AMAZON multi-meters discounts AMAZON oscilloscope discounts
Introduction
Electric motors are used throughout industry, commerce and in the home in a wide variety of power ratings, speeds and duties. A typical home will easily have 40 motors in domestic appliances, hand tools and audio equipment; a modem car is unlikely to have fewer than 15 motors, ranging from the starter motor to adjusters for windows, seats and mirrors. Electric motors were invented well over 160 years ago and a number of distinct types of machine have developed, as described later in this sect.. Although usually regarded as a mature technology, the changing needs for motors and the emergence of new associated technologies, such as power semiconductors, continue to lead to changes in the types of machine that are used, in their applications and also in the way that motors are designed and built.
For instance, the field of adjustable speed drives was at one time dominated by dc machines because speed control could be readily managed without complicated high- speed switching of the power. With the emergence of power semiconductors, first in the form of thyristors and bipolar transistors, then MOSFETs and IGBTs, power switching technology has become commercially viable across a wide power range from watts to megawatts. One application of that technology has been in variable- frequency inverters, which enable the cheaper, more reliable ac induction motor to be used in many adjustable speed drives in place of the more complicated and expensive dc motor.
Advances in magnet technology have made permanent magnet motors more cost-competitive, especially in adjustable speed drives, and the so-called 'brushless dc drive' has already found widespread acceptance in applications in a wide variety of domestic and commercial products where a low-cost solution is required. In the industrial market, these drives are more commonly found in high-cost, high-precision drive systems, often where a positioning function is required in addition to speed control.
More recently, the switched reluctance motor has re-emerged. It was one of the earliest forms of electric motor but fell into disuse because of a lack of suitable control devices. Now incorporated into a switched reluctance drive using modem semiconductors, the switched reluctance motor is arguably cheaper and simpler than the induction motor, and it threatens to take over variable speed applications currently served by induction motors, as well as competing with dc motors and ac universal motors.
These types of motor and drive are described later in the sect., but each of them relies on common basic principles and has to operate within certain constraints.
These principles and constraints are explained before describing the various types of motor and drive.
===
Force --Magnetic Field -- Current
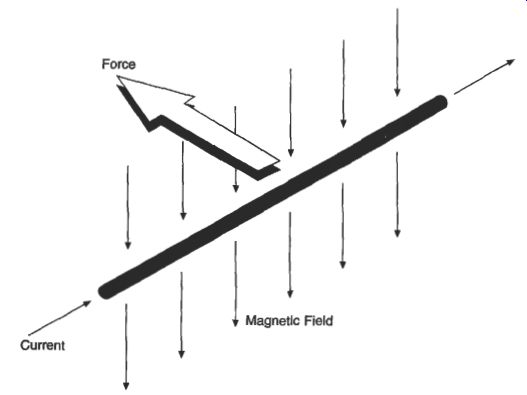
Fig. 1 Electromagnetic force production
===
General characteristics
This section covers the principles of torque production, the main components found in all motors and the related topics of losses, efficiency and heat dissipation.
The production of torque
The power delivered by a rotating shaft is the product of torque and speed. The mechanisms for the production of torque are therefore a critical part of motor operation and, as shown below, are sometimes used to distinguish the different types of motor.
There are two basic principles for torque production in electric motors; these are known as electromagnetic torque and reluctance torque. Virtually all motors use one or the other, or a combination of both.
Fig. 1 shows a conductor carrying a current. At right angles to the conductor there is a uniform magnetic field having a density of B webers per square meter or 3 tesla. If the conductor has a length 1 meters and the current is I amps, it can be shown that the force on the conductor in the direction shown (in newtons), is given by:
F=BxIxl
This is termed 'electromagnetic' force since it’s the product of an electric current with a magnetic flux density. If this force acts on a conductor mounted on the rotor of a motor at a radius r meters, then the torque acting on the rotor is F x r (in newton meters). This means of electromagnetic torque production is the most commonly used in electric motors, although different types of motors use different methods of passing the current I through the conductor and different ways of producing the flux density B. It’s used in, for example, induction, synchronous and dc motors.
