AMAZON multi-meters discounts AMAZON oscilloscope discounts
10.3 POTENTIAL RELAYS
The potential relay is gaining popularity because it can be adapted easily to most any compressor. The back electromotive force produced by the starting winding of a motor is the controlling factor of a potential relay.
Operation
When a single-phase motor is operating, a voltage is produced across the starting windings above and beyond the voltage being applied to the motor. The starting windings actually act as a generator to produce the back electromotive force of a motor. The back electromotive force of a motor corresponds to the motor speed. The potential relay is designed to open, dropping the starting circuit, when the motor reaches a certain back electromotive force that's predetermined by the manufacturer of the motor.
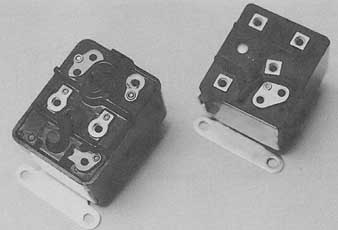
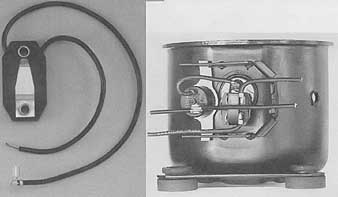
Figr. 10.6 Potential relays
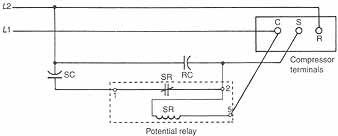
Figr. 10.7 Schematic diagram of a potential relay
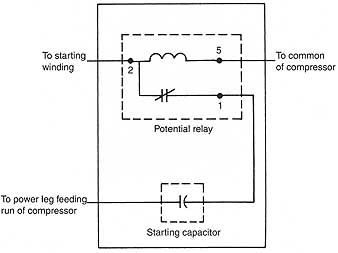
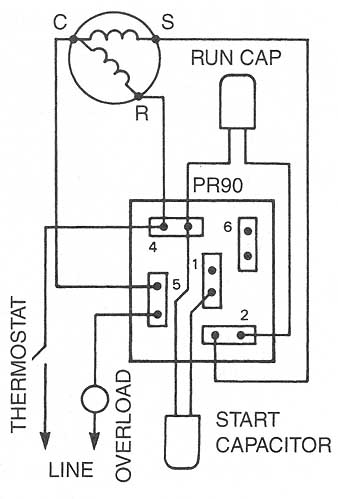
Figr. 10.8 Schematic diagram of a hard-start kit: To starting
winding; To power leg feeding run of compressor; To common of compressor;
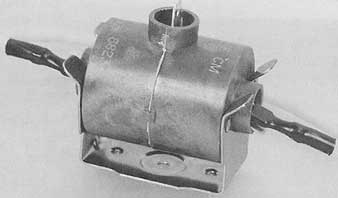
Potential relay
ill 10.6 shows two potential relays that look much like ordinary general-purpose relays. The wiring diagram for a potential relay is shown in ill 10.7. The potential relay has an advantage over other relays because its contacts are normally closed when the unit starts, so there is no arcing. Arcing is an electric spark that's produced across two sets of contacts. As the motor speed increases, so does the back electromotive force. When the speed approaches 75% to 80% of full speed, the back electromotive force is large enough to drop the starting circuit by energizing the potential relay coil. The potential relay is rated by, and operates on, three voltage ratings: pickup voltage—the minimum voltage required to energize the coil and open the NC contacts; dropout voltage—the minimum voltage the coil requires once it's energized to keep the contacts from closing; and continuous coil voltage—the maximum voltage at which the coil can continuously operate.
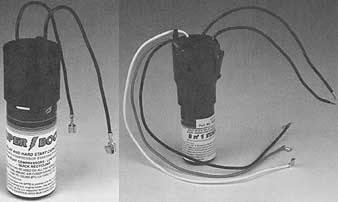
On many permanent split-capacitor hermetic motors that are experiencing difficulty starting, a hard-starting kit can be installed to eliminate the problem, making the PSC motor a capacitor-start—capacitor-run motor. A hard-starting kit consists of a potential relay and a starting capacitor. ill 10.8 shows the schematic diagram of a hard-start kit, and ill 10.9 shows a hard-start kit as it would come from a manufacturer.

