AMAZON multi-meters discounts AMAZON oscilloscope discounts
During the 1970s, studies were carried out by accident investigators and regulatory authorities to examine one of the most significant causes of aircraft accidents of the time: controlled flight into terrain (CFIT). This can be defined as an accident where a service able aircraft, under the control of a qualified pilot, inadvertently flies into terrain, an obstacle or water.
CFIT accidents usually occur during poor visual conditions, often influenced by other factors, e.g. flight crew distraction, malfunctioning equipment or air traffic control (ATC) miscommunication. With CFIT, the pilots are generally unaware of this situation until it is too late. The outcome of these investigations was that many CFIT accidents could be avoided with a ground proximity warning system (GPWS). A system was developed in 1967 to alert pilots that their aircraft was in immediate danger of CFIT. This system was further developed into the enhanced ground proximity warning system (EGPWS) by adding a forward looking terrain avoidance (FLTA) feature, made possible via global positioning system technology. This section describes the generic name given to this type of protection: terrain awareness warning system (TAWS).
=========
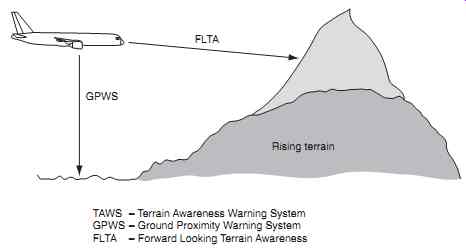
FIG. 1 TAWS overview
GPWS FLTA Rising terrain TAWS - Terrain Awareness Warning System; GPWS - Ground Proximity Warning System; FLTA - Forward Looking Terrain Awareness
==========
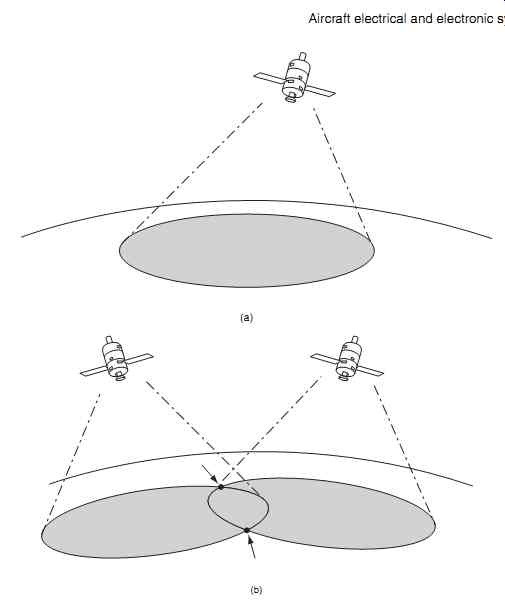
FIG. 2 GPS principles: (a) Single satellite describes a circle on the earth's
surface, (b) Two satellites define two unique positions
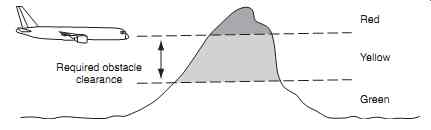
FIG. 3 Obstacle clearance/color coding
1. System overview
The terrain awareness warning system comprises air craft sensors, a computing function and warning out puts. The computer receives numerous inputs from on-board sensors and processes these to determine if a hazardous situation is developing. The TAWS computing function can either be from a self-contained unit; alternatively, it can integrated within another aircraft system.
Early ground proximity warning systems were based on aircraft sensors that detected:
-- barometric altitude
-- vertical speed
-- radio altitude
These early systems warned the crew of excessive descent rates or if they were flying towards rising terrain. TAWS can be considered as a ground proximity warning system (GPWS) combined with forward-looking terrain avoidance (FLTA), see FIG. 1. The combined systems provide a significant increase in safety margins by combining accurate position information (via the GPS) together with a terrain database.
GPS is an artificial constellation of navigation aids that was initiated in 1973 and referred to as Navstar (navigation system with timing and ranging). The global positioning system was developed for use by the US military; the first satellite was launched in 1978 and the full constellation was in place and operating by 1994. GPS is now widely available for use in many applications including aircraft navigation; the system calculates the aircraft position by triangulating the distances from a number of satellites, see FIG. 2.