The second torque production method used in electric motors makes use of the fact that any magnetic circuit tends to move to a position at which its reluctance is a minimum (i.e. where the inductance of the exciting coil producing the mmf is a maximum). This is exploited by having a magnetic structure which has saliency.
Fig. 2 shows a machine with a stator and a rotor both having salient poles: as the rotor turns, the air gap presented to the stator poles changes, resulting in a change in the reluctance of the magnetic circuit. By passing current into the winding around the stator poles, magnetic flux is set up in the magnetic circuit. The path of the flux is shown very approximately. The flux produces a force which acts to reduce the reluctance of the magnetic circuit and the rotor will experience a reluctance torque as it attempts to align itself in a position of minimum reluctance (or maximum inductance) when the stator and rotor saliencies are aligned to give the minimum air gap between rotor and stator. This torque production method is used in stepper motors and switched reluctance motors; the torque can be produced by exciting a winding on only one member and it’s not necessary to have a permanent magnet on either member.
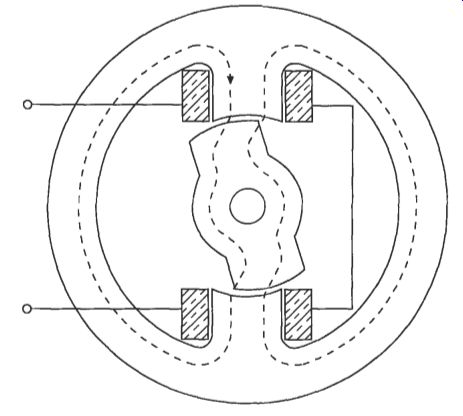
Fig. 2 Reluctance torque production
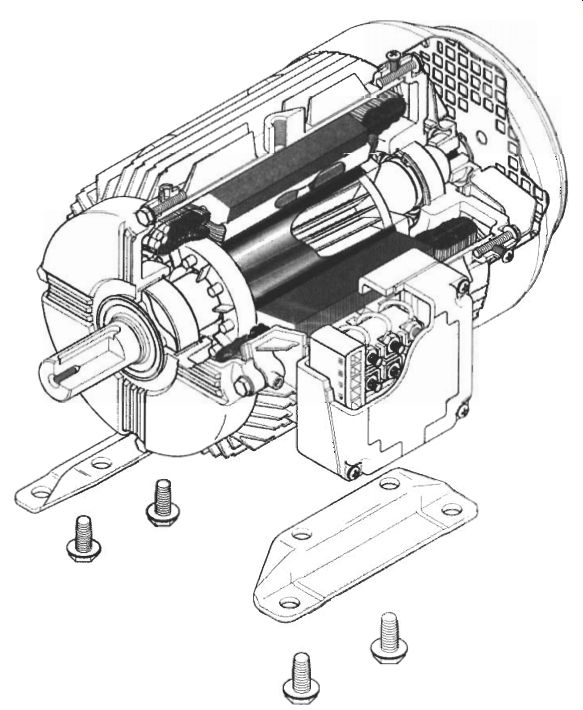
Fig. 3
Main components and construction
Generally, motors comprise a stationary part, the stator, and a rotating part, the rotor. Typically, the stator is on the outside and the rotor rotates within it, although inverted machines, typically found in small fan drives, have the rotor on the outside. The main part of both stator and rotor is a core which is usually built from a stack of electrical steel laminations and has slots or salient poles to accommodate and support the windings. The laminations are normally 0.2 to 1.0 mm thick. In small and medium power motors they are punched from coils of electrical steel by a multi-stage press tool; in larger sizes they are produced on single-stage presses from sheet.
The general construction of small and medium power motors is illustrated by the sectional drawing of a cage induction motor. The stator windings are embedded in slots around the inner bore of the stator core and the winding overhang outside the core is securely laced together. The outer surface of the rotor core is accurately machined to be concentric with the bearing journals and to have a diameter which, in conjunction with the stator bore, will produce the air gap of the machine.