Figr. 10.9 Hard-start kit.
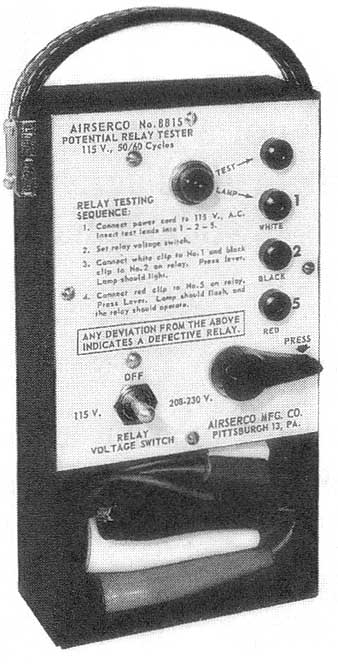
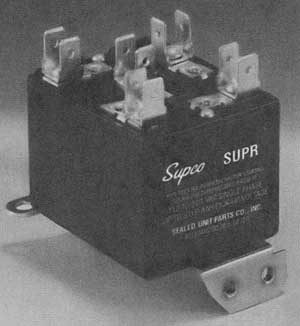
Figr. 10.10 Commercial potential relay tester.
Troubleshooting
The potential relay is easy to troubleshoot because only two parts of the relay must be checked. The coil of the potential relay can be checked with an ohmmeter across 2 and 5 (ill 10.7), which could check out as good, open, or shorted. The contacts of the potential relay across 1 and 2 should be checked, and they should be closed. Motor current will increase if the potential relay does not drop the starting circuit at the proper time. This condition is dangerous to the motor and the starting apparatus. The potential relay should always be checked completely to prevent this condition. A service technician should always check the operation of a unit after the dropout of a starting relay. The correct size relay should always be used for replacement of a faulty relay. If the starting relay is working properly, there will be no ampere draw through the starting circuit after the motor has reached full -speed. ill 10.10 shows a commercial potential relay tester.
The use of potential relays on single-phase hermetic motors has increased over the past 10 years. Potential relays vary greatly in number of terminals, coil group, pickup voltage, and mounting position. An explanation of the number system of the two major manufacturers of potential relays should be helpful in the field.
The two major brands of potential relays are General Electric and RBM. Explanations of their numbering codes are given in ills 10.11 and 10.12, respectively. Pay careful attention to the coil group and the pickup voltage when you cross-reference a potential relay.
10.4 SOLID-STATE STARTING RELAYS and DEVICES
The advancement of solid-state controls has produced another type of current-sensitive relay, a PTC starting switch. Certain ceramic materials (PTC) increase their resistance as they heat up from current passing through them. This is the basis of the solid-state relays that are replacing many of the other varieties on fractional horsepower motors. A PTC solid- state starting relay is shown in ill 10.13. The solid-state starting relay used on small split-phase and capacitor-start motor compressors is simple in its operation. The device is used to drop out the starting windings and starting capacitor of a small hermetic compressor motor. ill 10.14 shows a solid-state relay installed on a fractional-horsepower hermetic compressor. The flexibility of the solid-state relay has greatly expanded its usage because one relay will cover a range of horsepowers. Manufacturers are producing a PTC relay with a built-in starting capacitor, as shown in ill 10.15, and a built-in starting capacitor and overload, as shown in ill 10.16.