Three satellites are required for the receiver to calculate a unique lateral position; a fourth satellite pro vides altitude, i.e. a three-dimensional position.
The availability of GPS technology thereby pro vides forward-looking terrain avoidance (FLTA) capability; it can look ahead of and below the aircraft flight path. This can be depicted on a display that is color-coded (FIG. 3) to show the required obstacle clearance:
-- red is used to indicate terrain above the aircraft's current altitude
-- yellow is dependent on the flight phase, i.e. en route, terminal areas or approach
-- green areas on the display are safe in terms of required terrain clearance
The TAWS computer function creates a four dimensional position comprising: latitude, longitude, altitude and time. It compares this position with the on-board database that contains details of terrain, obstacles and runways to determine any conflicts.
(More information on GPS is provided in a related book in the series, Aircraft Communications and Navigation Systems.)
Key point
TAWS can be considered as a ground proximity warning system (GPWS) combined with forward looking terrain avoidance (FLTA).
2. System warnings and protection
Cautions and warnings are provided to the crew depending on the level of CFIT threat; these include visual indications and audible announcements. TAWS equipment is designed to provide the flight crew with adequate time to take appropriate action. Equipment is classified either as Class A or B depending on the level of protection that the system provides.
In general terms, passenger carrying aircraft require TAWS-A, smaller aircraft require TAWS-B ; see
Tables 1 and 2 for a summary of features.
=====================
Table 1 TAWS: features, purpose and application (Class A or Class B)
Feature Purpose A B
Forward-looking terrain avoidance (FLTA)
The system looks ahead of and below the aircraft's lateral and vertical flight path to provide a suitable alert if a potential threat exists. FLTA sub-functions are detailed below
FLTA reduced required terrain clearance alerts
Generated when the aircraft is currently above the terrain of the projected flight path of the aircraft and terrain clearance ahead of the aircraft is considered unsafe
FLTA imminent terrain impact alert
Generated when the aircraft is currently below the elevation of local terrain along the lateral flight path and when the projected vertical flight path is considered unsafe
FLTA high terrain impact alert
Generated when the terrain ahead of the aircraft is higher than the projected vertical path
FLTA flight path intent advisory alerts
Generated when the terrain ahead of the aircraft conflicts with the flight plan
Premature descent alert
The system compares the aircraft's current lateral and vertical position with the proximity of the nearest airport. Predicted flight path information and details from the database are used to determine if the aircraft is below the normal approach path for the nearest runway
Attention alerts
The system provides appropriate visual and audio alerts for both cautions and warnings
Terrain awareness display
The system provides terrain information to a suitable display system, e.g. a multi-function display (MFD)
===================
Table 2 TAWS ground proximity warning Modes (Class A and Class B)
Mode Description A B
1 Excessive descent rate
2 Excessive terrain closure rate
3 Negative climb rate or altitude loss after take-off
4 Flight into terrain when not in landing configuration
5 Excessive downward deviation from an ILS glide slope
6 Altitude callout at 500 feet
7 Wind shear
====================
Cautionary alerts are given by TAWS that require immediate crew awareness; subsequent corrective action will normally be necessary. Warning alerts are given for a terrain threat that requires immediate crew action. Aural alerts are synthesized voice messages that are produced through the audio panel into crew headsets and through the flight compartment speakers. Messages are presented on a suitable electronic display in text format, typically on a multi-function or other navigation display. Electronic navigation displays provide situational awareness, i.e. direction of flight and the location of nearby airports (given as four letter codes). Local terrain features can be overlaid onto this presentation. Messages are either red or amber, depending on the threat level. Master caution and GPWS lights are illuminated depending on the threat level.
