air gaps and nonferromagnetic secondary is then closed up by the core of the second primary unit.
Theoretically, a double-sided LIM with primary windings located on two cores, in comparison with a single-sided LIM exciting the same MMF, has twice the air gap magnetic flux density. Therefore, the thrust of such a motor is four times greater, assuming the same dimensions. If only one primary core is wound, the output parameters of a double-sided LIM are the same as those for a single-sided LIM with laminated secondary back iron. The fundamental advantage of double-sided LIMs is the elimination of the normal attractive force between the primary and the secondary because the secondary is usually nonferromagnetic.
Flat LIMs can have primary cores consisting of an array of cores arranged in parallel at appropriate distances and connected magnetically by additional yokes perpendicular to the direction of the traveling field. A magnetic circuit designed in such a way makes it possible to apply two windings, in general multiphase windings, with perpendicular conductors, as shown in FIG. 22. Adjusting the current in each winding, the secondary can be moved in two perpendicular directions and can be positioned at any point of the x-y plane. A flat LIM with two degrees of freedom (DOFs) can be designed both as single-sided and double-sided machines.
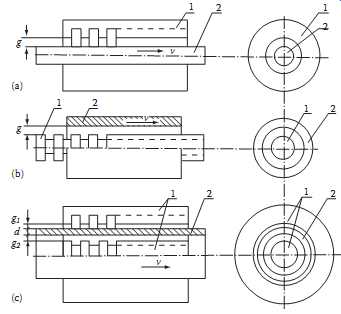
FIG. 23 Tubular LIMs: (a) single-sided with an external short primary, (b)
single-sided with an external short secondary, and (c) double-sided with short
primary. 1, primary; 2, secondary.
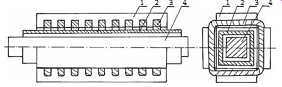
FIG. 24 Tubular, double-sided LIM with a square cross section: 1, primary;
2, secondary; 3, primary coil; 4, internal core.
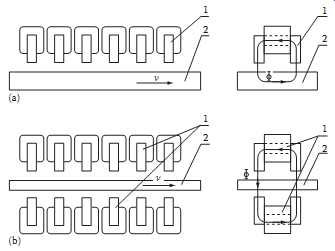
FIG. 25 Flat LIM with transverse magnetic flux and salient poles: (a) single-sided
and (b) double-sided. 1, primary; 2, secondary.
By rolling a flat, single-sided or double-sided LIM around the axis parallel to the direction of the traveling magnetic field, i.e., parallel to the direction of the thrust, a tubular motor can be obtained ( FIG. 23).
A tubular (cylindrical) LIM, similar to a flat LIM, can be designed both as single-sided and double sided machines and can have a square or rectangular cross section, as in FIG. 24. There are possible configurations other than that in FIG. 23, regarding the length of the secondary with respect to the length of the primary.
All the aforementioned LIMs are motors with longitudinal magnetic flux, i.e., the lines of magnetic flux lie in the plane parallel to the direction of the traveling magnetic field. A LIM can also be designed in such a way as to obtain magnetic flux lines perpendicular to the direction of the traveling field. Such motors are said to have transverse magnetic flux ( FIG. 25).
The fundamental advantage of a LIM with transverse magnetic flux in comparison with a LIM with longitudinal magnetic flux is the lower magnetizing current necessary due to the shorter magnetic flux paths. The significant disadvantage is lower thrust. A flat LIM with transverse magnetic flux usually has a primary winding of concentrated coils located on salient poles.
A flat, single-sided LIM with transverse flux can produce not only thrust but also electrodynamic suspension. In the design shown in FIG. 26, the secondary is suspended electrodynamically and propelled and stabilized laterally by the primary magnetic field. The primary magnetic circuit consists of E-shaped laminations assembled in two rows. The short secondary is made of light Al alloy in the form of a boat. The lateral sides of the boat are inclined by 60° with respect to the active surface. Such a shape provides maximum normal repulsive force and maximum lateral stabilization.
According to their geometry, the LIMs can be divided into the following groups:
• With movable primary or movable secondary
• Single sided and double sided
• Flat and tubular
• With short primary and short secondary
• With longitudinal and transverse magnetic flux

FIG. 26 Flat LIM with transverse magnetic flux, salient poles, and nonferromagnetic
secondary propelled, suspended, and stabilized electrodynamically. (From Gieras,
J.F. et al., Analytical calculation of electro dynamic levitation forces in
a special-purpose linear induction motor, International Electric Machines and
Drives Conference (IEMDC'11), Niagara Falls, Ontario, Canada, 2011 [on CD-ROM
].)
