AMAZON multi-meters discounts AMAZON oscilloscope discounts
When the rotor increases its rpm, it will begin to generate a back voltage or counter-voltage. This voltage is also called counter EMF (electromotive force). The difference between the counter EMF and the applied voltage at full speed may he only I to 2 V. This voltage is called the potential difference between the two voltages and it's responsible for causing the current flow required to keep the rotor spinning at its rated speed. The current required to keep the rotor spinning at its rated speed when it's driving a load is called full-load current ( FLA).
If the load is increased, the rotor's rpm is slowed slightly, which will cause the counter EMF to be reduced slightly. Since the counter EMF has decreased and the applied voltage has remained the same, the difference of potential will increase and cause additional current to flow. The increased current will cause the motor to produce more torque, which will cause the rotor to come back up to speed. This feature makes the motor self-regulate its load. This characteristic of single-phase motors helps them operate at fairly constant speed throughout their load range. If the motor is overloaded too heavily, the rotor will slow down to the point where it will stall. During this time it will continue to draw excessive current and overheat severely.
Methods of reversing the split-phase motor are presented in Fig. 1. In this figure note that terminals 5 and 8 of the start winding are reversed to get the rotor spinning in the opposite direction. Once the rotor begins spinning in one direction, the magnetic phase shift that is created will cause the motor to continue to rotate in that direction. If one finds that the application requires more starting torque, a start capacitor should be added to the split-phase motor to make it a capacitor start, induction run motor.
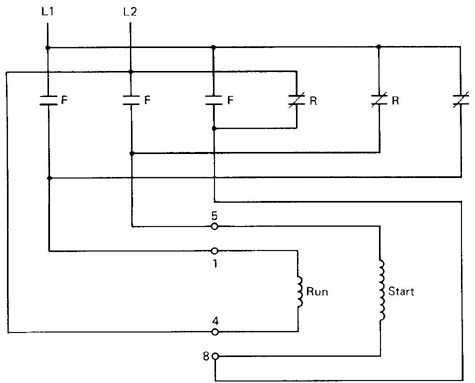
Above: Fig. 1