Figr. 10.13 Solid-state starting relay
Figr. 10.14 Solid-state starting relay installed on a compressor
Figr. 10.15 Solid-state relay with built-in capacitor; Figr. 10.16
Solid-state relay with built-in capacitor and overload
Figr. 10.17 Positive temperature coefficient starting device
Permanent split-capacitor (PSC) motors often need assistance in starting. A potential relay and starting capacitor can be used to change a normal PSC motor into a capacitor-start—capacitor-run motor with a high starting torque. On some occasions a positive temperature coefficient start device is used to increase the starting torque of a PSC motor. The PTC start device is easier to install and less expensive than the conventional potential relay and starting capacitor. ill 10.17 shows the PTC start device. This device is wired in parallel with the run capacitor. The PTC start device per forms much like a small starting capacitor; it momentarily increases the current in the motor starting winding. As the material heats up, its resistance increases quickly to the point where it becomes a nonconductor and the motor returns to PSC operation. This device requires a three-minute cool-down period between starts. To check this device, the service technician need only determine if it's dropping out of the circuit or if it's being energized on startup. It should be replaced if it's not working properly.
An electronic motor starting relay has been introduced that can be used as a universal replacement for many motor starting relays in the industry. This electronic relay operates on a time function principle rather than sensing voltage or current. The time function design allows this relay to be used as a replacement for many potential and current starting relays. This relay is shown in ill 10.18. The wiring diagram is shown in ill 10.19 with the relay replacing a potential relay and in ill 10.20 replacing a current-type relay.
Figr. 10.18 Universal motor starting relay:
Figr. 10.19 Wiring of universal relay replacing potential relay:
WIRING AS A POTENTIAL RELAY: REPLACES ALL POTENTIAL MOTOR STARTING RELAYS
FOR COMPRESSORS RATED AT 120 TO 270 VAC SINGLE PHASE UP TO 5 H.P. ANY PICK-UP
VOLTAGE. DIAGRAM NOTE: A wire from the RUNNING TERMINAL of the compressor
motor must be connected to #4 on the relay.
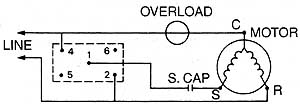
Figr. 10.20 Wiring of universal relay replacing a current relay: PRO-90 WIRING AS A CURRENT STARTING RELAY
Operation
The solid-state starting relay is placed in series with the start winding of the fractional horsepower hermetic compressor, as shown in ill 10.21. The solid-state starting relay normally has a very low resistance. As the compressor motor starts, the current flows to the start winding. The resistance of the solid-state starting relay rapidly rises very high. Therefore, the current flow to the start winding is reduced greatly, which takes the starting winding out of the circuit. Most solid-state starting relays can also be used with a capacitor placed in series with the relay and start winding, as shown in ill 10.22. One advantage of the solid-state starting relay is that one model covers a variety of horsepower ranges. E.g., one relay could be used from ½-horsepower to1/5-horsepower, and another from 1/4 horsepower to 1/3 horsepower. Some manufacturers produce this type of relay to cover compressor motors above 1/3 horsepower. The major advantage of this type of relay is that the service technician can stock three basic relays and cover many applications and sizes.
These starting devices are also available with a built-in starting capacitor (refer again to ill 10.15). When the relay capacitor is used, the existing overload must remain on the compressor for protection. A three-in-one relay is also available (refer again to ill 10.16) that contains the solid- state relay, a capacitor, and an overload.
The solid-state PTC-type starting relay is usually limited to domestic refrigeration applications, but it can be used on other applications if the manufacturer’s installation instructions are followed. The solid-state relay usually requires 3 to 10 minutes to cool down between operating cycles, so it's not feasible for short-cycling applications.
