Variable-frequency drives are widely used to control the speed of conveyor systems, blower speeds, pump speeds, machine tool speeds, and other applications that require variable speed with variable torque. In some applications such as speed control for a conveyor, the drive is installed with a remote potentiometer that personnel can adjust manually to set the speed for the conveyor. In this type of application, the personnel who use the conveyor can manually set the motor speed with the minimum and maximum frequency that is programmed into the parameters.
In other applications, such as blower-speed control or pump-speed control, the variable-frequency drive can be controlled by a 4-20 mA or 0-10 volt input signal that comes from a microprocessor controller. When the input signal for the drive is provided from a controller, the system is considered to be a closed loop. For example, in a system where the drive is controlling the speed of a blower, a temperature sensor can be used to determine the temperature of a room. If it's too cold and the blower is moving warm air, the speed of the blower can be increased. If the temperature becomes too hot, the speed of the blower can be slowed until the temperature returns to the correct setpoint. If the variable-frequency drive is used to control the level of product in a tank by varying the speed of a pump, a level sensor can be connected to a controller. If the level of the tank is becoming low, the drive can increase the speed of the motor and pump, and if the level is too high, the speed can be reduced.
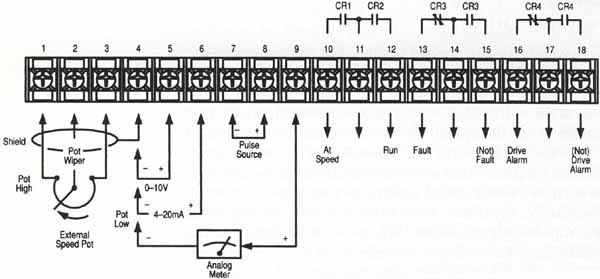
The diagrams below shows an example of the field wiring connections at the terminal boards of a drive for a typical application. In this case the drive diagram is for an Allen-Bradley 1336 drive. The top diagram shows the external control signals that are connected to terminal board 2 (TB2) of the drive. You can see that the command signal can be an external potentiometer connected to terminals 1, 2, and 3, or it can be a 0-10 volt signal connected to terminals 4 and 5, or it can be a 4-20 mA signal connected to terminals 4-6. This terminal board also provides NO and NC contacts to indicate the drive is at speed, running, faulted, or has a drive alarm. These contacts are used as part of fault or safety circuits for the system.
below: Diagram of TB2 for a 1336 Allen-Bradley drive.
Terminal board 3 (TB3) in the second diagram shows the start and stop switches that must be connected to the drive to provide the signals to cause it to start and become enabled. The signal voltage for this board can be selected as 5 volts TTL, 28 volts DC, or 115 volts AC supply. The diagram shown uses 115 volts AC. Start, stop, and jog buttons are connected to terminals 19, 20, and 22. A 115 volt signal must also be provided at terminal 30 to enable the drive. Terminals 24 and 26 provide the inputs for switch SW1 and SW2, which will be used to make a two-bit binary. code to indicate the acceleration and deceleration parameters. Terminal 23 is used to set the motor in reverse from a remote switch. Terminals 21, 25, and 29 are the common for this board and since they are connected inside the board, the common from the transformer need only be connected to one of these terminals.
below: Diagram of TB3 for a 1336 Allen-Bradley drive.
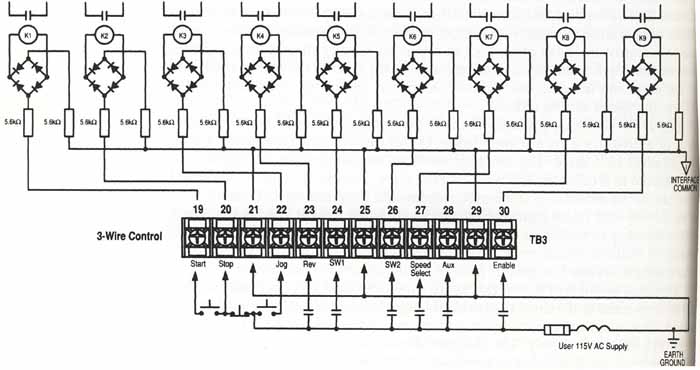
After the 115 volt AC signals that are used as inputs for this board are received they must be isolated and converted before they are sent to the microprocessor. The isolation and rectification portion of this board is shown in the first diagram. From the TB3 diagram (above) you can see that after each 115 volt AC signal is received, it's rectified and directed through a DC-powered relay to provide isolation before it's sent to the processor. The diagram also shows each signal connected to a set of resistors to drop the voltage and to a bridge rectifier to change the AC voltage to DC. The output of the bridge rectifier is connected to the coil of a DC relay. The contacts of the relay are connected to the processor inputs. Since this signal comes through a, relay, there is total isolation between the 115 volt AC used in the field switches connected to this board and the contacts that are connected directly to the processor section of the drive.
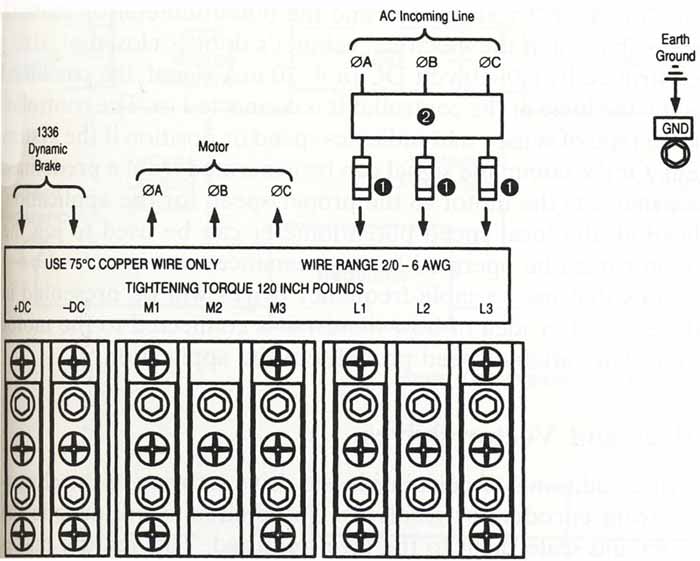
The high-voltage terminal board for the variable-frequency drive is designated as TB1. This terminal board provides connections at the far right side for L1, L2, and L3 where the three-phase 480 volt AC is connected. Terminals M1, M2, and M3 are connections for the output of the variable-frequency drive to the three-phase motor. Terminals -dc and +dc are located at the far left side of the terminal block and they provide DC voltage directly from the DC bus. This voltage is provided for a dynamic brake that can be added to the three-phase motor. The dynamic brake provides a means to stop the motor shaft quickly. The operation of the dynamic brake will be covered in a later article.
below: Diagram of TB1 for a 1336 Allen-Bradley
drive.