The linear speed of a LIM is …
… is the synchronous speed according to Equation 1 Neglecting the longitudinal end effect [6 ], the electromagnetic thrust developed by a LIM can be expressed in a similar way as for a rotary induction motor, i.e., where …
… m1 is the number of phases of the primary winding vs is the synchronous speed according to Equation 1
' I2 is the secondary current referred to the primary system
' R2 is the secondary resistance referred to the primary system s is the slip
The secondary resistance ' R2 must include the so-called edge effect.
2.2 Propulsion of Wheel-on-Rail Vehicles
Modern railway systems and electrical traction should meet the following requirements:
• High level of automatization and computerization
• Propulsion and braking independent of adhesion which in turn is affected, first of all, by climate and weather
• Low level of noise, sometimes below 70 dB (A)
• Ability to cope with high slopes, at least 6%, and sharp bends with radius of curvature less than 20 m
• No pollution to natural environment and landscape
• High reliability
The congestion problems of big cities should be solved by creating collective transport forms that can be implemented without affecting a highly populated city. For example, there are many cities in Italy where the historical center has remained the same since the Renaissance. A heavy railway might be a completely wrong solution and have a notable impact on the city planning. An adequate solution might be a light railway, a people mover, with transport capacity of 10,000-20,000 passengers per hour, to replace the traditional transport nets and to integrate the existing railway nets.
All the requirements mentioned earlier can be met by using LIMs as propulsion machines. Replacing electrical rotary motors with linear motors in traction drives (electrical locomotives) generally does not require new tracks but only their adjustment to linear drives. Single-sided LIMs ( FIG. 27a and b) are best, since the normal attractive force of these can strengthen the adhesion of wheels and rails.
The air gap is from 10 to 15 mm. Most frequently, the motor car has two LIMs with short primaries ( FIG. 27a) assembled in series. The double-layer secondary consists of a solid back iron and an Al cap and is located between the rails. Cables for computer communication with the vehicle and, quite often, collectors for electrical energy delivery to the vehicle are located along the track. Three-phase LIMs are fed from variable-voltage, variable-frequency (VVVF) voltage-source inverters. A linear propulsion system of wheel-on-rail vehicles allows more flexibility ( FIG. 28), reducing noise on bends and wear of the wheels and rails.
Double-sided LIMs ( FIG. 27c and d) have found very limited application due to the technical difficulty of eliminating faults caused by bends in the secondary with primary cores on either side. It’s more difficult to keep a small and uniform air gap in double-sided LIMs than that in single-sided LIMs.
The LIM-driven wheel-on-rail vehicles are built for low velocities, i.e., less than 100 km/h, and for short routes, i.e., less than 50 km (urban transit systems and short-distance trains). At present, LIM driven trains operate in Toronto and Vancouver, BC, Canada; in Detroit, MI ( FIG. 29); Tokyo ( FIG. 30) and Osaka, Japan; and Kuala Lumpur, Malaysia.
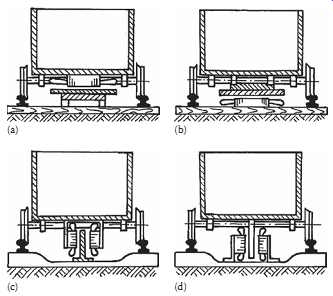
FIG. 27 LIM-driven wheel-on-rail cars: (a) single-sided LIM with short primary
mounted on the undercarriage, (b) single-sided LIM with short secondary mounted
on the undercarriage, (c) double-sided LIM with short primary mounted on the
undercarriage, and (d) double-sided LIM with short secondary mounted on the
undercarriage.
FIG. 28 The undercarriage of a wheel-on-rail vehicle: (a) rotary motor propulsion
and (b) LIM propulsion.

FIG. 29 Detroit people mover driven by single-sided LIMs.

FIG. 30 Toei Oedo subway line in Tokyo driven by single-sided LIMs.
TABLE 7 Design Data of Single-Sided, Three-Phase LIMs for Propulsion of Vehicles
The design data of some single-sided traction LIMs are presented in TABLE 7 and double-sided traction LIMs in TABLE 8.
3 Variable Reluctance Motors
The simplest construction of a variable reluctance LSM or linear reluctance motor (LRM) is that shown in FIG. 18 with DC excitation winding being removed. However, the thrust of such a motor would be low as the ratio of d-axis permeance to q-axis permeance is low. Better performance can be obtained when using flux barriers or steel laminations. To make flux barriers, any nonferromagnetic materials can be used. To obtain high permeance (low reluctance) in the d-axis and low permeance in the q-axis, steel laminations should be oriented in such a way as to create high permeance for the d-axis magnetic flux.