The air gap will have a radial length of the order of 0.2 mm for very small machines and up to several cm for machines developing megawatts.
In some motors, the stator is contained in an external frame and the rotor is supported in bearings mounted in the end shields or end brackets, which are located in the ends of the stator frame by spigots which ensure the rotor runs centrally within the stator. These are shown and also more clearly in the exploded diagram. In many cases, the frame is finned to increase the surface area and improve dissipation of the heat generated by the electrical losses in the motor. The complete motor can be supported by feet on the stator (foot mounted) or by providing a flange on the drive-end end shield (flange mounted), or occasionally by both. By contrast, motors which are intended for incorporation into an enclosed appliance, such as a dishwasher pump, generally use a so-called frameless construction, where there is no separate frame for the core and skeletal bearing housings are mounted directly to the ends of the stator core. Larger high-voltage motors are generally mounted within fabricated steel frames and end shields.
One method of classification of machines, particularly for industrial applications, is to describe the degree of protection offered to the user and the mechanical protection afforded to the windings of the machine by the frame. Various levels of protection are used and these are defined in, (IEC 60034-5) in the form of various ZP classifications. IP22, for instance, is a basic type of enclosure often referred to as drip-proof or open ventilated and this is commonly used for induction motors driving compressors. A much greater degree of protection is offered by an IP55 enclosure which is often known as totally enclosed. Special forms of enclosure are required for, For example, flameproof (EEx 'd') motors for hazardous areas and these requirements are described. An induction motor with an EEx 'd' enclosure.
As noted above, the rotor is normally mounted in bearings housed in the end-shields.
The rating of these bearings is dictated by, among other things, the speed of the motor and the side and end loads on the shaft. Simple sleeve bearings are suitable at low powers and loads, standard deep groove ball bearings are commonly used in the 1-200 kW range, roller bearings are often used for motors with high radial shaft loads (such as a belt drive with high tension in the belt) and sophisticated lubrication systems are used on large machines.
With the advent of adjustable speed drives which require a speed feedback signal, it’s becoming more common to find some form of speed or position transducer mounted on the motor, typically at the non-drive end. The devices used range from simple, low-cost optical switches in switched reluctance motors through Hall-effect transducers in brushless dc machines to high-cost, high-resolution resolvers in dc servo drives. The devices may have their own terminal box and wiring loom or they may be connected through the main terminal box of the motor.
Losses and heat transfer
Losses in electrical machines are important first because they determine the efficiency of the machine and secondly because they generate heat in the machine. In many cases efficiency is not a primary concern to the user but it should be noted that a motor running continuously on full load will have an energy consumption which could equal its capital cost in a matter of months. The heat generated by the losses has to be dissipated effectively in order to ensure that the insulation in the machine does not operate at temperatures above its rated capability and that the surface temperature of the enclosure does not present a hazard to the user. It follows that the ability of the machine to dissipate its losses will directly affect its output rating.
The power loss in most electrical machines can be classified under four headings: resistive loss in the windings (copper loss) loss in the stator and rotor cores due to hysteresis and eddy current losses (iron loss) friction loss in the bearings windage loss associated with the rotor causing turbulence in the air surrounding it Many machines operate at fixed speed and fixed voltage, and for these machines some components of the loss are independent of the power level at which they are operating; the friction and windage loss and many of the components of iron loss fall into this category. However, the copper loss in the windings generally varies as the square of the machine load. So although the losses increase with load, they decrease with load when taken as a proportion of power output; This means that the efficiency of an electrical machine generally increases as its power output increases and is likely to peak near full load.
The balance of the components of the loss varies with both the type and size of machine. In general, small machines have a much greater proportion of copper loss than iron loss, whereas the opposite holds for larger machines. Since the copper loss is generally load dependent, it follows that the efficiency of a small machine varies much more with load than a larger machine. In terms of absolute values of efficiency for different sizes of machine, induction machines of the same rated speed have full- load efficiencies of approximately:
0.1 kW 55% 1.0 kW 75% 10 kW 90% 100 kW 95% 1 MW 97%
The benefit of scale is clearly shown in these figures.