=========
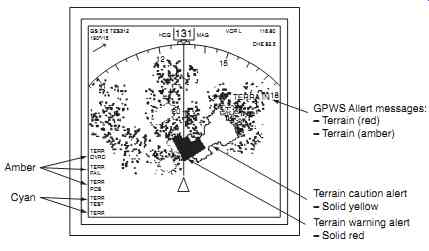
FIG. 4 MFD/navigation display
GPWS Alert messages:
- Terrain (red)
- Terrain (amber) Terrain caution alert
- Solid yellow Terrain warning alert
- Solid red Amber
==========
We have seen from the above that TAWS can be considered as a ground proximity warning system (GPWS) and forward-looking terrain avoidance (FLTA). Forward-looking terrain avoidance produces alerts from obstacles ahead of the aircraft using a terrain data base, GPS position and other reference data, e.g. aircraft speed etc. The ground proximity warning system produces alerts from the terrain below the aircraft and configuration inputs, e.g. gear and flap settings during approach and landing. FLTA features in Class A and B TAWS are identical and provide the same level of safety for the aircraft. The primary differences between Class A and B TAWS are in the GPWS features and terrain awareness display. Class A TAWS can be considered as being autonomous, i.e. all the aircraft reference inputs are from independent sources. Class B TAWS derives much of its references from within the TAWS computer (or TAWS section of another computer). In summary, the following sensor inputs and displays are required by Class A TAWS, but not Class B:
-- radar altitude
-- air data
-- gear position
-- map display
A terrain awareness display is only required for Class-A TAWS, although the display is found in many Class-B installations as an option. The graphical display of terrain relative to the aircraft position and projected flight path is a major enhancement to situational awareness. Terrain can be displayed on general purpose multi-function displays (MFD) or on a navigation display (ND), see FIG. 4. Color coding and intensity are used to depict terrain relative to the aircraft.
Displays can be either a profile view or plan view.
In addition to the terrain map, text messages are produced depending on system status and the terrain awareness threat level. When integrated with an electronic display, the surrounding terrain can be viewed relative to the aircraft position; this provides strategic terrain information up to 30 minutes in advance of a potential terrain conflict.
Test your understanding 1
Define the meaning of CFIT.
Key point
A terrain awareness display is only required for Class-A TAWS.
The two classes of TAWS are aimed at different types of aircraft; in broad terms Class A is intended for larger passenger aircraft, Class B is for general aviation aircraft. By deriving critical parameters such as synthetic radar altitude, the cost of Class B TAWS is substantially reduced in terms of both equipment and certification costs.
3. External references
The ground proximity Modes are derived from a number of signal inputs to the computer; each input is received from a variety of aircraft system outputs including:
-- barometric air data
-- radio altitude
-- instrument landing system
-- attitude and heading reference system
The source of these inputs to the computer will vary depending on aircraft type.
Barometric air data includes altitude and vertical rate, or vertical speed. These two parameters are usually derived from an air data computer (ADC). This computer combines the functions of individual instruments, and can be used to determine data from the aircraft's pitot-static system:
-- altitude
-- vertical rate, or speed
-- calibrated airspeed
-- mach number
Air data computers usually have an input of total air temperature to enable computation of static air temperature and true airspeed.
=============
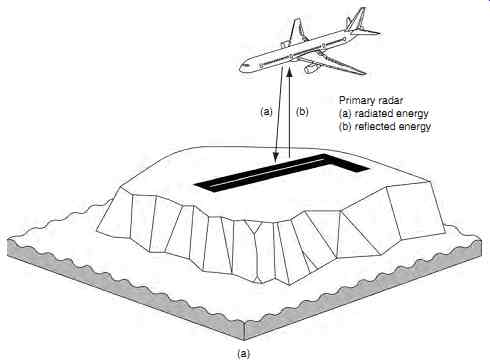
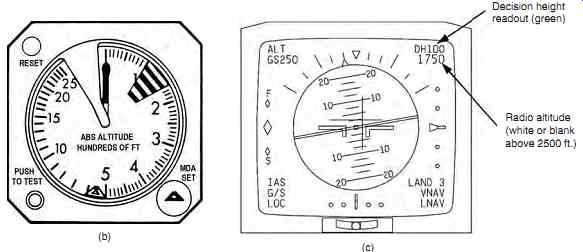
FIG. 5 Low-range radio altimeter: (a) principle of operation, (b) analogue
indication, (c) electronic indication
Decision height readout (green); adio altitude (white or blank above 2500 ft.)