FIG. 31a shows a variable reluctance platen with flux barriers, and FIG. 31b shows how to arrange steel laminations to obtain different reluctances in the d- and q-axes. The platen can be com posed of segments, the length of which is equal to the pole pitch t. Each segment consists of semicircular lamellas cut out from electrotechnical sheet. A filling, for example, epoxy resin, is used to make the segment rigid and robust. By putting the segments together, a platen of any desired length can be obtained.
TABLE 8 Design Data of Double-Sided, Three-Phase LIMs for Propulsion of Vehicles
4 Stepping Motors
A linear stepping motor has a concentrated armature winding wound on salient poles and PM excitation rail or variable reluctance platen. The thrust is generated as an action of the armature magnetic flux and PM flux (active platen), or the armature magnetic flux and salient ferromagnetic poles (variable reluctance platen). Stepping motors have no position feedback.
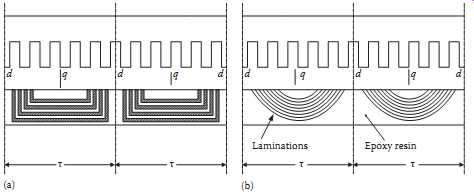
FIG. 31 Variable reluctance LSMs with (a) flux barriers and (b) steel laminations.
So far, only stepping linear motors of hybrid construction (PM, winding and variable reluctance air gap) have found practical applications.
The hybrid linear stepping motor (HLSM), as shown in FIG. 32, consists of two parts: the forcer (also called the slider) and the variable reluctance platen. Both of them are evenly toothed and made of high-permeability steel. This is an early design of the HLSM, the so-called Sawyer linear motor. The forcer is the moving part with two rare-earth magnets and two concentrated-parameter windings. The tooth pitch of the forcer matches the tooth pitch on the platen. However, the tooth pitches on the forcer poles are spaced 1/4 or 1/2 pitch from one pole to the next. This arrangement allows for the PM flux to be controlled at any level between minimum and maximum by the winding so that the forcer and the platen line up at a maximum permeance position. The HLSM is fed with two-phase currents (90° out of phase), similarly as a rotary stepping motor. The forcer moves 1/4 tooth pitch per each full step.
There is a very small air gap between the two parts that is maintained by strong air flow produced by an air compressor. The average air pressure is about 300-400 kPa and depends on how many phases are excited.
TABLE 9 shows specification data of HLSMs ( FIG. 33) manufactured by Tokyo Aircraft Instrument Co., Ltd., Tokyo, Japan. The holding force is the amount of external force required to break the forcer away from its rest position at rated current applied to the motor. The step-to-step accuracy is a measure of the maximum deviation from the true position in the length of each step.
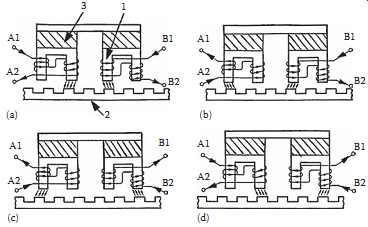
FIG. 32 Principle of operation of an HLSM: (a) initial position, (b) 1/4
tooth pitch displacement of the forcer, (c) 2/4 tooth pitch displacement, and
(d) 3/4 tooth pitch displacement. 1, forcer; 2, platen; 3, PM.
TABLE 9 Data of HLSMs Manufactured by Tokyo Aircraft Instrument Co., Ltd., Tokyo, Japan
This value is different for full-step and microstepping drives. The maximum start-stop speed is the maximum speed that can be used when starting or stopping the motor without ramping that does not cause the motor to fall out of synchronism or lose steps. The maximum speed is the maximum linear speed that can be achieved without the motor stalling or falling out of synchronism. The maximum load mass is the maximum allowable mass applied to the forcer against the scale that does not result in mechanical damage. The full-step resolution is the position increment obtained when the currents are switched from one winding to the next winding. This is the typical resolution obtained with full-step drives, and it’s strictly a function of the motor construction. The microstepping resolution is the position increment obtained when the full-step resolution is divided electronically by proportioning the currents in the two windings. This resolution is typically 10-250 times smaller than the full-step resolution.
HLSMs are regarded as an excellent solution to positioning systems that require a high accuracy and rapid acceleration. With a microprocessor controlled microstepping mode, a smooth operation with standard resolution of a few hundred steps/mm can be obtained. The advantages such as high efficiency, high throughput, mechanical simplicity, high reliability, precise open-loop operation, and low inertia of the system have made these kind of motors more and more attractive in such applications as factory automation, high speed positioning, computer peripherals, facsimile machines, numerically controlled machine tools, automated medical equipment, automated laboratory equipment, and welding robots.