Because many of the power losses occur in the interior of the machine, arrangements have to be made to ensure that the heat resulting from these losses is conducted away effectively. The heat from the windings is normally dissipated into air flowing around exposed parts of the winding and/or into the core supporting the winding. To assist in the latter, the winding is thermally bonded to the core by impregnating the assembly with a varnish or epoxy compound which consolidates the winding, improves its electrical insulation and greatly improves the heat transfer to the core. Methods of impregnation include:
dipping the wound core in varnish, draining the excess and baking it in an oven trickling a viscous gel (normally polyester based) onto the winding and allowing it to be drawn in by capillary action before setting evacuating the air from the winding in a vacuum chamber, flooding the chamber with varnish (normally an epoxy compound), increasing the pressure in the chamber above ambient to force the impregnant into the winding, draining the excess and baking in an oven. This process is known as Vacuum Pressure Impregnation (VPI) and produces a very rugged assembly with good heat transfer from the winding to the core. A large VPI plant is shown.
Heat from the magnetic losses in the cores can be removed either by direct cooling with an airstream or by conduction to the frame. In the latter case, the interference fit between the core and the frame needs to be carefully controlled to ensure good thermal conduction.
In small machines of less than a kilowatt rating, the heat transfer paths are short and dissipating the losses is relatively straightforward, particularly since the machine has a relatively high surface to volume ratio. In the medium range of power output up to several hundred kilowatts, many machines are of the totally enclosed type referred to in the previous section; these generally have a shaft-mounted fan outside the frame at the non-drive end, which is arranged to drive air over the outside surface of the frame. These are known as Totally Enclosed Fan Ventilated (TEFV) machines. Larger machines in the megawatt range present greater problems for heat transfer because of the absolute size of the losses involved (even though the efficiency is higher) and the fact that the surface to volume ratio falls as the machine size increases. Special arrangements have to be adopted, including dividing the cores into short packets with cooling air flowing between them, providing water cooling for the stator core, using closed air circulation within the machine in conjunction with a water-cooled heat exchanger etc. A large closed air circuit generator and large motors have very similar forms of construction. In the largest sizes, hollow conductors with de-ionized water flowing through them are used.
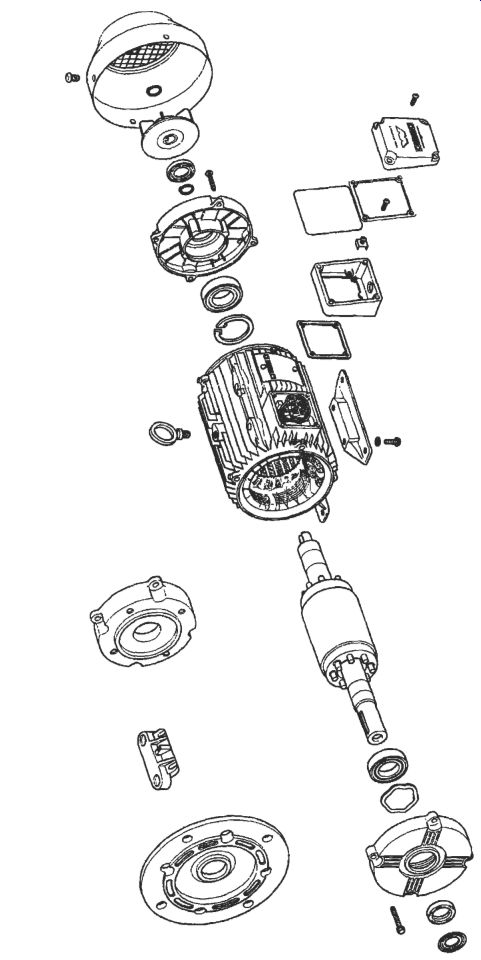
Fig. 4--Exploded view of induction motor.