==============
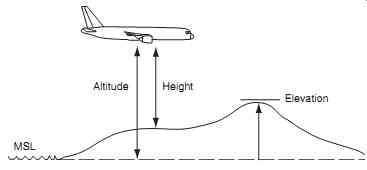
FIG. 6 Elevation, altitude and height
MSL; Altitude; Height; Elevation
===============
FIG. 7 Instrument landing system
Runway (a) Final approach Runway (b) Glide slope Vertical guidance Runway (c) Localizer Horizontal guidance
=============
The low-range radio altimeter (LRRA) is a self contained vertically directed primary radar system operating in the 4.2 to 4.4 GHz band. Airborne equipment comprises a combined transmitting and receiving antenna, LRRA transmitter/receiver and a flight deck indicator. Most aircraft are fitted with two independent systems. Radar energy is directed via a transmitting antenna to the ground (FIG. 5(a)); some of this energy is reflected back from the ground and is collected in the receiving antenna. This is displayed to the crew on an dedicated display (FIG. 5(b)) or an electronic instrument ( FIG. 5(c)).
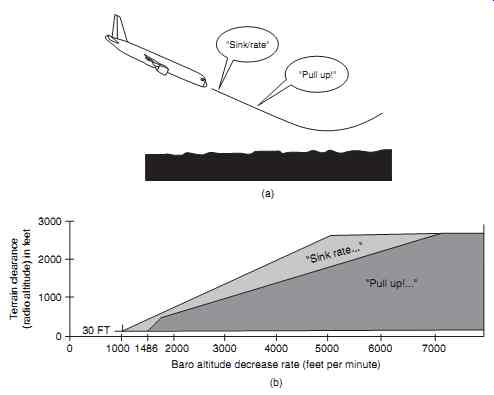
FIG. 8 GPWS Mode 1: (a) excessive descent rate profile, (b) excessive descent
rate envelope
For aircraft operations, and in particular for TAWS, it is important to differentiate between elevation, altitude and height. Referring to FIG. 6, the basic reference point is mean sea level (MSL). Terrain that rises above MSL is measured as elevation. The aircraft's altitude is measured (normally in feet) above MSL, whereas the aircraft's height is measured above the terrain.
The instrument landing system is used during the final approach and is based on directional beams propagated from two transmitters at the airfield; see FIG. 7. One transmitter (the localizer) guides the aircraft in the horizontal plane. The second transmitter (the glide slope) provides guidance in the vertical plane and has a range of approximately 10 nm.
The attitude of an aircraft (pitch and roll) is sensed by gyroscopes. These sensors provide reference outputs that are processed to develop navigation and attitude data. Larger passenger aircraft derive this data from an inertial reference system (IRS). Developments in micro-electromechanical systems (MEMS) technology have led to silicon accelerometers that are more reliable and can be manufactured onto an integrated circuit. MEMS is the integration of mechanical elements, sensors and electronics on a common silicon substrate through micro-fabrication technology. This technology is being introduced onto general aviation aircraft for attitude and heading reference systems (AHRS). These systems are described in more detail in Aircraft Navigation and Communication Systems.
Key point
Warning alerts are given for a terrain threat that requires immediate crew action.
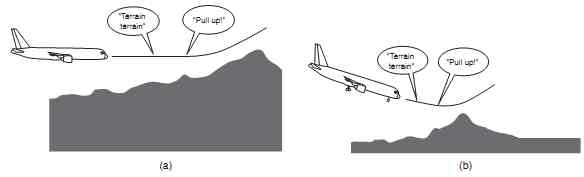
FIG. 9 GPWS Mode 2 profiles: (a) excessive terrain closure rate, (b) excessive
terrain closure rate, flaps and gear down