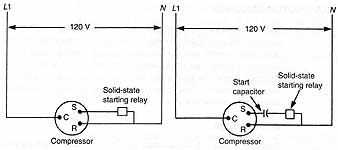
Figr. 10.21 Schematic diagram of compressor and solid-state starting
relay (split-phase motor); Figr. 10.22 Schematic diagram of compressor and solid-state starting relay (capacitor-start motor)
Troubleshooting
The solid-state starting relay is easy to troubleshoot because of its simplicity. On many occasions, the relay will show some visible signs that would indicate the condition of the relay. In some cases, the relay will be charred, severely burned, and cracked; in other instances, the relay will only be slightly burned. The relay can also be checked with an ohmmeter: If the resistance is very low, the relay is good; a high resistance across the relay indicates a bad relay. The technician must make certain the relay is cool when performing the resistance check. The service technician could also check to make certain the relay is dropping the starting winding out of the circuit by using a clamp-on ammeter if a wire is connecting the relay to the compressor terminal. If the relay pushes directly onto the compressor terminals, this check is practically impossible; hence, an amp reading of the compressor motor must be taken, and a judgment must be made whether the start winding remained in the circuit.
10.5 MOTOR BEARINGS
All rotating electric equipment has some type of bearing to allow for smooth and easy rotation. A bearing is that part of a rotating electric device that allows free movement. The two types of bearings used in the heating, cooling, and refrigeration industry are ball bearings and sleeve bearings, shown in ill 10.23. The ball bearing is the most efficient because it produces less friction. The sleeve bearing is cheaper, however, and is more commonly used.
Ball Bearings
Ball bearings are designed with an inner and an outer ring, which enclose the balls by use of a separator. The inner ring is the bore in which the shaft is pressed.
Ball bearings are lubricated in three ways. The permanently lubricated bearings are sealed at the factory and only rarely require additional lubrication. The packed lubrication of ball bearings is done by hand. The bearing must be disassembled and hand packed with grease every two to five years. Many ball bearings are equipped with a grease fitting and should be lubricated every two years. Lubrication is of prime importance to a motor. Note that over-lubrication is as damaging as under-lubrication. ill 10.24 shows a ball bearing pressed into an end bell of a motor.
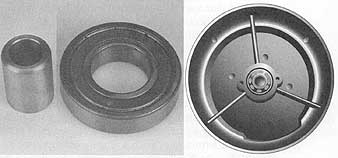
Figr. 10.23 Sleeve and ball bearings used in the industry; Figr. 10.24
Mounted ball bearing
Ball bearings are used on most heavy loads. However, ball bearings can't be used in a hermetic compressor because of the danger of sparks. Some of the many advantages of using ball bearings are mountings in any position, antifriction design, versatility, and the ability to carry a large load. Ball bearings are often permanently lubricated from the factory or require infrequent lubrication. Thus, they require less maintenance than a sleeve bearing. The life of a ball bearing is usually long and trouble free, but mis use can rapidly destroy a ball bearing.
Sleeve Bearings
Sleeve bearings are brass or bronze cylinders in which a shaft rotates. The bearings have more friction than the ball bearing and thus are used for lighter duty. Lubrication of sleeve bearings is accomplished by oil wick lubrication, yarn-packed lubrication, or oil ring lubrication.
The oil wick lubrication has a wick that extends into an oil reservoir. The wick picks up oil from the reservoir and transfers it to the shaft, as shown in ill 10.25. The reservoir should be filled with oil twice a year.
The yarn-packed lubrication is merely yarn packed around the shaft to lubricate it, as shown in ill 10.26. This bearing should be lubricated every few months.
The oil ring lubrication is used on large motors. In this device a ring rotates through an oil reservoir, picking up oil and transferring it to the shaft, as shown in ill 10.27. The oil level of the reservoir should be checked monthly.
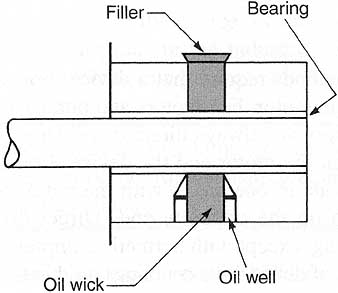
Figr. 10.25 Oil wick lubrication of a sleeve bearing
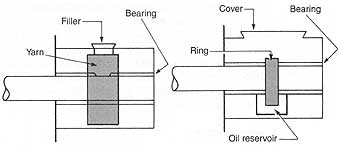
Figr. 10.26 Yarn-packed lubrication of a sleeve bearing; Figr. 10.27
Oil ring lubrication of a sleeve bearing
Hermetic compressors use sleeve bearings because with sleeve bearings there is no danger of sparks. Care must be taken in mounting motors equipped with sleeve bearings because of the lubrication problems when the bearings are mounted in a vertical position. Sleeve bearings are commonly used in many applications in the industry.