This motor is especially suitable for machine tools, printers, plotters, and computer-controlled material handling in which a high positioning accuracy and repeatability are the key problems.
When two or four forcers mounted at 90° and a special grooved platen ("waffle plate") are used, the x-y motion (two DOFs) in a single plane is obtained ( FIG. 34).
Specification data of the x-y HLSMs manufactured by Normag Northern Magnetics, Inc., Santa Clarita, CA, are given in TABLE 10.
FIG. 33 PM linear stepping motors. (Tokyo Aircraft Instrument, Co., Ltd.,
Tokyo, Japan.)
5 Switched Reluctance Motors
The topology of a linear switched reluctance motor is similar to that of a stepping motor with variable reluctance platen. In addition, it’s equipped with position sensors. The turn-on and turn-off instant of the input current is synchronized with the position of the moving part. The thrust is very sensitive to the turn-on and turn-off instant.
In the case of a linear stepping or linear switched reluctance motor, the speed v of the moving part is
…fsw is the fundamental switching frequency in one armature phase winding t is the pole pitch of the reaction rail
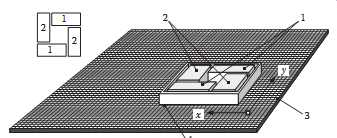
FIG. 34 HLSM with a four-unit forcer to obtain the x-y motion: 1, forcers
for the x-direction; 2, forcers for the y-direction; 3, platen; 4, air pressure.
TABLE 10 Data of x-y HLSMs Manufactured by Normag Northern Magnetics, Inc., Santa Clarita, CA
For a rotary stepping or switched reluctance motor, fsw = 2prn, where 2pr is the number of rotor poles and n is rotational speed in rev/s.
A linear switched reluctance motor has a doubly salient magnetic circuit with a polyphase winding on the armature. Longitudinal and transverse flux designs are shown in FIG. 35. A linear switched reluctance motor allows precise speed and position-controlled linear motion at low speeds and is not subject to design constraints (minimum speed limited by minimum feasible pole pitch) of linear AC motors.
6 Linear Positioning Stages
Linear motors are now playing a key role in advanced precision linear positioning. Linear precision positioning systems can be classified into open-loop systems with HLSMs and closed-loop servo systems with LSMs, LBMs, or LIMs.
A PM LSM-driven positioning stage is shown in FIG. 36. A stationary base is made of Al, steel, ceramic, or granite plate. It provides a stable, precise, and flat platform to which all stationary positioning components are attached. The base of the stage is attached to the host system with the aid of mounting screws.
The moving table accommodates all moving positioning components. To achieve maximum acceleration, the mass of the moving table should be as small as possible, and usually, Al is used as a lightweight material. A number of mounting holes on the moving table is necessary to fix the payload to the mounting table.
Linear bearing rails provide a precise guidance to the moving table. A minimum of one bearing rail is required. Linear ball bearing or air bearings are attached to each rail.
The armature of a linear motor is fastened to the moving table, and reaction rail (PM excitation sys tem) is built in the base between the rails ( FIG. 36).
A linear encoder is needed to obtain precise control of position of the table, velocity, and acceleration.
The read head of the encoder is attached to the moving table.
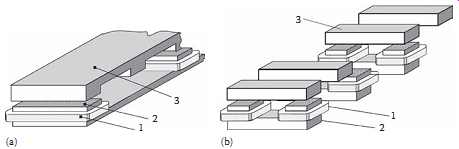
FIG. 35 Linear switched reluctance motor configurations: (a) longitudinal
flux design and (b) transverse flux design. 1, armature winding; 2, armature
stack; 3, platen.
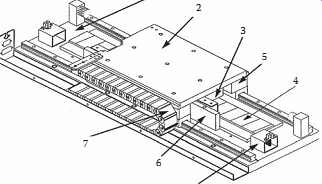
FIG. 36 Linear positioning stage driven by PM LBM. 1, base; 2, moving table;
3, armature of LBM; 4, PMs; 5, linear bearing; 6, encoder; 7, cable carrier;
8, limit switch. (Normag, Santa Clarita, CA.)
Noncontact limit switches fixed to the base provide an overtravel protection and initial homing.
A cable carrier accommodates and routes electrical cables between the moving table and stationary connector box fixed to the base.
An HLSM-driven linear precision stage is of similar construction. Instead of PMs between bearing rails, it has a variable reluctance platen. HLSMs usually need air bearings, and, in addition to the electrical cables, an air hose between air bearings and the compressor is required.
Linear positioning stages are used in semiconductor technology, electronic assembly, quality assurance, laser cutting, optical scanning, water jet cutting, gantry systems (x, y, z stages), color printers, plotters, and Cartesian coordinate robotics.