AMAZON multi-meters discounts AMAZON oscilloscope discounts
Modern motor starters use one of three basic methods of operation for overload block. Ill. 1 shows two typical overload blocks and a Type W and Type J heating element. The heating element is wired in series with the motor so that all of the current that the motor draws goes through the heating element and then is transferred to the overload assembly. Ill. 2 shows diagrams of the three basic types of heater and overload assemblies. The operation of the different types of overload assemblies will be explained so please notice why several different types are used.
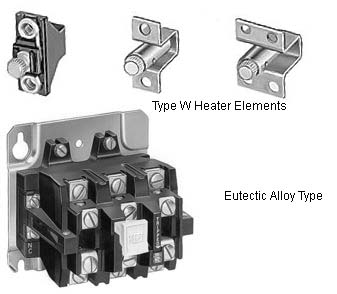
Above: Ill. 1: Example of a Type W and Type J heating element.
The first diagram -- in Ill. 2 shows the operation of a eutectic alloy overload.
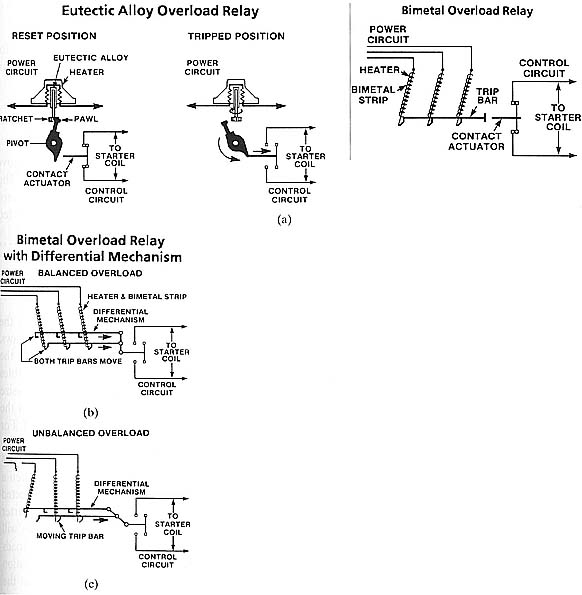
Above: (click to enlarge) Ill. 2: Examples of overload mechanisms for
motor starters. (a) shows a eutectic alloy overload relay. (b) shows
a bi-metal overload relay. (c) shows a phase-loss sensitivity overload
relay.
This type of overload assembly consists of a ratchet, pawl, pivot, and heater. The pawl acts like a trigger mechanism that's spring loaded against the ratchet. The spring provides pressure that tries to turn the pawl. If the pawl is allowed to turn, it will strike the contact actuator called the pivot. The pivot will cause the NC overload contacts to open. The shaft of the ratchet is held in place by the eutectic alloy, which is similar to solder and used to make connections on a terminal board.
When the alloy is cold, it will hold the shaft of the ratchet in place, and when excessive current flows through the heater, it will provide excess heat to the alloy. Since the alloy has a low melting point, it will melt and allow the ratchet to move freely. When the ratchet moves, the pawl is also allowed to move, and its movement will cause the pivot to move and open the overload contacts. When the overload contacts open, current to the coil is interrupted, and the main contacts to the motor will open, which stops current flow to the motor. When this occurs, the current flow to the motor stops providing heat to the heater, which allows the alloy to cool down. After several seconds, the alloy is cool enough to allow the overload assembly to be reset.
The overload assembly is reset by depressing the reset button on the front of the motor starter. The reset button moves the ratchet and pawl back to the cocked condition so that it's ready for the next over-current condition. When the ratchet and pawl return to the cocked (reset) condition, the overload contacts return to the closed position. When the start push button is depressed, current can again flow to the motor starter coil, which will cause the main contacts to close and provide current to the motor again. If the condition that caused the motor to draw excessive current is not fixed, the motor will again draw excessive current and the overload process will recur. It's important to remember that the motor current flows through the heater element, and as long as the motor current is within specifications, the amount of heat from the heating element will not be sufficient to trip the overload mechanism. When the motor draws excessive current, the additional heat from the heater element will cause the overload to trip.
The second type of overload relay is called a bimetal overload. The bimetal overload assembly uses two dissimilar metals that are bonded together to provide the movement to open the overload contacts. The bimetal strip receives excess heat from the heater when the motor draws excessive current. When this occurs, the bimetal strip begins to heat up. The heat in the bimetal strip will cause the two dissimilar metals to expand at different rates. This action causes the metal to move at one end and trip the trip bar latch mechanism. When the latch mechanism is tripped, it will open the overload contacts and interrupt current flow to the motor starter coil. When the overloads are allowed to cool down, the reset button can be depressed and reset the latch mechanism.
The third type of overload mechanism is called the phase-loss sensitivity overload relay. This type of overload assembly is similar to the bimetal overload except it uses the difference of current in any of the phases to trip the overload. The difference in current can be a loss of phase or an overload in any or all of the phases. This type of overload also has two trip bars. The bottom trip bar, called the moving trip bar, will be actuated when the unbalanced overload condition occurs. When the moving trip bar moves to the right, it will open the overload contacts, which interrupts current to the motor starter coil.