10.6 MOTOR DRIVES
A motor drive is the connection between an electric motor and a component that requires rotation. Electric motors are used to drive most devices that require rotation. There are two basic driving devices: direct drive and belt and pulley drive.
Direct Drive
Direct-drive methods require that a device turn with the same revolutions per minute as the motor. Fan motors and pumps are often direct drive; hermetic compressors are always direct drive. Direct-drive hookups require a close fit between the motor and the device. In a hermetic compressor, the crankshaft is made in one piece, with the motor on one end and the compressor portion on the opposite end. Direct-drive applications usually require a coupling, except with hermetic compressors and fan motors.
The two types of direct-drive couplings used in the industry are the flexible hose coupling, as used on oil burners, and flange couplings, as used on some open types of compressors and hot-water pumps. ill 10.28 shows both commonly used types of direct-drive couplings.
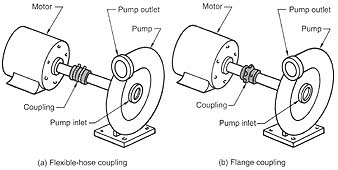
Figr. 10.28 Two widely used direct-drive couplings: (a) Flexible-hose
coupling; (b) Flange coupling
Figr. 10.29 V-belt connection between fan and motor
CAUTION: When removing a device from the shaft of an electric motor, make sure that the motor shaft or the device being removed isn't damaged.
V-Belt
Although many types of belts are used to drive devices, only the V-belt will be discussed here. It is used almost exclusively in the industry. By using two pulleys and connecting them with a V-belt, rotation can be transferred from the motor to the device, as shown in ill 10.29. V-belts are used in many applications in the industry, such as driving open types of compressors, fan motors, and pumps.
CAUTION: The technician should never wear loose clothing or neckties when working around rotating equipment. Long hair should also be tied back.
There are basically three sizes of V-belts used at present. Size FHP V-belts are 3/8 inch wide and used on fractional-horsepower motors. Size A-section is ½-inch wide and used for most jobs requiring one- to five-horsepower motors. Size B-section is 21/32 inch wide and used when the motor pulley is larger than 5 inches in diameter. More than one V-belt is often used to pull large devices. When belt changes are needed, a matched set should be used in a dual-belt application. The equipment’s revolutions per minute can be changed by changing the pulley size or sizes. The following formula can be used:
diameter of equipment pulley = motor rpm X motor pulley size / rpm of equipment
This formula can be transposed to solve for any of the stated values by simple algebra. E.g., if the motor rpm were 1750 with a 5-inch pulley, what size equipment pulley would be required to produce a speed of 1000 rpm?
diameter of equipment pulley = motor rpm x motor pulley size / rpm of equipment
diameter of equipment pulley = 1750x5 / 1000
diameter of equipment pulley = 8.75 inches
V-belts should always be properly aligned and the tension adjusted. ill 10.30(a) shows an incorrectly aligned V-belt. The proper amount of tension for most belts is shown in ill 10.30(b). Frequently a V-belt will slip, causing erratic equipment speed or breakage. In these cases, the belt should be replaced and the tension adjusted correctly.
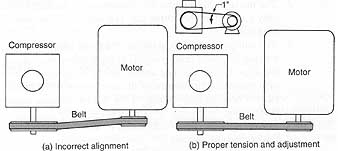
Figr. 10.30 V-belt alignment: (a) Incorrect alignment; (b) Proper
tension and adjustment
CAUTION: Always use caution when working around an electric motor that's transferring rotating motion with V-belts.