AMAZON multi-meters discounts AMAZON oscilloscope discounts
. In the design and construction of large transformers, consideration must be given to the mechanical force existing between the primary and secondary windings. This is particularly important in order to ensure reliability in the event of a short circuit on the secondary winding. Otherwise, even before thermal damage could occur, the transformer might be catastrophically destroyed by the physical force tending to move the two windings farther apart. It will be recognized that this is a manifestation of Lenz’s law—the induced magnetic field opposes the inducing field. Being mindful of this, we might try to convert the tendency towards lateral motion in the windings of short-circuited transformers into continuous rotational motion. This would appear to be a simple enough task, and we might produce the device shown in FIG. 5.
In FIG. 5, the “primary” of our “rotary transformer” is the stator of the machine, whereas the short-circuited “secondary” is the rotor. This looks promising because no commutator or brushes are needed. However, upon energizing the stator from an AC source, you might have become disappointed with the humming and heating of this strange transformer and might conclude that rotation was not forthcoming.
---
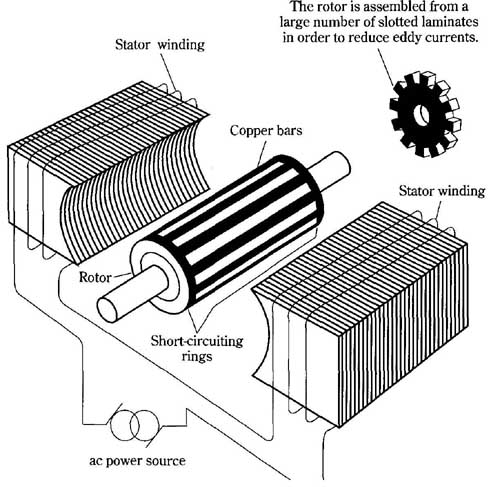
FIG. 5 The squirrel-cage induction motor can be viewed as a “rotary
transformer.” The rotor is assembled from a large number of slotted laminates
in order to reduce eddy currents. Stator winding
---
To start rotation of the induction motor, manually spin the shaft. The motor then will accelerate up to operating speed, and even a relatively crude experimental model will reveal the potentially favorable features inherent in an AC motor of this type.
If the single-phase induction motor was not set in operation, an accurate report of the experiment would have stated merely that no net torque was developed in the rotor. The fact that equal, but opposite, torques were produced would have been suggested by the vibration and humming.
A mathematical approach is helpful in understanding the torque in the single-phase induction motor. FIG. 6A is a simple vectorial representation of the field “seen” by the rotor when the starter is fed with a sinusoidally varying current. The vertical projection of the rotating vector depicts the magnetic field strength, PHI_max, as an angular function of maximum field strength, PHI_max The cyclic excursion of PHI_max is made in response to the sinusoidally varying current in the stator. If, For example, the vector diagram represents a time corresponding to 45° in the progress of such a sine wave, then PHI_max will have an amplitude equal to sine 45° (PHI_max) or 0.707
However, there is more than meets the eye here.
In FIG. 6B, an equivalent vectorial representation of the sinusoidally varying field is shown. In this diagram, field strength PHI_max is produced as the result of counter- rotating fields, each having the value of:
PHI_max/2
Again, PHI_max is always a vertical vector. Here PHI_max goes through the same amplitude variations as it does in FIG. 6A. This being so, it must be an equivalent graphical and mathematical way of showing how the pulsating field, PHI_max, varies in amplitude during the excursion of a cycle of stator current.
The significance of the counter-rotating vectors,
PHI_max/2
is shown by the curves in FIG. 6C. These curves reveal that two equal and opposite torques prevail during standstill. Obviously, there is no reason for the motor to rotate in one direction or the other. However, when a small rotational force is imparted to the rotor from an outside source, one torque exceeds the other. It can be assumed that the shaft is given a spin by some manual method, such as pulling a cord wound several times around a pulley. When a net torque exists in one direction, the motor will accelerate until it approaches synchronous speed. Synchronous speed is given by the equation:
S = 120 x f/p
where:
S = the synchronous speed in revolutions per minute,
f = the frequency of the AC power source in hertz, and
p = the number of poles in the stator.
-- --
A. Simple vector representation of a sinusoidally varying field.
B. An equivalent representation in which two counter-rotating vectors produce the resultant field.
C. Rotor torque as a function of speed.
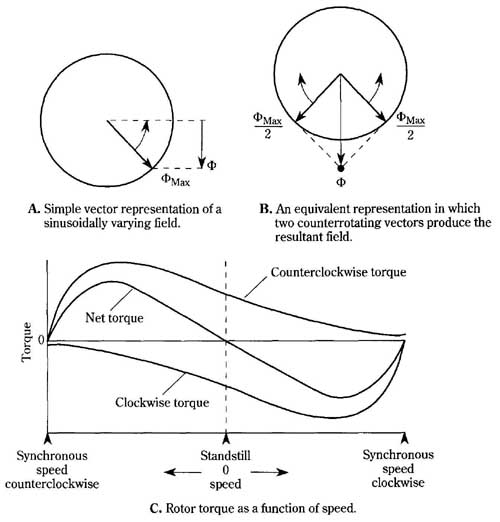
FIG. 6 Field strength and torque in the single-phase motor.
-- --
The motor can never attain synchronous speed because, at that speed, the net torque is zero. The difference between synchronous speed and actual speed is called the slip speed. The more heavily loaded the motor is, the greater the slip speed is. This behavior constitutes reasonable proof for the theory of counterrotating fields and their accompanying torques.
Another way of describing the action of the rotor is to say that once it’s rotating, it’s under the influence of a rotating field that is stronger than that of the oppositely rotating field. The concept of a rotating field is important because all induction motors produce a rotating field. In our discussion, an external starting method was used to expose the rotor conductors to a net rotating field. Naturally it’s desirable to have a motor that is able to start on its own. There are various starting arrangements and devices that pertain to many differently named motors, all of which are essentially induction motors.
===